Изобретение относится к области средств очистки и может применяться в различных отраслях народного хозяйства с указанной целью:
Целью изобретения является расширение эксплуатационных возможностей устройства.
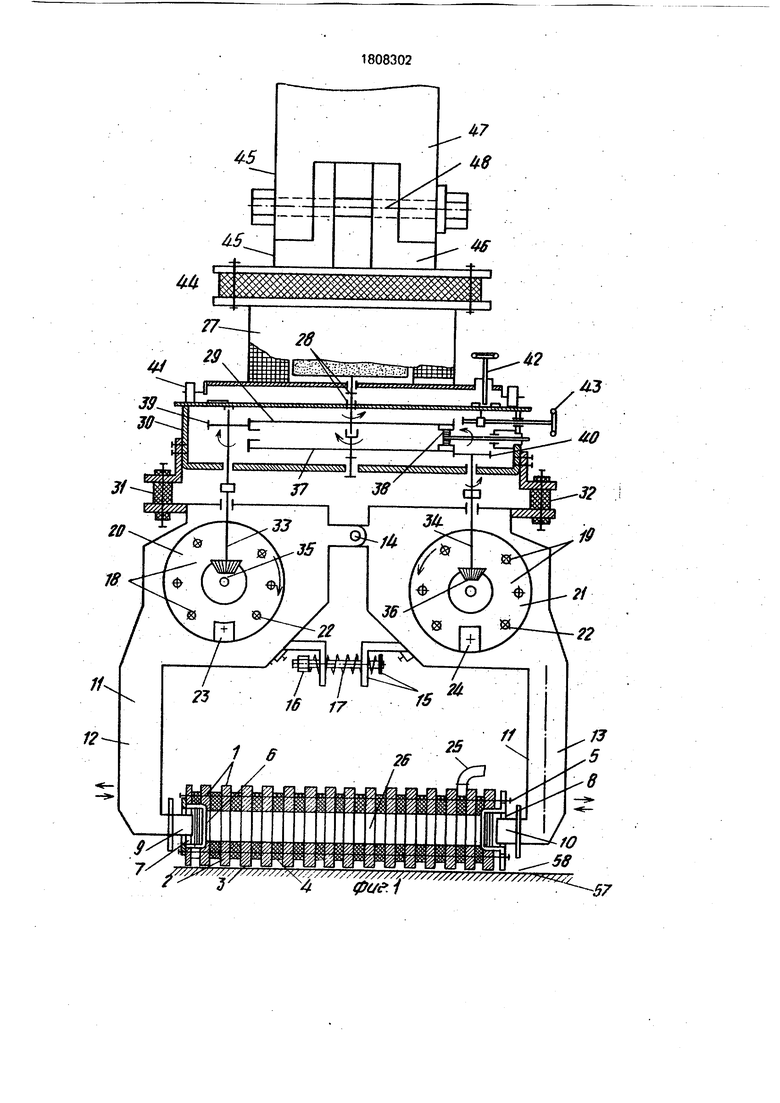
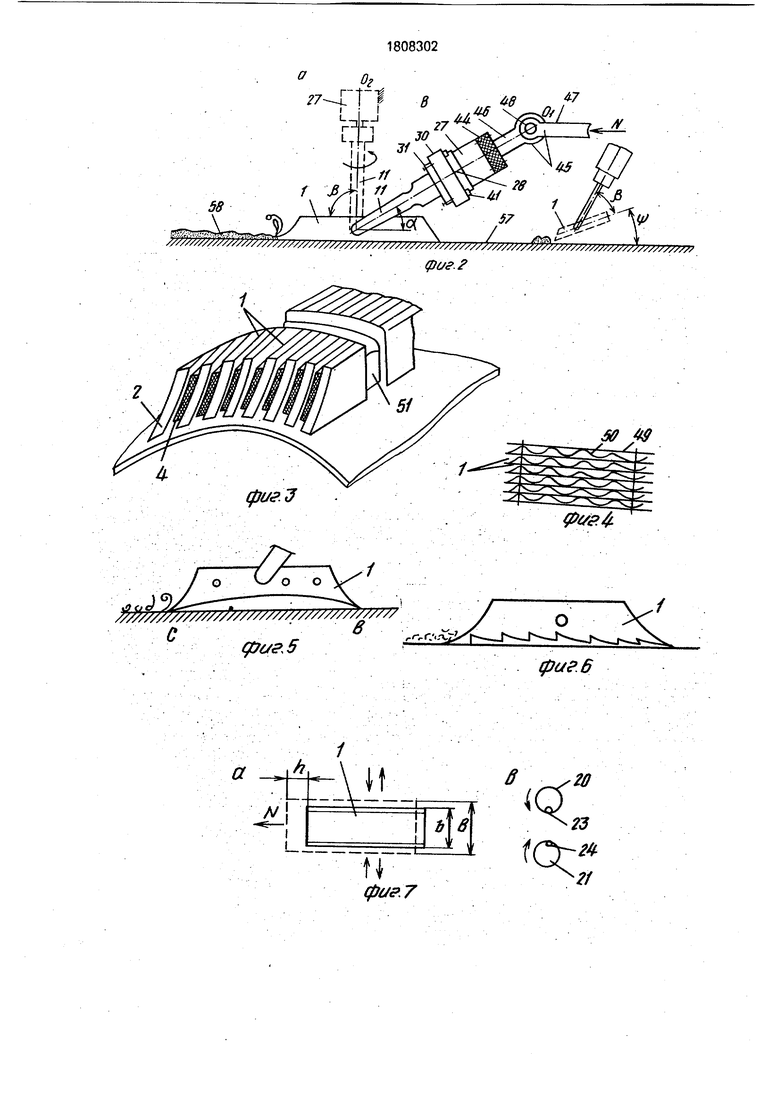
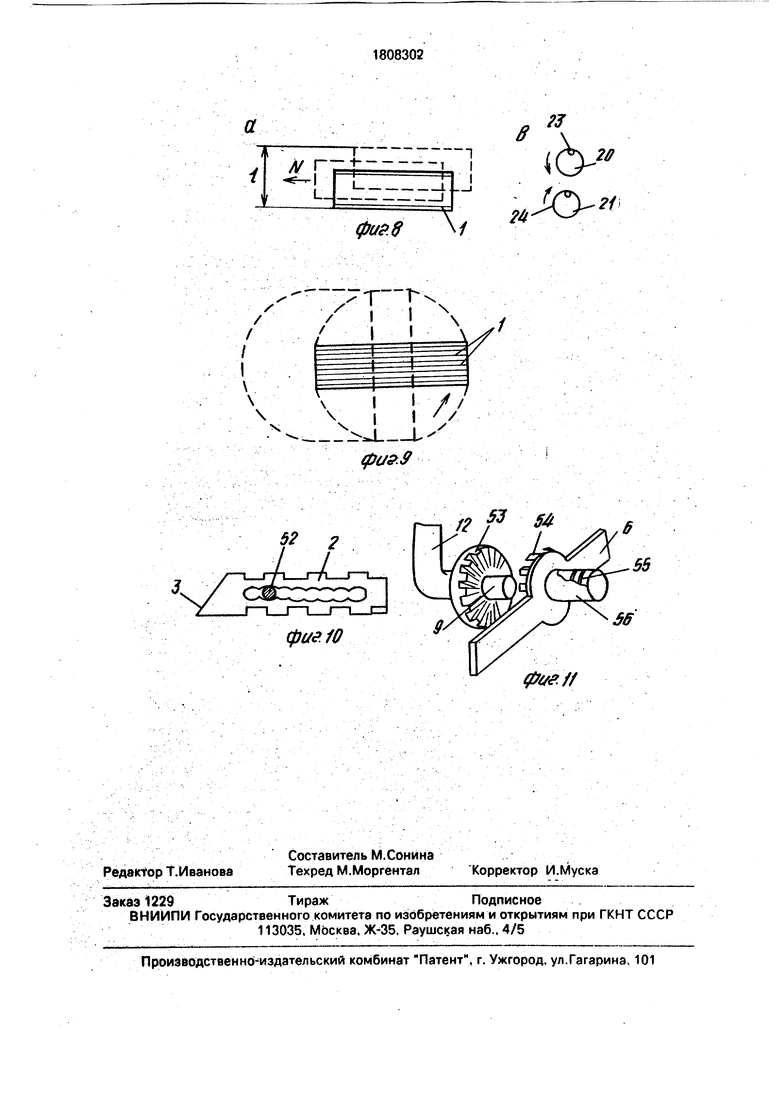
На фиг.1 показано устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг.З - пакет пластин, изометрический вид; на фиг. 4-пакетс изогнутыми пластинами; нафиг.5 - пакет с пластинами, имеющим криволинейные нижние кромки; на фиг.6 - устройство пластины с пилообразной нижней кромкой; на фиг.7 - схема вибрационного перемещения пластин под действием деба- лансов, вращающихся в противофазе; на фиг. 8 - схема вибрационного перемещения пластин под действием дебалансов, вращающихся со сдвигом взаимной фазы вращения на 180°; на фиг. 9 - схема перемещения пакета при вращении держателя; на фиг. 10 -устройство пазов и прорезей в пластинах; на фиг. 11 - устройство фиксатора углового расположения пакета относительно держателя.
