Известны двухкоординатные датчики, содержащие восьмистержневой магнитоировод статора с расположенными на нем обмоткой возбуждения и сигнальной обмоткой и ротор, выполненный в виде шарового сегмента.
Предлагаемый датчик отличается от известных тем, что в нем на магиитопроводе статора по каждой координате размещена обмотка управления, выполненная в виде двух включенных последовательно и встречно катушек, каждая из которых охватывает крайний и ближайший средний стержни магнитоировода, а ротор, диаметр основания которого равен расстоянию между осями симметрии противолежащих крайних стержней, имеет оксиальную канавку, внешний диаметр которой равен расстоянию между серединами промежутков крайних и средних стержней, а внутренний диаметр - расстоянию между серединами средних стержней, при этом на сферической поверхности этого сегмента закреплен немагнитный электропроводящий слой.
Это позволяет получить на выходе одновременно сигнал, пропорциональный углу поворота ротора, и приложить к ротору момент, пропорциональный величине и фазе напряжения управления.
Кроме того, с целью исключения смещения осей приложения момента при вращающемся роторе последовательно с обмоткой управления каждой координаты датчика включены две одинаковые носледовательно соединенные обмотки, расположеппые в плоскости другой координаты.
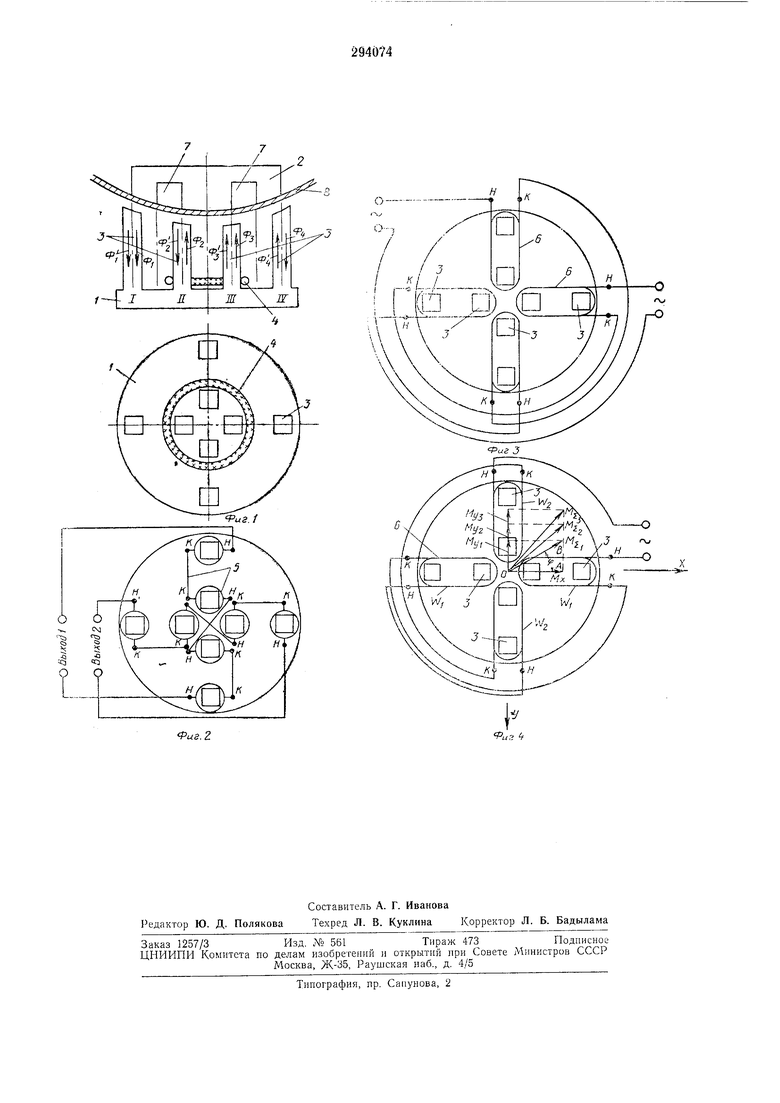
