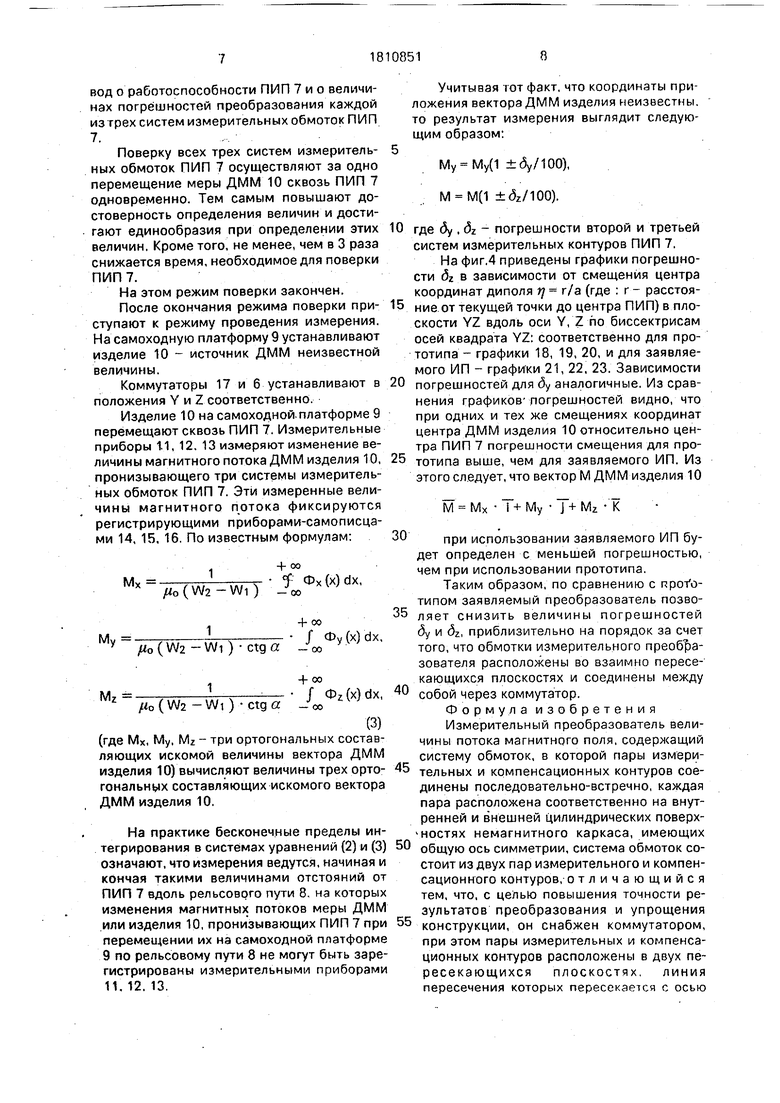
Первая пара обмоток 1 и 2 лежит в первой плоскости, а вторая пара обмоток лежит во второй плоскости. Линия пересечения этих двух плоскостей образует воображаемую ось О О. Расположим декартовую систему координат XYZ в центре оси О О так, чтобы ось Y совпадала с осью О О, а плоскость YZ делила двугранный угол двух плоскостей пополам и образовывала с ними угол а,
Измерительные обмотки ИП расположены на немагнитном каркасе 5. Внутренняя и внешняя поверхности каркаса 5 являются частями цилиндрических поверхностей с общей осью симметрии ОХ. Образующие цилиндрических поверхностей каркаса 5 могут иметь форму круга, эллипса, а также многоугольника, вписанного в круг или эллипс, с числом сторон 2п(где п 2,3,4...).
Обмотки 1, 3 лежат на внутренней, а обмотки 2, 4 - на внешней цилиндрических поверхностях немагнитного каркаса 5.
На каркасе 5 расположен коммутатор 6,
В системе обмоток (см.. фиг.2) измерительные обмотки первой пары - 1 и 2 соеди- нены между собой последовательно и встречно. Измерительные обмотки второй пары - 3 и 4 также соединены между собой последовательно и встречно. Один конец провода первой пары измерительных обмоток соединен с коммутатором 6, а два конца провода второй пары измерительных обмоток также соединены с коммутатором 6. Свободные концы провода первой пары системы измерительных обмоток и провод от коммутаторов образуют выход системы измерительных обмоток. Выход системы измерительных обмоток соединен со входом измерительного прибора (на фиг.2 не показан). Коммутатор 6 имеет два положения X и Z. При нахождении коммутатора б в положении X начало измерительной обмотки 2 соединено через коммутатор 6 с началом измерительной обмотки 4, а начала измерительных обмоток 1 и 3 (через коммутатор 6) образуют выход системы обмоток. При нахождении коммутатора 6 в положении X начало измерительной обмотки 2 соединено через коммутатор 6 С началом измерительной обмотки 3, а начала измерительных обмоток 1 и 4 (через коммутатор 6) образуют выход системы обмоток.
Заявляемый измерительный преобразователь конструктивно может быть выполнен следующим образом.
Каркас 5 ИП изготовлен, например, из стеклотекстолита, кварца, дерева и прочих немагнитных материалов и их сочетаний. Измерительные обмотки 1-4 намотаны медным или алюминиевым проводом с изоляционным покрытием. Измерительные обмотки 1-4 фиксируются на каркасе 5, например, с помощью клея или крепежных скоб (на
фиг.1 не показаны). Коммутатор 6 может быть любым коммутирующим устройством, например, двухпозиционным переключателем и располагаться на каркасе 5 ИП (см, фиг.1) либо вне его. Измерительный
прибор, к которому подключен выход системы измерительных обмоток, - микровебер- метр, например Ф191 или Ф199.
Геометрические размеры и числа витков в измерительных обмотках ИП, а также угол
а. выбирают из предполагаемых наибольших поперечных размеров исследуемого объекта и ожидаемой величины его ДММ, а также типа применяемых измерительных приборов.
в случае, если цилиндрические поверхности ИП имеют .образующими квадраты со сторонами 2а и 2а Ј (где Ј 1), то числа витков в измерительных обмотках ИП должны удовлетворять условиям:
Wi Wa |2 W2 I2 W4, Wi 81
W2 S2, W3 S3 W4 ;S4,
Фтах
Wi
4л:
1 -sin За //о
35
а(Ј2-1)
8MzsinaVl +Sin la
(0.
где Wi - числа витков в i-й измерительной обмотке,
Si - площадь, ограниченная средней линией 1-й обмотки,
2а - сторона образующей внутреннего квадратного цилиндра системы измерительных обмоток,
4 JT 10 Гн/м - магнитная постоянная,
Mz - ожидаемая величина составляющей вектора ДММ (А м2), параллельной оси
При выводе формул (1) допускалось, что толщина измерительной обмотки много меньше стороны квадрата образующей цилиндрической поверхности.
В состав стенда измерения ДММ (см.
фиг.З) входит ПИП 7. В состав ПИП входят три системы измерительных обмоток для определения продольной Мх(параллельной оси X), поперечной Му (параллельной оси Y) и вертикальной Mz параллельной оси Z) составляющих вектора ДММ. Первая система
измерительных обмоток для определения Мх идентична первой измерительной системе прототипа и содержит две обмотки с числом витков Ws, We. Расположена она в плоскости YZ и ее геометрический центр совпадает с центром системы координат (см. фиг.1). Вторая система измерительных обмоток для определения My идентична заявляемому ИП (см. фиг.1) но развернута в пространстве вокруг оси X на 90° и ее геометрический центр совпадает с центром системы координат (см. фиг, 1). Третья система измерительных обмоток для определения Mz представляет собой заявляемый ИП. Параллельно оси X сквозь ПИП 7 проходит рельсовый путь 8, по которому на самоходной платформе 9 сквозь ПИП 7 перемещают источник ДММ 10(меруДММ или исследуемый объект) с компонентами вектора ДММ MX, My, Mz. Выходы трех систем измерительных обмоток подключены ко входам измерительных приборов 11, 12, 13, результаты измерений которых регистрируют самописцы 14, 15, 16 (соответственно). Вторая система измерительных обмоток ПИП 7 соединена (аналогично заявляемэму ИП) с измерительным прибором 12 через коммутатор 17, который имеет положение X и Y (соответствующее Z у заявляемого ИП).
В качестве самописцев 14, 15, 16 могут использоваться любые самописцы с непрерывной записью на диаграммной ленте, например, КСП-4.
Заявляемое устройство работает следующим образом,
ПИП имеет два режима работы: первый - режим поверки ПИП, второй режим измерений.
В режиме поверки ПИП происходит проверка работоспособности и результатов преобразования всех трех измерительных систем, входящих в ПИП 7, одновременно путем определения величины ДММ меры 10 и сравнением результатов с паспортными данными меры ДММ.
В режиме измерения происходит определение вектора ДММ исследуемого объекта 10.
Рассмотрим работу ПИП 7 с входящим в его состав заявляемым ИП в режиме поверки.
В режиме поверки коммутаторы 17 и 6 (см. фиг.2 и фиг.З) устанавливают в положение X, На самоходную платформу 9 (см. фиг.З) устанавливают меру ДММ 10 так, чтобы ось меры совпадала с осью X ПИП. В этом случае компоненты вектора ДММ меры будут
МХ М, Му 0, М,. -0.
