Изобретение относится к судовым средствам магнитной защиты подводного или надводного объекта, в частности к автоматическим регуляторам магнитного поля объекта.
Известны автоматические регуляторы магнитного поля объекта, которые, при измерении напряженности его магнитного поля в местах расположения датчиков, установленных на корпусе, с учетом сигналов о широте и долготе местонахождения объекта, а также сигналов о его угловых координатах и о величине токов в секциях его размагничивающих обмоток, управляют заданным параметром магнитного поля объекта, например величиной его магнитного момента с помощью источников тока в этих секциях.
Примером таких регуляторов служат регуляторы: «Кадмий-Р», КДС и другие.
Автоматический регулятор магнитного поля объекта (патент №2416547 от 20.04.11 г.) взят в качестве прототипа и включает блоки:
- приема сигналов от навигационного комплекса и от датчиков магнитного поля объекта и формирования алгоритма управления системой автоматического управления магнитным полем объекта, который принимает сигналы о токах в секциях размагничивающих обмоток (РУ);
- управления электромагнитными компенсаторами магнитного поля объекта;
- распределения сигналов управления эффективностью компенсаторов.
Регулятор обеспечивает управление магнитным полем объекта. По заданному алгоритму функционирования регулятором реализуется управление магнитным полем объекта по косвенному измерению с использованием сигналов от датчиков напряженности магнитного поля объекта, установленных на корпусе, с учетом сигналов о широте и долготе местонахождения объекта и угловых координатах, полученных от навигационного комплекса, а также сигналов о токах электромагнитных компенсаторов магнитного поля объекта.
В процессе плавания объекта при воздействии различных факторов изменяются его магнитные характеристики. При этом параметры регулятора, установленные при его настройке на магнитном стенде, могут не обеспечивать требуемого уровня магнитной защиты объекта.
Существенным недостатком такой аппаратуры управления магнитным полем объекта является отсутствие возможности оценки его магнитного состояния в процессе плавания.
Учитывая то, что объем информации, поступающей в регулятор в виде сигналов о токах в курсовых шпангоутных, курсовых батоксовых, индуктивной горизонтальной, постоянной шпангоутной, постоянной батоксовой и постоянной горизонтальной обмоток, а также от магнитометрических датчиков, установленных на корпусе объекта, при обработке ее по разработанному алгоритму достаточен для оценки его магнитного состояния, возможно исключить указанный недостаток и обеспечить сигнализацию при снижении уровня магнитной защиты объекта.
Алгоритм оценки (контроля) магнитного состояния объекта в процессе плавания и сигнализация о нарушении требуемого уровня его магнитной защиты включает две операции:
1) реализуется контроль магнитного состояния объекта по величине составляющих его дипольного магнитного момента (ДММ) 

где 


2) определяется модуль 

Величины j-ых составляющих ДММ Mjрез. объекта определяются как алгебраические суммы погрешностей компенсации j-ых составляющих ДММ индуктивного Mij и остаточного Mpj магнитного поля (МП) объекта дипольными магнитными моментами, создаваемыми соответствующими обмотками размагничивающего устройства, с помощью следующих соотношений
Mх рез.=(Mix-MКШ)+(Mpx-MПШ)
My рез.=(Miy-MКБ)+(Mpy-MПБ)
Mz рез.=(Miz-MИГ)+(Mpz-MПГ),
где: Mix, Miy, Miz - продольная, поперечная и вертикальная составляющие индуктивного ДММ МП объекта;
Mpx, Mpy, Mpz - составляющие ДММ, создаваемые курсовой шпангоутной, курсовой батоксовой и индуктивной горизонтальной обмотками;
Мрх, Мру, Мр2 - продольная, поперечная и вертикальная составляющие ДММ остаточного МП объекта;
МПШ, МПБ, МПГ - создаваемые постоянной шпангоутной, постоянной батоксовой и постоянной горизонтальной обмотками.
Текущие значения указанных составляющих ДММ в процессе плавания объекта могут быть определены, если воспользоваться возможностями, заложенными в регуляторе магнитного поля.
Регулятор предназначен для автоматического управления размагничивающим устройством объекта и позволяет:
- по данным с навигационного комплекса информации о параметрах движения объекта: углах курса, крена, дифферента, а также широте и долготе местоположения формировать сигналы Uix, Uiy и Uiz, пропорциональные продольной 


- по данным измерений размещенными на объекте магнитометрическими датчиками комплекса формировать сигналы Upx, Upy и Upz, пропорциональные продольной Мpx, поперечной Mpy и вертикальной Mpz составляющим ДММ остаточного магнитного поля объекта.