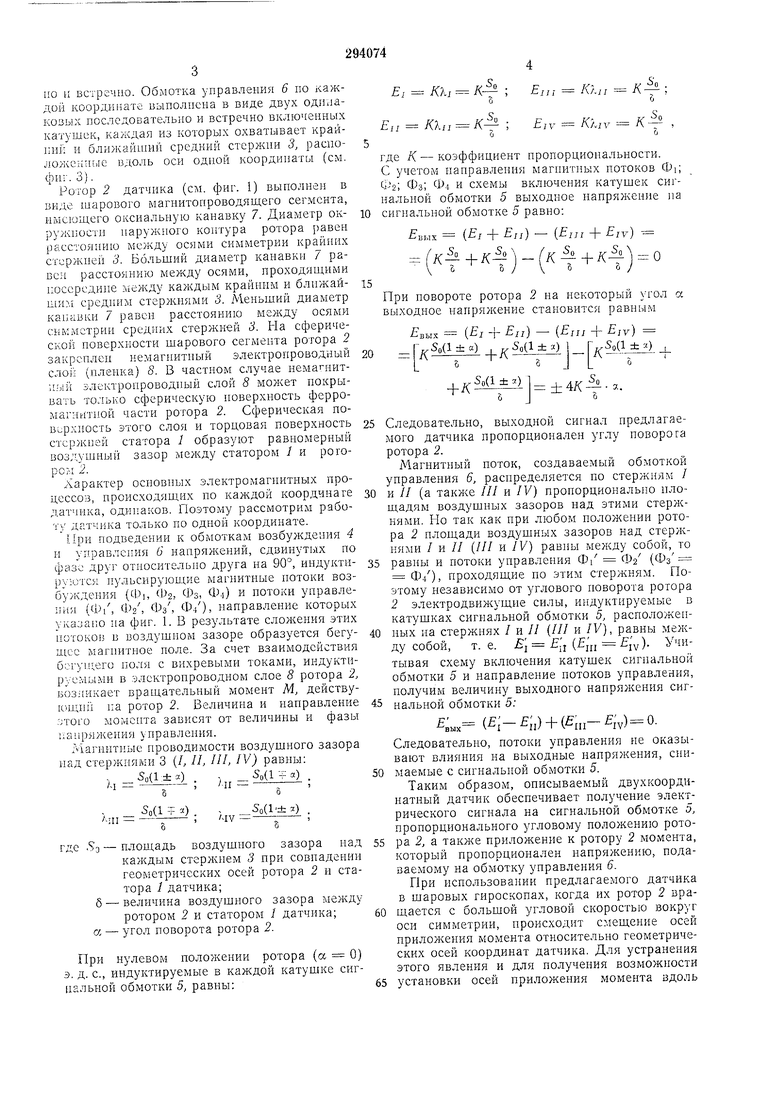
На фиг. 1 изображена принципиальная схема магнитопровода предлагаемого двухкоординатного датчика; на фиг. 2 - схема сигнальной обмотки по каждой координате; на фиг. 3 - схема обмотки управления но каждой координате; на фиг. 4 - схема обмотки управления ио одной координате для датчика с вращающимся ротором.
Описываемый двухкоординатный датчик состоит из восьмистержневого магнитопровода
статора / с размещенными на нем обмоткалш и ротора 2, не имеющего обмоток (см. фиг. 1). Магнитопровод статора / выполнен в виде диска (или кольца), на торцовой поверхности которого расположено восемь стержней 3, ио четыре стержня в плоскости каждой координаты. Четыре средние стержня 3 охватываются обмоткой возбуждения 4. Сигнальная обмотка 5 по каждой координате выполнена в виде четырех одинаковых катушек с равным числом
витков (см. фиг. 2). Каждые две катущки этой обмотки 5, располол енные на крайнем и блил айщем среднем стержне, соединены собой носледовательно и встречно. Пары катушек, раснололчснные вдоль оси координаты,
но и встречно. Обмотка управления 6 по каждой координате вынолнена в виде двух одпиакозых носледователыю и встречно включенных катушек, каждая из которых охватывает крайпик и ближайн1ин средний стержни 3, расиоложетияе вдоль оси одной координаты (см. фиг. 3).