Меру ДММ 10 на самоходной платфор ме 9 перемещают сквозь ПИП 7. Измери тельные приборы 11, 12, 13 измеряют изменение величины магнитного потока меры ДММ 10, пронизывающего три системы измерительных обмоток ПИП 7. Эти измеренные величины магнитного потока фиксируются регистрирующими приборами -- самописцами 14, 15, 16. По известным формулам находят
1
+ 00
//o(W6-W5) -Л
/ Ox(x)dx,
15
MyaB.2Mwl-Wt) -,/, М)
М2
(Wi-Wl) -Уда
+ 00
/ Oz(x)dx,
(2)
где//о 4 л Гн/м - магнитная посто- янная,
Ws, We - число витков в измерительных обмотках первой системы измерительных обмоток ПИП 7 (соответствуют Wi и W2 прототипа), на практике целесообразно лри- нять Ws Wi, We W2,
Фх(х), Фу(х), Фг(х)- измеренные измерительными приборами 11, 12, 13 величины магнитного потока меры ДММ 10 (Вб),
Мх, My, Mz - три значения компонент магнитного момента меры ДММ 10, определенные с помощью первой, второй и третьей систем измерительных обмоток ПИП 7.
Величины Мх, Му, Mz сравнивают с паспортной величиной ДММ меры и вычисляют
погрешность преобразования для каждой
из трех систем измерительных обмоток ПИП
7.
4
мх -м
М
100%
50
му. 100%
100% м
где 5х , 5у , дг - относительные погрешности преобразования,
М - паспортное значение величины ДММ меры 10.
Из анализа величин (5х , 5у, дг и сравнения их с заданными для ПИП делается вывод о работоспособности ПИП 7 и о величинах погрешностей преобразования каждой из трех систем измерительных обмоток ПИП 7...... - . .
Поверку всех трех систем измерительных обмоток ПИП 7 осуществляют за одно перемещение меры ДММ 10 сквозь ПИП 7 одновременно. Тем самым повышают достоверность определения величин и достигают единообразия при определении этих величин. Кроме того, не менее, чем в 3 раза снижается время, необходимое для поверки ПИП 7.
На этом режим поверки закончен.
После окончания режима поверки приступают к режиму проведения измерения. На самоходную платформу 9 устанавливают изделие 10 - источник ДММ неизвестной величины.
Коммутаторы 17 и 6 устанавливают в положения Y и Z соответственно.
Изделие 10 на самоходной.платформе 9 перемещают сквозь ПИП 7. Измерительные приборы 1.1, 12. 13 измеряют изменение величины магнитного потока ДММ изделия 10, пронизывающего три системы измерительных обмоток ПИП 7. Эти измеренные величины магнитного потока фиксируются регистрирующими приборами-самописцами 14, 15, 16. По известным формулам:
1
+ 00
Jlo(W2-Wl) Joo
f Ox(x)dx,
Mv
0(W2 -Wi) ctga oo
+ 00
/ cDy.Mdx,
M
/Лэ ( Wa - Wi ) ctg a oo
+ 00
/ Oz(x)dx,
(3)
(где MX, My, Mz - три ортогональных составляющих искомой величины вектора ДММ изделия 10) вычисляют величины трех ортогональных составляющих искомого вектора ДММ изделия 10.
На практике бесконечные пределы интегрирования в системах уравнений (2) и (3) означают, что измерения ведутся, начиная и кончая такими величинами отстояний от ПИП 7 вдоль рельсового пути 8, на которых изменения магнитных потоков меры ДММ или изделия 10, пронизывающих ПИП 7 при перемещении их на самоходной платформе 9 по рельсовому пути 8 не могут быть зарегистрированы измерительными приборами 11. 12. 13.
Учитывая тот факт, что координаты приложения вектора ДММ изделия неизвестны. то результат измерения выглядит следующим образом:
Му Му(1 ± 5у/100),
М М(1 ± 5Z/100).
где 5у , 5Z - погрешности второй и третьей систем измерительных контуров ПИП 7.
На фиг.4 приведены графики погрешности дг в зависимости от смещения центра координат диполя ц г/а (где : г - расстоя. ние от текущей точки до центра ПИП) в плоскости YZ вдоль оси Y, Z по биссектрисам осей квадрата YZ: соответственно для прототипа- графики 18, 19, 20, и для заявляемого ИП - графики 21, 22, 23. Зависимости
погрешностей для 5у аналогичные. Из сравнения графиков1 погрешностей видно, что при одних и тех же смещениях координат центра ДММ изделия 10 относительно центра ПИП 7 погрешности смещения для прототипа выше, чем для заявляемого ИП. Из этого следует, что векторМ ДММ изделия 10
М Мх Т+ Му 7+ М2 К
при использовании заявляемого ИП будет определен с меньшей погрешностью, чем при использовании прототипа.