При дополнении регулятора возможностью измерения сигналов, действующих на датчики, может быть выполнена расчетная оценка величин составляющих ДММ объекта и ДММ, создаваемых обмотками РУ. В этом случае:
- составляющие ДММ Mix, Miy, Мiz рассчитывают с помощью соотношений
Мi(x,y,z)=ki(x,y,z)Bl (x,y,z)=кi(x,y,z)Ui(x,y,z),
где: ki(x,y,z), кi(x,y,z) - постоянные коэффициенты, рассчитываемые по результатам измерения составляющих индукции МП объекта на стенде размагничивания.
Составляющие ДММ Мрх, Мру, Mpz рассчитывают с помощью соотношений
Мp(x,y,z)=kp(x,y,z)Bl (x,y,z)=кp(x,y,z)Up(x,y,z),
где: kp(x,y,z), кp(x,y,z) - постоянные коэффициенты, рассчитываемые по результатам измерения составляющих индукции МП объекта на стенде размагничивания;
- составляющие ДММ МКШ, МКБ, МИГ, МПШ, МПБ, МПГ рассчитывают с помощью следующих соотношений
МКШ=кКШIКШ
МКБ=кКБIКБ
МИГ=кИГIИГ
МПШ=кПШIПШ
МПБ=кПБIПБ
МПГ=кПГIПГ,
где: кКШ, кКБ, кИГ, кПШ, кПБ, кПГ - постоянные коэффициенты, рассчитываемые по результатам регулировки обмоток РУ на стенде размагничивания;
IКШ, IКБ, IИГ, IПШ, IПБ, IПГ - токи в курсовой шпангоутной, курсовой батоксовой, индуктивной горизонтальной, постоянной шпангоутной, постоянной батоксовой и постоянной горизонтальной обмотках.
С учетом этого, выражения для расчета составляющих ДММ М, Мх рез., Мy рез., Мz рез. имеют вид:
Mx рез.=(кixUix-кКШIКШ)+(кpxUpx-кПШIПШ)
My рез.=(кiyUiy-кКБIКБ)+(кpyUpy-кПБIПБ)
Mz рез.=(кizUiz-кИГIИГ)+(кpzUpz-кИГIИГ),
Данные значения составляющих ДММ Мрез.(x,y,z) объекта позволяют определить модуль ДММ 
Задачей предлагаемого изобретения является обеспечение возможности оценки магнитного состояния объекта и сигнализации о нарушении требуемого уровня его магнитной защиты в процессе плавания объекта с существующим регулятором его магнитного поля.
Для этого в автоматический регулятор магнитного поля подводного или надводного объекта включены блок контроля магнитного состояния объекта и блок сигнализации о превышении требуемых значений регулируемых параметров, причем вход блока контроля магнитного состояния объекта соединен с выходом блока формирования алгоритма управления, а выход соединен с входом блока сигнализации о снижении уровня магнитной защиты объекта.
Сущность изобретения поясняется блок-схемой автоматического регулятора магнитного поля подводного или надводного объекта (см. чертеж).
В процессе плавания объекта работа автоматического регулятора его магнитного поля осуществляется следующим образом.
В блок приема входных сигналов (БПр) 1 поступают сигналы от датчиков магнитного поля объекта (Доб), установленных на его корпусе, от его навигационного комплекса (Нк) и о токах электромагнитных компенсаторов.
В соответствии с требуемым алгоритмом функционирования, реализуемым в блоке формирования алгоритма управления (БФАУ) 2, этот блок по заданной программе вырабатывает управляющие сигналы, которые через блок распределения (БР) 3 поступают на входы блоков управления электромагнитными компенсаторами (БУ) 4.
Величины входных управляющих сигналов, поступающих в каждый из этих блоков, автоматически корректируются блоком распределения в соответствии с сигналами из блока формирования алгоритма управления, с учетом магнитного состояния объекта, которое соответствует сигналам, поступающим от датчиков, установленных на его корпусе, с учетом сигналов о токах каждого из электромагнитных компенсаторов (ЭК) 5 (управляемых источников тока, питающих секции размагничивающих обмоток).
Блок управления электромагнитными компенсаторами, воздействуя на электромагнитные компенсаторы, устанавливает необходимое компенсирующее электромагнитное поле объекта.
Сигналы, поступающие из блока формирования алгоритма управления в блок контроля его магнитного состояния (БК) 6, позволяют в соответствии с заданной программой произвести расчет параметров, характеризующих уровень магнитной защиты объекта. При снижении этого уровня ниже установленной нормы сигналы из блока контроля поступают в блок сигнализации (БС) 7, который извещает об этом оператора.
Включение блока контроля магнитного состояния объекта и блока сигнализации о превышении требуемых значений регулируемых параметров в автоматический регулятор магнитного поля подводного или надводного объекта позволяет в процессе плавания оценивать его магнитное состояние и сигнализировать о нарушении требуемого уровня его магнитной защиты.
