Изобретение относится к области машиностроения приводов с повышенными требованиями к уровню вибрации их корпусов.
Цель изобретения состоит в уменьшении интенсивности колебаний привода путем уравновешивания реактивного момента.
На фиг. 1-3 изображены варианты компоновочной схемы устройства, общий вид, разрез.
Привод содержит корпус 1, установленные в нем два соосных вала 2,3 с соответственно ведущим и ведомым элементами. Ведущим элементом является ротор приводного электродвигателя 4, а ведомым элементом .может быть, например, механизм поршневого компрессора. Валы 2,3 кинематически соединены с возможностью противоположного вращения передачей в виде размещенных на обращенных друг к другу консолях валов 2, 3 колес 5, 6, связанных между собой сателлитами 7. При этом колесо 5 имеет рабочую наружную коническую поверхность, а колесо 6 - рабочую внутреннюю коническую поверхность. Кинематическая связь колес 5 и 6 обеспечивается за счет фрикционного контакта с сателлитами 7, профиль которых в осевом сечении очерчен по дугам окружности. На консолях валов 2, 3 установлен упругий элемент для соединения соосных валов 2, 3 с колесами 5 и 6, выполненный в виде винтовых пружин сжатия 8 и 9, обеспечивающих осевое нагруже- ние колес и соответственно замыкание кинематических пар фрикционной передачи. При этом на фиг.1 изображен вариант привода, в котором обе пружины 8,9 своими концами соединены соответственно с валами 2, 3 и колесами 5 и;6, установленными на валах 2, 3 с возможностью осевого и окружного перемещения, относительно консолей. .
На фиг.2 - вариант привода, в котором одна из пружин, например 8, соединена жестко своими концами с валом 2 и. колесом 5, а колесо б соединено с валом 3 скользящим шпоночным или шлицевым соединением 10.
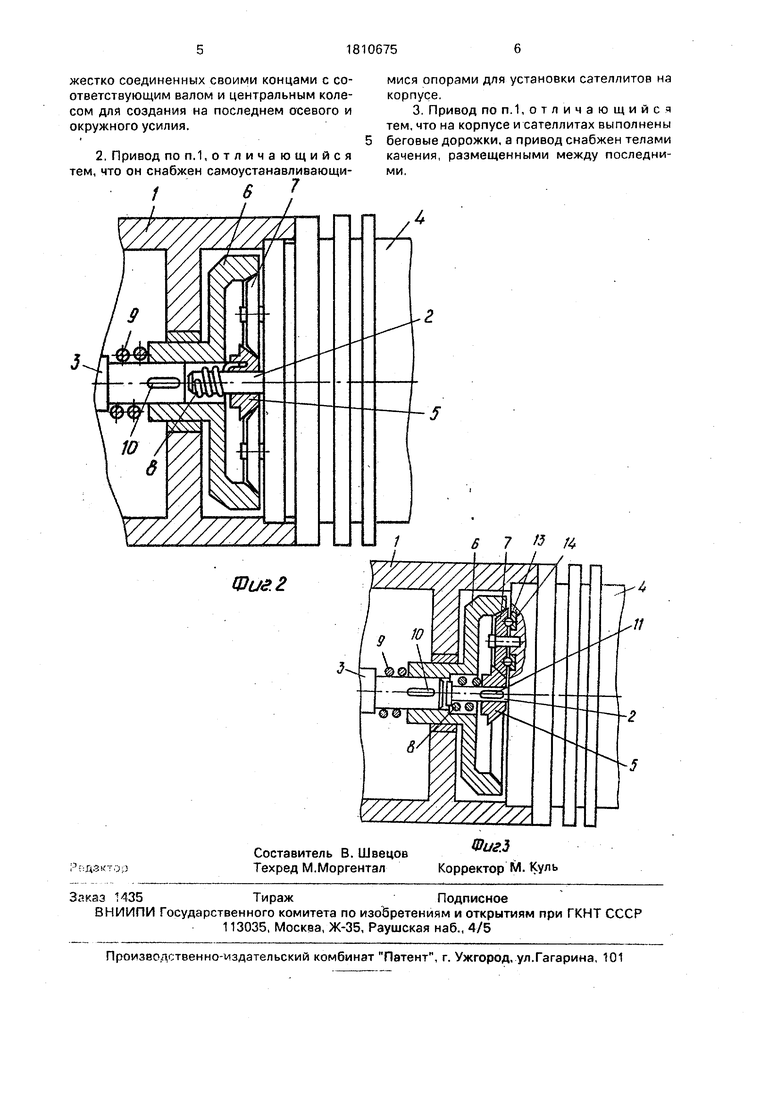
На фиг.З - вариант привода, в котором колеса 5 и б соединены с валами 2 и 3 скользящими шпоночным или шлицевыми соединениями 11 и 10, исключающими перемещение колес 5 и б относительно валов 2 и 3 в окружном направлении.