Ротор 2 датчика (см. фиг. 1) вынолнен в виде шарового магнитонроводящего сегмента, имеющего оксиальную канавку 7. Диаметр окружпостн наружного контура ротора равен расстоянию между осями симметрии крайних стержней 3. Больший диаметр канавки 7 равен расстоянию между осями, проходящими посередине между каждым крайним и ближайшии средним стержнями 3. Меньщий диаметр канавки 7 равен расстоянию между осями симметрии средних стержней 3. На сферической поверхности шарового сегмента ротора 2 закреплен немагнитный электропроводный ело;; (пленка) 8. В частном случае немагнитн.ый электропроводный слой 8 может покрывать только сферическую поверхность ферромагнитной части ротора 2. Сферическая поверхность этого слоя и торцовая поверхность стержней статора 1 образуют равномерный воздупшый зазор между статором / и рогором 2.
Характер основных электромагнитных продессоз, происходящих по каждой коордчнаге датчика, одинаков. Поэтому рассмотрим работу датчика только по одной координате.
iIpH подведении к обмоткам возбуждения 4 и управления 6 напряжений, сдвинутых но фазе друг относительно друга на 90°, индуктиру;отся пульсируюодие магнитные потоки возбуждения (Ф, (Da, Фз, Ф-О и потоки унравле;.ия (Ф/, Фг, Фз, ), направление которых указано на фиг. 1. В результате сложения этих истоков в воздушном зазоре образуется бегущее магпитное ноле. За счет взаимодействия бегун,еги поля с вихревыми токами, индуктируемыми в электропроводном слое 8 ротора 2, Боз; икает вращательный момент М, действукпдин па ротор 2. Величина и направление ггого MOiviCHTa завнеят от величины и фазы панряжения управлепия.
Магнитные нроводимости воздушного зазора нахТ, стержнями 3 (/, //, ///, /V) равны;
) 5о(1±сс) . 5о(1 т а) .
- . -и - ,
5о(1 Т с) .
S,(l.±,) .
Д1у ,
.S3 - площадь воздушного зазора над каждым стержнем 3 при совпадении геометрических осей ротора 2 и статора 1 датчика; б - величина воздушного зазора между
ротором 2 и статором / датчика; а - угол новорота ротора 2.
So
с к-г/ 0
КК; К
cjji А/.// А- : о
So
En ККп К ; E,v -- К ,
где К - коэффициент пропорциональности. С учетом нанравлепия магпитпых потоков Ф Ф2; Фз; Ф- и схемы включения катушек сигнальной обмотки 5 выходное напряжение на
сигнальной обмотке 5 равно:
вых (/ + Ей) - (Ещ + /у) -
(к (к +
VSЪ J Ъ5 у
При повороте ротора 2 на некоторый угол а выходное напряжение становится равным
Свых (Ej -f- л) - (Ещ -j- EIV)
Sf,{l±a) . 5о(1±:.)
I (l ± )
- A
+ /(§((
У-.
uв
Следовательно, выходной сигнал предлагаемого датчика пропорционален углу поворота ротора 2.
Магнитный поток, создаваемый обмоткой управления 6, распределяется по стержням /
и // (а также /// и IV) пропорционально площадям воздушных зазоров над этими стержнями. Но так как при любом положении ротора 2 площади воздушных зазоров над стержнями I и II (III и /У) равны между собой, то
равны и потоки управления Ф/ Фз (Фз Ф./), проходящие по этим стержням. Поэтому независимо от углового поворота ротора 2 электродвижущие силы, индуктируемые в катушках сигнальной обмотки 5, расположенпых па стержнях / и // (/// и IV), равны между собой, т. е. i il (fjii )- тывая схему включения катушек сигнальной обмотки 5 и направление потоков управления, получим величину выходного напряжения сигнальной обмотки 5:
. () + () 0Следовательно, потоки управления не оказывают влияния на выходные напряжения, снимаемые с сигнальной обмотки 5.