Устройство для очистки поверхности выполнено следующим образом.
Пакет 1 рабочих элементов, выполненных в виде пластин 2 с режущими кромками 3, взаимно подпружиненных в поперечном направлении посредством упругих прокладок 4 и объединенных с помощью пружинящих стяжек 5 и обоймы 6. Последняя содержит углубления 7 и 8 по боковым граням пакета. В указанные углубления входят выступы 9 и 10 вилочного захвата 11.
Захват 11 состоит из двух рычагов 12 и 13, соединенных шарниром 14, обеспечивающим взаимный угловой поворот рычагов
со
с
со
§
со
о ю
со схождением и расхождением выступов 9 и 10 захвата, что вызывает боковое сжатие пакета пластин. Это необходимо и для монтажа и демонтажа пакета в захвате.
Фиксация пакета в держателе производится с помощью пружинящего фиксатора 15, включающего болтовое скрепление 16 и распорные пружины 17. Образованный таким образом фиксатор не препятствует виброперемещениям рычагов захвата, но в то же время обеспечивает удержание пакета 1 в захвате 11.
Для возбуждения виброколебаний рычагов 12 и 13 служат виброгенераторы, образованные в плоскости держателя 11 поворотными дебалансами 18 и 19. Они состоят из дисков 20 и 21 с отверстиями 22, в которых закрепляются дебалансовые грузы 23 и 24. Меняя их взаимное расположение путем постановки в различные отверстия можно добиваться различных траекторий виброперемещений рычагов 12 и 13.
В пакет 1 предусмотрена подача рабочей среды через патрубок 25, который сообщен с полостью 26, образованный в пакете. Рабочая среда выходит в зону обработки через неплотности в щели, выполненные для этой цели в зоне рабочих кромок пластин.
Привод генераторов колебаний образован двигателем-вращателем 27 выходной вал 28 которого соединен через упругую муфту с полуосью солнечного колеса 29 планетарного редуктора, корпус 30 которого пружинящими креплениями 31 и 32 закреплен на рачагах 12 и 13 вилочного захвата 11. Из корпуса 30 редуктора выведены два выходных вала 33 и 34 с противоположными направлениями вращения, которые через конические передатчики 35 и 36 сообщают вращение дискам 20 и 21. Противоположные направления вращения обеспечиваются наличием второго солнечного колеса 37, соединенного с первым колесом через паразитное колесо 38, закрепленное на корпусе. Сателлиты же 39 и 40 выходных валов 33 и 34 зацеплены с разными солнечными колесами, что и обеспечивает их противоположное вращение.