Опоры 12 сателлитов 7 выполняются самоустанавливающимися.
При значительных осевых усилиях на сателлиты 7 возможен вариант с размещением тел качения 13 сателлитами 7 и корпусом электродвигателя 4, причем торцы сателлитов 7 и корпуса электродвигателя 4 снабжаются беговыми дорожками 14.
Привод работает следующим образом,
При вращении ведущего элемента (ротора электродвигателя 4) вал 3 с ведомым элементом вращается в противоположную сторону, что обеспечивается схемой редуктора. Угловые ускорения ведущего и ведо0 мого элементов, наиболее нагруженных инерционно, направлены в противоположные стороны, что способствует снижению угловых колебаний корпуса 1. Подбирая крутильную жесткость винтовых пружин и мо5 менты инерции ведущего и ведомого элементов, обеспечивают такое соотношение упомянутых угловых ускорений и соответствующую величину реактивного момента сил на корпусе 1, при которых уро0 вень угловых колебаний последнего минимален.
При этом в случае, если коэффициенты крутильной жесткости упругих элементов принимаются равными бесконечности, ко5 леса 5 и б соединяются с валами 2 и 3 скользящими шпоночными или шлицевыми соединениями.
Осевое усилие сжатия пружины рассчитывается с ориентацией на максимальную
0 величину крутящего момента на колесах редуктора с учетом обеспечения необходимого фрикционного контакта.
Формула изобретения
1. Привод вращения, содержащий кор5 пус, установленные в нем ведущий и ведомый элементы с соосно расположенными консольными ведущим и ведомым валами соответственно, соединяющую валы планетарную фрикционную передачу, состоящую
0 из размещенного на консоли одного из валов центрального колеса наружного зацепления, .центрального колеса внутреннего зацепления и взаимодействующих с ними сателлитов, и упругий элемент, о т л и ч а5 ю щ и и с я тем, что, с целью уменьшения интенсивности колебаний привода путем уравновешивания реактивного момента, центральное колесо внутреннего зацепления установлена на консоли другого вала с
0 возможностью осевого и окружного перемещения, центральное колесо наружного зацепления установлено с возможностью осевого и окружного перемещения, сателлиты расположены на корпусе, рабочая по5 верхность центральных колес выполнена конической, рабочая поверхность сателлитов в осевом сечении очерчена дугой окружности, упругий элемент выполнен в виде двух пружин сжатия - кручения, размещенных на соответствующих консолях валов и
жестко соединенных своими концами с соответствующим валом и центральным колесом для создания на последнем осевого и окружного усилия.
2. Привод по п. 1,отличающийся тем, что он снабжен самоустанавливающив
/
/
/ /
мися опорами для установки сателлитов на корпусе.