Таким образом, описываемый двухкоординатный датчик обеспечивает получение электрического сигнала на сигнальной обмотке 5, пропорционального угловому положению ротора 2, а также приложение к ротору 2 момента, который пропорционален напряжению, подаваемому на обмотку управления 6.
При использовании предлагаемого датчика в шаровых гироскопах, когда их ротор 2 вращается с большой угловой скоростью вокруг оси симметрии, происходит смещение осей приложения момента относительно геометрических осей координат датчика. Для устранения этого явления и для получения возможности
произвольно заданных осей обмотка управления 6 описываемого датчика по каждой координате дополняется двумя катушками. В этом случае обмотка управления 6 каждой координаты датчика выполняется в виде двух одинаковых катушек, расположенных в плоскости одиой координаты, и двух одинаковых катушек, расположенных в плоскости другой координаты. Каждая из этих катушек охватывает один крайний и ближайший средний стержни 3, а между собой эти катушки соединены последовательно (см. фиг. 4). Вторая координата имеет аналогичное выполнение обмотки управления 6.
При подключении обмотки возбуждения 4 и обмотки управления 6 одной из координат, выполненных в виде четырех катушек, к источнику питания Б воздушном зазоре создаются два бегуших магнитных поля. Направление движения одного из них совпадает с геометрической осью координаты датчика, на которой расположена одна пара катушек управления 6 Wi-Wi (с осью X), а направление движения другого поля совпадает с геометрической осью другой координаты датчика, на которой расположена другая пара катушек управления 6 W2-Wz (с осью У), в результате взаимодействия каждого из бегуш,их полей с полем, создаваемым вихревыми токами, которые индуктируются в поверхностном слое 8 ротора 2 (см. фиг. 1), создаются моменты М и М. Последние стремятся повернуть ротор в направлении каждой составляюш;ей бегушего поля. Сложение этих моментов приводит к воздействию на ротор 2 суммарного момента /Mv , повернутого относительно координатных осей X и У на некоторый угол ф. В связи с тем, что по всем четырем катушкам обмотки управления 6 каждой координаты протекает один и тот же ток /упр, величины моментов MX и Mj, будут пропорциональны числам витков Wi и W2, так как
My /С-Фупру -OB-siml),
Мх К-Фуиу -Фв-БШг),
где/С - коэффициент пропорциональности;
Фупр.. - магнитный поток, создаупр у ваемый катушками управления 6 одной координаты, расположенными соответственно по осям У и X; Фв - магнитный поток обмотки
возбуждения 4;
ф; ij)i - фазовый сдвиг между потоками Фв и Фупру ,
-
- . W
упру 5
9
Но так как
/V
ij)i const; 1)) const и const, то
Следовательно, изменение отношения числа витков W и У72 приводит к изменению соотношений моментов Мд; и My, что вызывает поворот вектора момента Mv .
На фиг. 4 изображены некоторые ноложения вектора суммарного момента ЛЬ.; Mv. ; уИ;:,, при изменении величины момента, действующего но оси У - Му, , М.у, Муг- Из Л4OS имеем
,Щ:/СоWz
ф arc tg - arc tg - . Al It/i
или при Al /(2
i №2 Ф arc tg --.
то ту5Wi
Таким образом, при последовательном подсоединении к обмотке управления 6 каладой координаты предлагаемого датчика двух последовательно включенных катушек, расположенных по оси другой координаты, можно повернуть оси приложения момента на любой угол, равный отношению числа витков в обмотке управления и в последовательно подсоединенных к ней катушках. В частном случае отношение витков может быть выбрано таким, чтобы с учетом скорости врашения ротора оси приложения момента к ротору совпали с геометрическими осями координат датчика, которые являются осями датчика угла.