Таким образом, по сравнению с rcpofo- типом заявляемый преобразователь позво
ляет снизить величины погрешностей
(5У и 5Z, приблизительно на порядок за счет того, что обмотки измерительного преобразователя расположены во взаимно пересекающихся плоскостях и соединены между
собой через коммутатор.
Формула изобретения Измерительный преобразователь величины потока магнитного поля, содержащий систему обмоток, в которой пары измерительных и компенсационных контуров соединены последовательно-встречно, каждая пара расположена соответственно на внутренней и внешней цилиндрических поверхностях немагнитного каркаса, имеющих
общую ось симметрии, система обмоток состоит из двух пар измерительного и компенсационного контуров, отличающийся тем, что, с целью повышения точности результатов преобразования и упрощения
конструкции, он снабжен коммутатором, при этом пары измерительных и компенсационных контуров расположены в двух пересекающихся плоскостях, линия пересечения которых пересекается с осью
симметрии цилиндрических поверхностей немагнитного каркаса под прямым углом, немагнитный каркас и упомянутые контуры расположены так. что проекция оси симметрии цилиндрических поверхностей немагнитного каркаса на каждую плоскость, в которой они расположены, образуют равные углы с этой осью, а первая пара измерительного и компенсационного контуров, расположенных в одной плоскости, соединена последовательное второй парой измерительного и компенсационного контуров, расположенных в другой плоскости, через коммутатор.


| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 1998 |
|
RU2153648C2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2516915C2 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК | 1971 |
|
SU294074A1 |
| Устройство для измерения параметров магнитного поля изделий | 1984 |
|
SU1285415A1 |
| Датчик магнитного азимута | 1990 |
|
SU1760325A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СЛАБОГО МАГНИТНОГО ПОЛЯ В НИЗКОТЕМПЕРАТУРНОЙ МАГНИТОАКТИВНОЙ ПЛАЗМЕ | 2018 |
|
RU2700287C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| Устройство для поверки тесламетров и мер магнитной индукции | 1980 |
|
SU928270A1 |
| Устройство для поверки магнитных компараторов постоянного тока | 1990 |
|
SU1798747A1 |


Применение: область измерительной техники, является чувствительным элементом магниточувствительных приборов и может быть использовано в устройствах для измерения изменяющихся величин. Суть изобретения: измерительный преобразователь величины потока магнитного поля, содержащий систему обмоток, в которой пары измерительных и компенсационных контуров соединены последовательно - встречно, Предполагаемое изобретение относится к области измерительной техники, является чувствительным элементом магни- тоизмерительных приборов и может быть использовано в устройствах для измерения изменяющихся магнитных величин. Целью предполагаемого изобретения является повышение точности результатов преобразования и упрощение конструкции ПИП. На фиг.1 изображён заявляемый ИП: на фиг.2 изображена принципиальная схема соединения измерительных контуров ИП; на фиг.З изображен общий вид стенда измекаждая пара расположена соответственно на внутренней и внешней цилиндрических поверхностях немагнитного каркаса, имеющих общую ось симметрии, система обмоток состоит из двух пар измерительного и компенсационного контуров, снабжен коммутатором при этом пары измерительных и компенсационных контуров расположены в двух пересекающихся плоскостях, линия пересечения которых пересекается с осью симметрии цилиндрических поверхностей немагнитного каркаса под прямым углом, немагнитный каркас и упомянутые контура расположены так, что проекции оси симметрии цилиндрических поверхностей немагнитного каркаса на каждую плоскость в которой они расположены, образуют равные углы с этой осью, а первая пара измерительного и компенсационного контуров, расположенных в одной плоскости, соединены последовательно со второй парой измерительного и компенсационного контуров, расположенных в другой плоскости через коммутатор. 4 ил. рения ДММ, с входящим в его состав ПИП, укомплектованным заявляемыми ИП. На фиг.4 приведены графики погрешности определения поперечной составляющей ДММ, обусловленной смещением центра ДММ относительно центра ИП для заявляемого ИП и прототипа. Заявляемый измерительный преобразователь (см, фиг.1) содержит измерительные обмотки 1. 2, 3, 4, содержащие Wi. W:. Wa, АЛ/4 витков соответственно. Все измерительные обмотки ИП выполнены плоскими, т.е. средняя линия каждой обмотки лежит в плоскости. 00 о 00 ел
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Характеристики магне- тине ферромагнитных масс | |||
| Методы измерений | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