3. Привод по п. 1,отличающийся тем, что на корпусе и сателлитах выполнены беговые дорожки, а привод снабжен телами качения, размещенными между последними.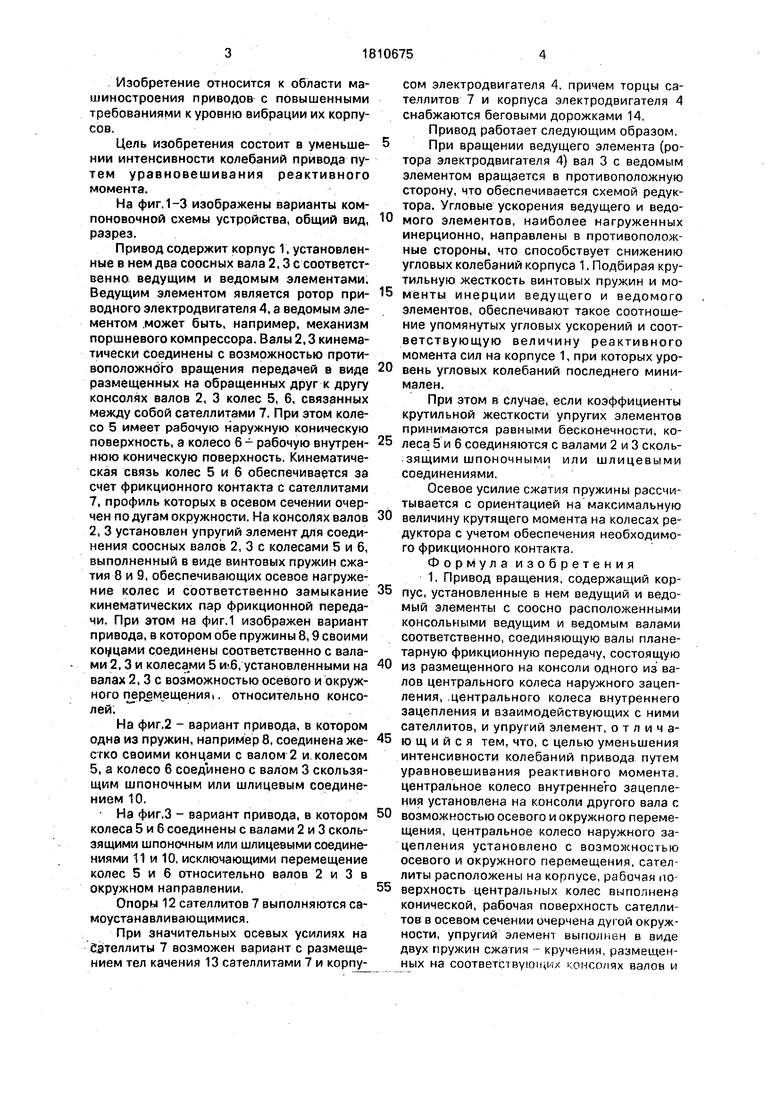
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод вращения | 1988 |
|
SU1634869A1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |
| Динамическая муфта | 1978 |
|
SU949239A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| РЕДУКТОР | 1994 |
|
RU2049285C1 |
| УСТРОЙСТВО ДЛЯ АБРАЗИВНОЙ ОБРАБОТКИ И ЧИСТКИ ПОВЕРХНОСТЕЙ | 1993 |
|
RU2046695C1 |
| ПЛАНЕТАРНО ЛОБОВОЙ ВАРИАТОР | 2013 |
|
RU2550928C2 |
| МЕХАНИЗМ ПОВОРОТА | 1994 |
|
RU2083474C1 |
| Вариатор скорости | 1991 |
|
SU1796824A1 |
Использование: машиностроение, малогабаритные приводы с повышенными требованиями к уровню вибрации их корпусов. Сущность изобретения: привод содержит корпус (1), установленные в нем два соосных вала (2) и (3), которые кинематически соединены с возможностью противоположного Г 5 вращения передачей в виде колес (5) и (6), связанных между собой сателлитами (7). При этом колесо (5) имеет рабочую наружную коническую поверхность, а колесо (6) - рабочую внутреннюю поверхность, которые входят во фрикционный контакт с поверхностью сателлитов (7), профиль которых в осевом сечении очерчен другой окружности. Силовое замыкание кинематических пар обеспечивается винтовыми пружинами (8.9) сжатия, установленными на валах (2, 3). Путем подбора крутильной жесткости пружин (8, 9) и моментов инерции колес (5, 6) с валами (2, 3).достигается создание уравновешивающего инерционного момента, обеспечивающего минимизацию суммарного реактивного момента на корпусе машины. В результате угловые колебания, корпуса в низкочастотном спектре частот уменьшаются. 3 ил. 7 /2 V////S;,, I Н ММ
| Планетарный фрикционный вариатор | 1979 |
|
SU950985A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Привод вращения | 1988 |
|
SU1634869A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Руденко Н.Ф | |||
| Планетарные передачи.- М.- Л.: Машгиз, 1947, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