Предлагаемое изобретение позволит существенно улучшить магнитную защиту подводного или надводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор магнитного поля подводного или надводного объекта | 2017 |
|
RU2658241C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО ОБЪЕКТА ПРИ НАЛАДКЕ ЕГО СИСТЕМЫ ЭЛЕКТРОМАГНИТНОЙ КОМПЕНСАЦИИ | 2011 |
|
RU2489727C2 |
| РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ НАДВОДНОГО (ПОДВОДНОГО) ОБЪЕКТА | 2011 |
|
RU2477494C2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| МАНЕВРЕННЫЙ СТЕНД ДЛЯ ИЗМЕРЕНИЯ И НАСТРОЙКИ МАГНИТНОГО ПОЛЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО ОБЪЕКТА | 2013 |
|
RU2551412C1 |
| СПОСОБ НАСТРОЙКИ МАГНИТОМЕТРИЧЕСКОГО МНОГОДАТЧИКОВОГО РЕГУЛЯТОРА ТОКОВ В ОБМОТКАХ РАЗМАГНИЧИВАЮЩЕГО УСТРОЙСТВА СУДНА С ФЕРРОМАГНИТНЫМ КОРПУСОМ | 2009 |
|
RU2412857C1 |
| Способ автоматического размагничивания кораблей | 2021 |
|
RU2771186C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| СПОСОБ РАЗМАГНИЧИВАНИЯ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2095277C1 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
Изобретение относится к судовым средствам магнитной защиты подводного или надводного объекта, в частности к автоматическим регуляторам его магнитного поля. Автоматический регулятор магнитного поля подводного или надводного объекта включает блок приема сигналов от датчиков его магнитного поля, от навигационного комплекса и сигналов о токах компенсаторов магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта и блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта. В него введен блок контроля магнитного состояния объекта, соединенный с выходом блока формирования алгоритма управления, и блок сигнализации о превышении предельных значений параметров его магнитной защиты, соединенный с выходом блока контроля магнитного состояния объекта. В результате обеспечивается возможность оценивать магнитное состояние объекта в процессе плавания и сигнализировать о снижении требуемого уровня его магнитной защиты. 1 ил.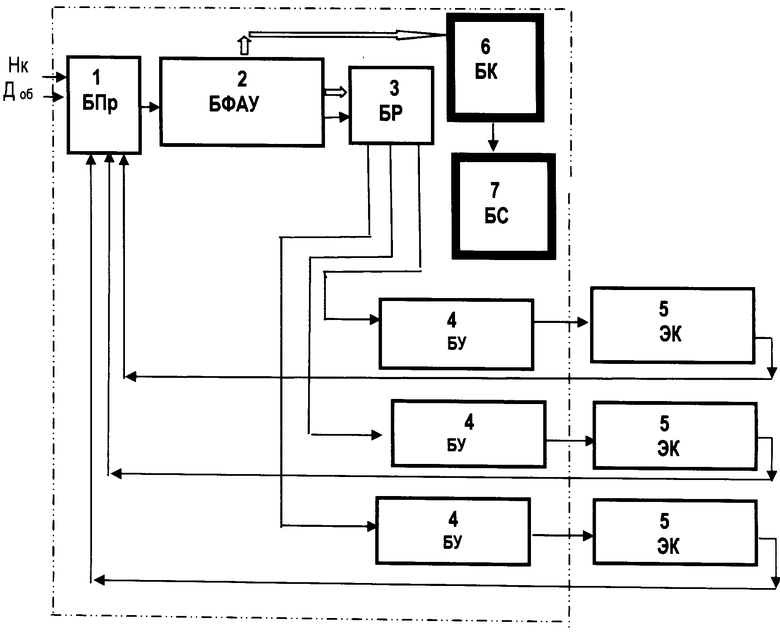
Автоматический регулятор магнитного поля подводного или надводного объекта, включающий блок приема сигналов от датчиков его магнитного поля, от навигационного комплекса и сигналов о токах компенсаторов магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта и блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта, отличающийся тем, что в него введен блок контроля магнитного состояния объекта, соединенный с выходом блока формирования алгоритма управления, и блок сигнализации о превышении предельных значений параметров его магнитной защиты, соединенный с выходом блока контроля магнитного состояния объекта.
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ТОКАМИ В ОБМОТКАХ РАЗМАГНИЧИВАЮЩЕГО УСТРОЙСТВА СУДНА С ФЕРРОМАГНИТНЫМ КОРПУСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415050C2 |
| RU 95115466 A, 20.08.1997 | |||
| JP 2011199144 A, 06.10.2011 | |||
| US 5463523 A, 31.10.1995 | |||