Вращатель 27 закреплен с возможностью вращений относительного корпуса 30 редуктора, Для этого образован подшипник вращения из опорных роликов 41. Для фиксации же двигателя-вращателя относительно корпуса служит винт 42. Имеется также фиксирующий винт 43, который используется для остановкйотносительно корпуса солнечного колеса 29. Если необходимо реализовать вращение вилочного захвата относительно вращателя, то с помощью винта 43 (путем его завинчивания) останавливают солнечное колесо 29. а винт 42 вывинчивают, освобождая для вращения корпус 30 редуктора. Если же необходимо использовать устройство только в режиме
вибраций, то винт 42 завинчен, а винт 43 вывинчен. Таким образом имеется первый и второй вариант подключения планетарной передачи к вращателю, что соответствует двум режимам работы устройства: режиму
вращения пакета на обрабатываемой поверхности и режиму вибровоздействия со снятием загрязненного слоя
Корпус вращателя 27 посредством демпфирующего фланцевого соединения 44 закреплен на водиле 45, плечи 46 и 47 которого соединены через снабженный фиксатором шарнир 48, что обеспечивает определенный наклон под углом а вилочного держателя 11 по отношению к пакету пластин.
Предусмотрен вариант формирования пакета, в котором выполнено чередование прямолинейных пластин 49 и волнообразно изогнутых пластин 50, возможно применение и только изогнутых пластин. Взаимная
фиксация пластин обеспечивается их соединением с помощью хомутов 51, либо посредством болтового соединения 52. Крепёжные элементы взаимодействуют с кромками прорезей и отверстий, которые могут располагаться распределение по длине пластин и, таким образом, допускать различные варианты соединения с различными внешними формами пакета пластин. В конструкции предусмотрена и возможность использования нижних кромок, верхних, задних кромок пластин, что достигается соответствующим закреплением в держателе 11.
Фиксация углового расположения пакета 1 в вилочном захвате 11 обеспечивается
изготовлением выступов 9 со специальными шлицевыми фланцами 53. которые взаимодействуют со шлицевыми дисками 54, выполненными на обойме 6. При необходимости исключения зацепления
шлицов ставятся дополнительные шайбы 55 в чашечки 56 обоймы 6. Фиксация угла / взаимного расположения захвата и пакета позволяет воздействовать на обрабатываемую поверхность 57 под заданным углом
(р с целью снятия загрязненного слоя 58.
Устройство для очистки поверхности работает следующим образом. В основном предусмотрено три режима работы устройства: режим вибрационного
воздействия при полном прилегании пакета нижней плоскостью (фиг.2, позиция в), режим вибрационного воздействия с прилеганием по лобовой режущей кромки (фиг.2 позиция с) и режим обработки путем вращения держателя (фиг.2 позиция а). Первый режим применяется для сплошной обработки поверхности со снятием слоя загрязнений, второй - для очаговой обработки с целью снятия особо прочных загрязнений, третий режим рекомендуется для чистовой обработки поверхностей - шлифовки. Возможны различные комбинации указанных основных режимов.
В первом основном режиме плоскость размещения вилочного захвата находится под некоторым углом к обрабатываемой поверхности 57, пакет 1 действует составляющая веса Р устройства и продольная сила N, передаваемая от механизма продвижения устройства через водило 45.
Устройство работает следующим образом.
При включении вращателя 27 под действием вращающихся дебалансов 18 и 19 рычаги 12 и 13 начинают сжимать и разжимать пакет пластин 1, При этом нижние кромки пластин будут воздействовать на поверхность и очищать ее. Кроме того, возникает горизонтальная составляющая вибрационных сил, связанная с наклонным размещением плоскости держателя, в которой вращаются дебалансы. Горизонтальная составляющая, направленная преимущественно вперед, будет вызывать воздействие пакета как резца с определенным углом заточки. Продвижение указанного резца, образованного пакетом пластин будет осуществлять снятие слоя загрязнений. При этом в зависимости от взаимного размещения дебалансов траектория перемещений пластин может видоизменяться.
Во втором режиме обработки (фиг.2 с) снятие особо прочных загрязнений достигается за счет концентрации виброимпульсов на весьма малой площади контакта, при этом можно варьировать угол воздействия на участок поверхности.
Реализация третьего режима проводится при расположении держателя под углом 90° по отношению к нижней плоскости пакета. Для проведения работ проводят подключение редуктора по ранее описанной первой схеме, то-есть останавливают колесо 29 фиксирующим винтом 43 и раскрепляют винт 42, закрепляющий вращатель на корпусе 30 планетарного редуктора.