0
Предмет изобретения
1.Двухкоординатный датчик, содержаш;ий восьмистержневой магнитопровод статора с
5 расположенными на нем обмоткой возбуждения и сигнальной обмоткой и ротор, выполненный в виде шарового сегмента, отличаю1цийся тем, что, с целью одновременного получения на выходе сигнала, пропорционального углу
0 поворота ротора и приложения к ротору момента, пропорционального величине и фазе напряжения управления, в нем на магнитопроводе статора по салсдой координате размеш,ена обмотка управления, выполненная в виде
5 двух включенных последовательно и встречно катушек, каждая из которых охватывает крайний и ближайший средний стержни магнитопровода, а ротор, диаметр основания которого равен расстоянию мелчду осями симметрии
0 противолежащих крайних стержней, имеет оксиальную канавку, внешний диаметр которой равен расстоянию между серединами промежутков крайних и средних стержней, а внутренний диаметр - расстоянию между серединами средних стержней, при этом на сферической поверхности этого сегмента закреплен немагнитный электропроводящий слой.
2.Устройство ио п. 1, отличающееся тем, что, с целью исключения смеп1ения осей приложения момента при врап1,ающемся роторе, последовательно с обмоткой управления каждой координаты датчика включены две одинаковые последовательно соединеи Пз1е обмотки, расположенные в плоскости другой координаPua.Z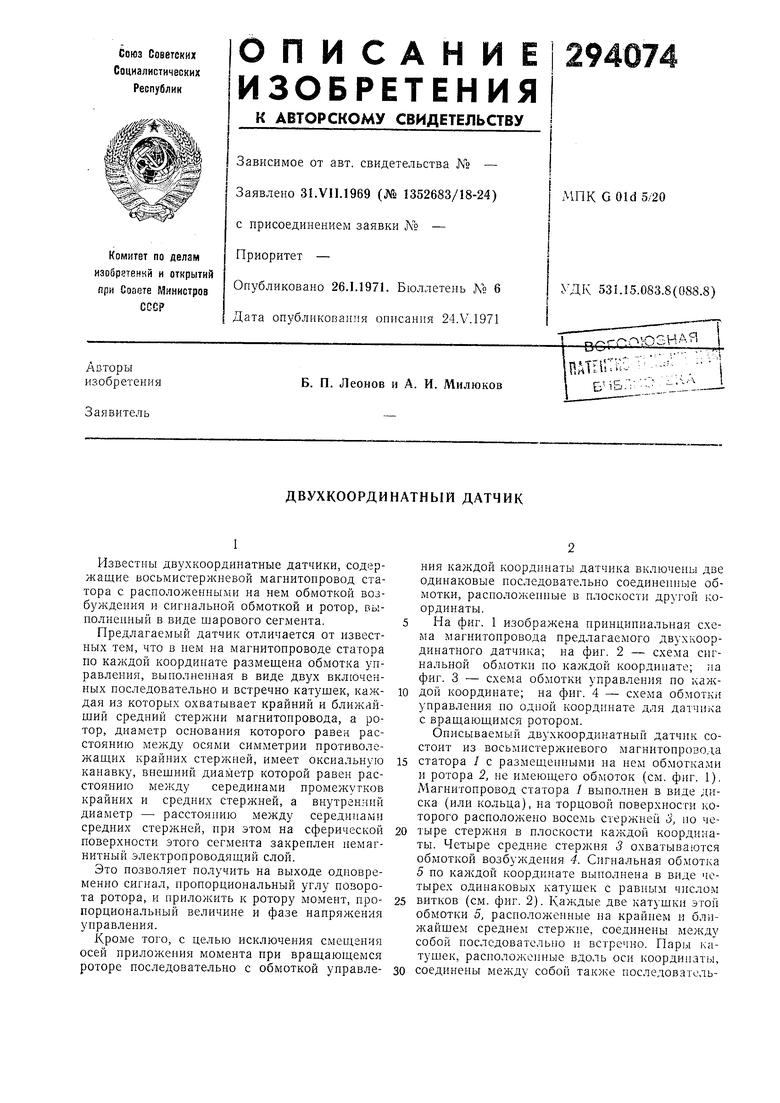
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА | 1971 |
|
SU309242A1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА | 1998 |
|
RU2154257C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Двухкоординатный датчик угла | 1979 |
|
SU838317A1 |
| Шестикоординатный датчик нагрузки | 1982 |
|
SU1016713A1 |
| Двухкоординатный индуктивный датчик угла поворота | 1990 |
|
SU1805284A1 |
| Двухкоординатный датчик угла | 1985 |
|
SU1262274A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |