Изобретение относится к очистке внутренних поверхностей и может быть использовано для очистки пучков труб ретификационных колонн на предприятиях нефтехимической промышленности и теплообменников электростанций.
Целью изобретения является расширение технологических возможностей устройства за счет обеспечения очистки труб, расположенных под любым углом к горизонту, причем загрузка устройства может осуществляться с любого конца трубы при одновременном повышении надежности устройства за счет исключения системы управления и регулирования осевыми ходами шпинделя и подвода электропитания, что в конечном итоге повышает автономность устройства.
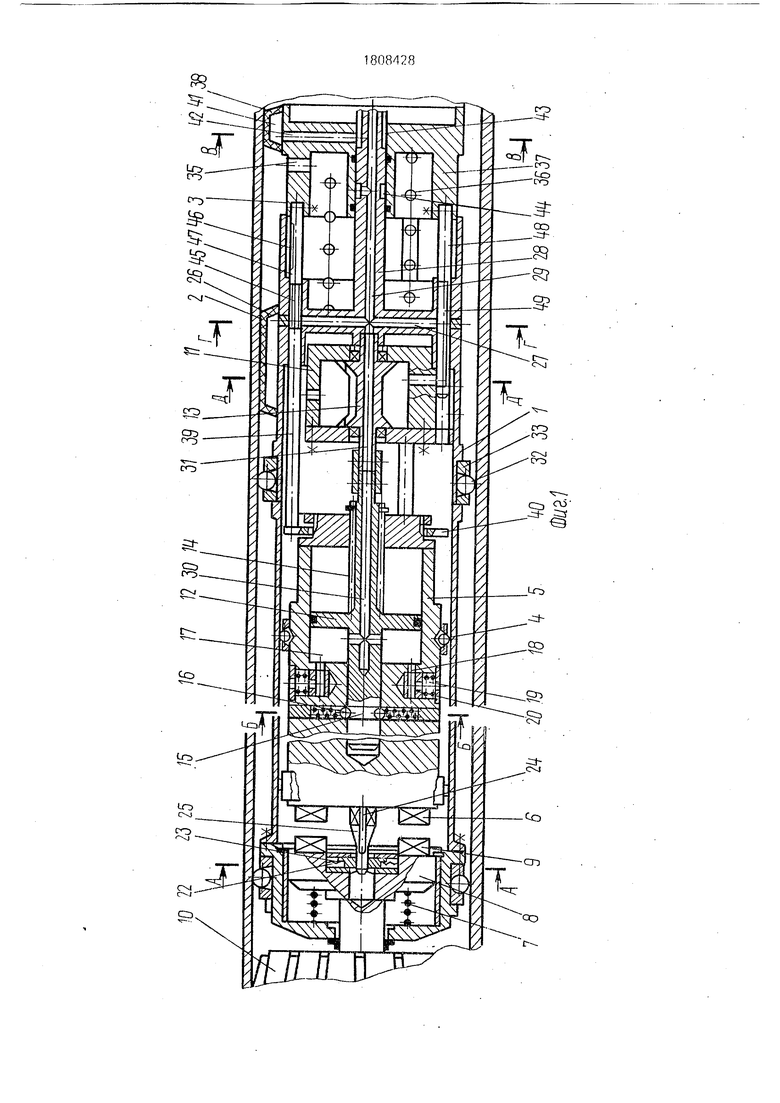
На фиг. 1 изображено устройство для очистки внутренней поверхности труб, продольный разрез; на фиг. 2 - разрез А-А на
фиг. 1; на фиг. 3 - разрез Б-Б на фиг.1: на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг.1.
Устройство содержит корпус 1 с прикрепленными к его поверхности эластичными оболочками 2, толкающий привод 3. установленный в корпусе 1 с возможностью осевого перемещения на подшипниках качения 4 маховик 5 с рабочими кулачками 6, подпружиненный пружиной 7 выходной шпиндель 8 с ответными кулачками 9, жестко связанный с рабочим инструментом, например, фрезой 10, привод вращения 11, механизм ударного сцепления маховика со шпинделем, выполненный в виде шток-поршня 12, жестко связанного с ротором 13 привода вращения 11 и образующего с маховиком подвижное шлицевое соединение 14, фиксируемое с помощью взаимодействующих с профильной канавкой 15 штока 12
00
о
00
4
ю
00
подпружиненных шариковых фиксаторов 16 и замкнутую камеру 17, связанную посредством каналов 18 и подпружиненных клапанов 19. размещенных в радиальных отверстиях маховика 5.и выполненных в виде центробежных грузов 20, с внутренней полостью корпуса 1.
Шпиндель 8 выполнен с радиальным пазом 21, с расположенными в нем и поджимаемыми пружинами 22 к центру шпинделя 8 пластинами 23, взаимодействующими с управляющими выступами 24 валика 25, маховика 5. Основные эластичные камеры 26 связаны посредством подводящих каналов
27 с выполненным в направляющем штоке
28 корпуса 1 каналом 29, с которым посредством каналов 30 и 31 связана камера 17.
Корпус 1 содержит самоцентрирующиеся опоры, выполненные в виде шариков 32, охваченных сепаратором 33, а внутренняя полость связана посредством отверстий 34 и 35 с атмосферой.
Толкающий привод 3 выполнен в виде подпружиненного относительно корпуса 1 пружиной 36 стакана 37 с расположенными на его поверхности эластичными оболочками 38, установленный в корпусе 1 с возможностью осевого перемещения и связанного посредством тяг 39, с кольцом 40, образующим с маховиком 5 подвижное соединение. Дополнительные эластичные камеры 41 попеременно связаны посредством каналов 42 с кольцевыми проточками 43 и 44, последняя из которых связана с каналом 29, причем тяги 39 выполнены с кольцевыми проточками 45 и выборками 46, разделенными цилиндрическими участками 47, а стержень 48 выполнен с выборкой 49.
Устройство работает следующим образом.
После установки устройства во внутреннюю полость трубы сжатый воздух через каналы 29 и 27 подается в основные эластичные камеры 26, тем самым фиксируя корпус 1 устройства относительно внутренней поверхности трубы. Одновременно с этим воздух через один из каналов 27 и выборку 49 стержня 48 подается на привод вращения 11, который начинает раскручивать маховик 5, при этом центробежные грузы 20 клапанов 19 отходят к периферии маховика, тем самым препятствуя выходу воздуха из замкнутой камеры 17, подающегося туда из канала 29 через каналы 30 и 31 шток-поршня 12 и ротора 13 привода вращения 11. Однако осевое перемещение маховика 5 становится возможным при достижении им заданной угловой скорости. при которой подпружиненные шариковые фиксаторы 16 под действием центробежных
сил перемещаются к периферии маховика 5. После срабатывания подпружиненных шариковых фиксаторов .16 маховик 5, связанный со шток-поршнем 12 посредством
шлицевого соединения 14, под действием сжатого воздуха, находящегося в замкнутой камере 17, начинает совершать осевое перемещение, втягивая при этом в корпус 1 стакан 37 и сжимая тем самым пружину 36.
Но дальнейшее поступательное перемещение маховика 5 окажется возможным лишь в .строго определенном относительном положении маховика 5 и шпинделя 8, когда рабочие кулачки 6 маховика 5 окажутся напротив рабочих кулачков 9 шпинделя 8. Это обеспечивается тем, что управляющие выступы 24, размещенные на торце валика 25 маховика 5, заходят в пространство между пластинами 23 и, при дальнейшем вращении маховика 24 отжимают пластины 23 к периферии радиального паза 21, сжимая пружины 22. В случае, если управляющие выступы 24 упираются в пластины 23, то при дальнейшем вращении они соскальзывают
в пространство между ними. При этом маховик 5 продолжает свое движение и рабочие кулачки 6 входят в пространство между рабочими кулачками 9 шпинделя 8. При дальнейшем вращении маховика 5 рабочие
кулачки 6 встречаются с рабочими кулачками 9 и передают накопленную маховиком кинетическую энергию посредством удара, после чего продолжают совместное осевое движение, сжимая пружину 7 и осуществляя
очистку внутренней (поверхности) полости трубы посредством рабочего инструмента 10, жестко связанного со шпинделем 8.
При подходе шпинделя 8 к крайнему положению на некоторую величину А прекращается подача сжатого воздуха на привод вращения 11 (воздух через выборку 49 стержня 48 сбрасывается во внутреннюю полость корпуса 1, и далее через отверстия 34 и 35 в трубу) и одновременно с этим
происходит запирание камер 26 цилиндрическими участками 47 тяг 39 (при этом длина участка 47 меньше величины А). Процесс очистки при этом продолжается, угловая скорость маховика 5 и шпинделя 8 подают,
но осевое движение продолжается и кольцевая проточка 44 начинает совмещаться с каналом 29, тем самым подавая сжатый воздух по каналам 42 IB дополнительные эластичные камеры 41. В этот момент фиксация корпуса 1 осуществляется еще камерами 26). При дальнейшем осевом движении выборки 46 тяг 39 начинают совмещаться с каналами 27 и одновременно с началом сброса воздуха из камер 26 через эти выборки прекращается наполнение камер 41, т.е. происходит фиксация стакана 37 толкающего привода 3 относительно внутренней поверхности трубы. Маховик 5 достигает при этом крайнего положения и останавливается, центробежные грузы 20 клапанов 19 возвращаются в исходное положение и воздух из камеры 17 сбрасывается через каналы 18 и клапаны 19 во внутреннюю полость корпуса 1 и затем через отверстия 34 и 35 в трубу.
Пружина 7 вернет шпиндель 8 в исходное положение, а пружина 36 протолкнет корпус 1 вперед на величину очищенной поверхности.
При этом по мере осевого перемещения корпуса 1 начнется подача воздуха через выборку 49 стержня 48 на привод 11, т.е. начнется раскрутка маховика 5 и при совмещении (по мере продвижения корпуса 1) каналов 27с кольцевыми проточками 45 тяг 39 начнется заполнение воздухом камер 26. При этом тяги 39 и стержень 48,связанные со стаканом 37, остаются неподвижными. Причем камеры 26 окажутся заполненными воздухом (т.е. произойдет фиксация корпуса 1 относительно внутренней поверхности трубы) в момент совмещения каналов 42 с кольцевой проточкой 43, начнется сброс давления из камер 41, маховик 5 получит возможность осевого перемещения и весь цикл работы устройства повторяется.
Предлагаемое устройство для очистки внутренней поверхности труб найдет применение для очистки прямолинейных труб малого диаметра расположенных под углом к линии горизонта при одновременном повышении надежности устройства.
Формула изобретения
Устройство для очистки внутренней поверхности труб, содержащее полый корпус со средством его шагового перемещения, имеющим установленные последовательно два ряда эластичных камер с распределительной системой рабочего агента, первый из которых установлен на корпусе, отличающееся тем, что оно снабжено установленными на корпусе самоцентрирующими шаровыми опорами, установленными в полости корпуса с возможностью осевого перемещения посредством подшипников качения, маховиком с.рабочими кулачками и валиком с выступами на его переднем торце, а также замкнутой камерой на заднем торце, подпружиненным относительно передней части корпуса выходным шпинделем с кулачками, с подпружиненными в радиальном пазу шпинделя для взаимодействия соответственно с кулачка- 5 ми и выступами валика маховика и с рабочим инструментом, например фрезой, на свободном конце шпинделя с приводом вращения в виде ротора, механизмом ударного сцепления маховика и шпинделя, выпол0 ненным в виде установленного в замкнутой камере маховика штока-поршня с осевым каналом и канавкой на конце, взаимодействующего с маховиком посредством подвижного шлицевого соединения, фиксируемого
5 с помощью взаимодействующих с канавкой штока подпружиненных шариковых фиксаторов, образованного штоком и задним торцом маховика, на свободном конце которого жестко закреплен ротор привода вращения,
0 причем замкнутая камера выполнена с каналами и снабжена подпружиненными клапанами, выполненными в виде центробежных грузов для сообшзния ее полости с полостью корпуса, при этом устройство снабже5 но толкающим приводом, выполненным в виде связанного с хвостовиком ротора направляющим корпус штоком корпуса с осе- . вым каналом, сообщающимся с осевым каналом, штока поршня, установленного на
0 направляющем штоке подпружиненного стакана, смонтированного на замкнутой камере маховика кольца, и связанным с ним одним концом тяг, второй конец которых связан со стаканом, на поверхности которо5 го установлен второй ряд эластичных камер, связанных посредством каналов с распределительной системой направляющего штока корпуса, выполненной в виде последовательных кольцевых проточек, од0 на из которых сообщается с осевым каналом направляющего штока, сообщающимся с первым рядом эластичных камер и полостью ротора привода вращения причем ста- кан имеет стержень с продольной
5 выборкой, установленный в продольном отверстии корпуса привода вращения для сообщения полости ротора привода вращения с полостью корпуса устройства, а тяги выполнены разделенными цилиндрическими
0 участками кольцевыми проточками и выборками, которые поочередно соединяют первый ряд эластичных камер с осе-вым каналом направляющего штока и полостью корпуса устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки внутренней поверхности трубы | 1988 |
|
SU1632526A1 |
| ДВИГАТЕЛЬ-ПРЕОБРАЗОВАТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2067196C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ОСЕВОЙ НАГРУЗКИ НА ДОЛОТО | 1994 |
|
RU2116429C1 |
| Устройство для крепления инструмента в шпинделе станка | 1984 |
|
SU1724442A1 |
| Защитный автоматический клапан | 2021 |
|
RU2753787C1 |
| Машина для внутрипочвенного внесения жидких удобрений | 1988 |
|
SU1644768A1 |
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО БУРОВОГО ИНСТРУМЕНТА ДЛЯ СЕЛЕКТИВНОГО ВХОДА В БОКОВОЙ СТВОЛ | 2017 |
|
RU2657583C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Устройство для отворачивания бурильных труб в скважине | 1986 |
|
SU1315599A1 |
| Гидромонитор для очистки литья | 1988 |
|
SU1616774A1 |

Использование: очистка полости труб, например, ретификационных колонн на предприятиях нефтехимической промышленности. Сущность изобретения: устройство содержит корпус, выходной шпиндель с рабочим инструментом, связанный с корпусом привод вращения. Маховик кинетически связан с приводом и установлен с возможностью вращения и осевого перемещения относительно корпуса. Механизм ударного сцепления кулачков имеет маховик с кулачками, шпиндель. Корпус снабжен прикрепленными к его наружной поверхности эластичными камерами. Толкающий привод выполнен в виде стакана с расположенными на его поверхности эластичными камерами. 6 ил.
| Самоходное устройство для перемещения в трубопроводе | 1974 |
|
SU588024A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