Формула изобретения
1. Устройство для очистки поверхности, содержащее пакет рабочих элементов, закрепленных в держателе, выполненном в
виде вилочного захвата, связанного с приводом перемещения пакета, отличающееся тем, что, с целью расширения эксплуатационных возможностей, рабочие элементы выполнены в виде взаимно подпружиненных пластин с режущими кромками, рычаги захвата выполнены раздвижными и снабжены расположенными навстречу друг другу выступами, входящими с возможностью поворота и фиксации
в углубления по боковым граням пакета, привод перемещения содержит генераторы виброколебаний, расположенные на каждом рычаге в плоскости этого рычага.
2. Устройство поп.1,отличающее- с я тем, что пластины взаимно подпружинены посредством размещенных между ними упругих прокладок.
3. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что пластины выполнены упругими на изгиб и волнообразно изогнуты вдоль осей расположения.
4. Устройство поп. 1,отличающее- с я тем, что пластины выполнены со сквозными пазами и прорезями, расположенны- ми по их длине, и соединены посредством стяжных элементов, взаимодействующих с отдельными пазами или прорезями.
5. Устройство поп. 1,отличаю щее- с я тем, что оно имеет источник рабочей
среды, а пакет имеет полость, сообщенную с источником подачи рабочей среды, при этом пластины в пакете установлены с образованием между ними щели для выхода рабочей среды в зону обработки.
6. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что генераторы виброколебаний состоит из двигателя, на выходном валу которого размещено солнечное колесо, сателлитов, находящихся в зацеплении с этим
колесом, и двух поворотных дебалансов, кинематически связанных с осями сателлитов, при этом каждый из дебалансов размещен на одном из рычагов вилочного захвата. 7. Устройство по п. 6, о т л и ч а ю щ е ес я тем, что двигатель закреплен с возможностью вращения относительно вилочного захвата.
Г Й1
/I О ;
}
г t
0
itt &
D; &
&
/.епф
H
| название | год | авторы | номер документа |
|---|---|---|---|
| Моечная головка | 1984 |
|
SU1194518A1 |
| Установка для подводного бурения | 1986 |
|
SU1441048A1 |
| ВИБРОРАСКАЛЫВАТЕЛЬ | 2007 |
|
RU2355845C1 |
| Рабочий орган землеройной машины | 1978 |
|
SU751920A1 |
| ВРАЩАТЕЛЬ ДЛЯ БУРОВОГО СТАНКА | 1969 |
|
SU244978A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК УСТРОЙСТВ ВОЗБУЖДЕНИЯ ВИБРОКОЛЕБАНИЙ | 2007 |
|
RU2348024C2 |
| Печатающий узел устройства вывода информации | 1987 |
|
SU1549793A1 |
| Конусная инерционная дробилка с приспособлением для фиксации дебаланса | 2019 |
|
RU2724259C1 |
| Мотор-колесо | 2023 |
|
RU2816724C1 |
| Машина для сшивки сетных полотен | 1970 |
|
SU346965A1 |
Область использования: очистка от загрязнений поверхностей сложной формы. Сущность изобретения: устройство имеет рабочий орган, выполненный в виде пакета взаимно подпружиненных пластин с режущими боковыми кромками. Пакет имеет углубления по двум боковым поверхностям, в которые введены выступы рычагов вилочного захвата. Пакет из пластин фиксируется в вилочном захвате под определенным углом расположения. На каждой рычаге вилочного захвата имеется генератор для возбуждения поперечных и продольных колебаний пластин. Вилочный держатель укреплен на водиле, с помощью которого осуществляют продвижение пакета пластин к обрабатываемой поверхности, а также прижатие пластин. Последним в пакете придается форма резца для снятия слоя загрязнений с поверхности обрабатываемого изделия. 6 з.п.ф- лы, 11 ил.
9гп&
гглф
//////////////s///////////////////////////////////////////////////////////////////////////
1т г I..ftjr Л V -1..1 « ж-тт--: . ------ . tj (i.(j«(jf, .(r f fjf..f.
Jl MvVrr v -J-- -,1
Л
20C8081
а
/
X
.Л--t
:
в
Я
20
&
/
| СПОСОБ ОЧИСТКИ МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЕЙ ОБОРУДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2209853C2 |
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
