Изобретение относится к области измерительной техники и предназначено для измерения кажущегося ускорения летательных аппаратов (ЛА), вызванного действием на его центр масс всех сил. кроме гравитационных, он может также найти широкое применение при решении различных навигационных задач.
Цепь изобретения - повышение чувствительности и упрощение юстировки.
Ожидаемый положительный эффект от реализации предлагаемого решения заключается в повышении чувствительности и упрощении юстировки.
Примеры конкретного выполнения.
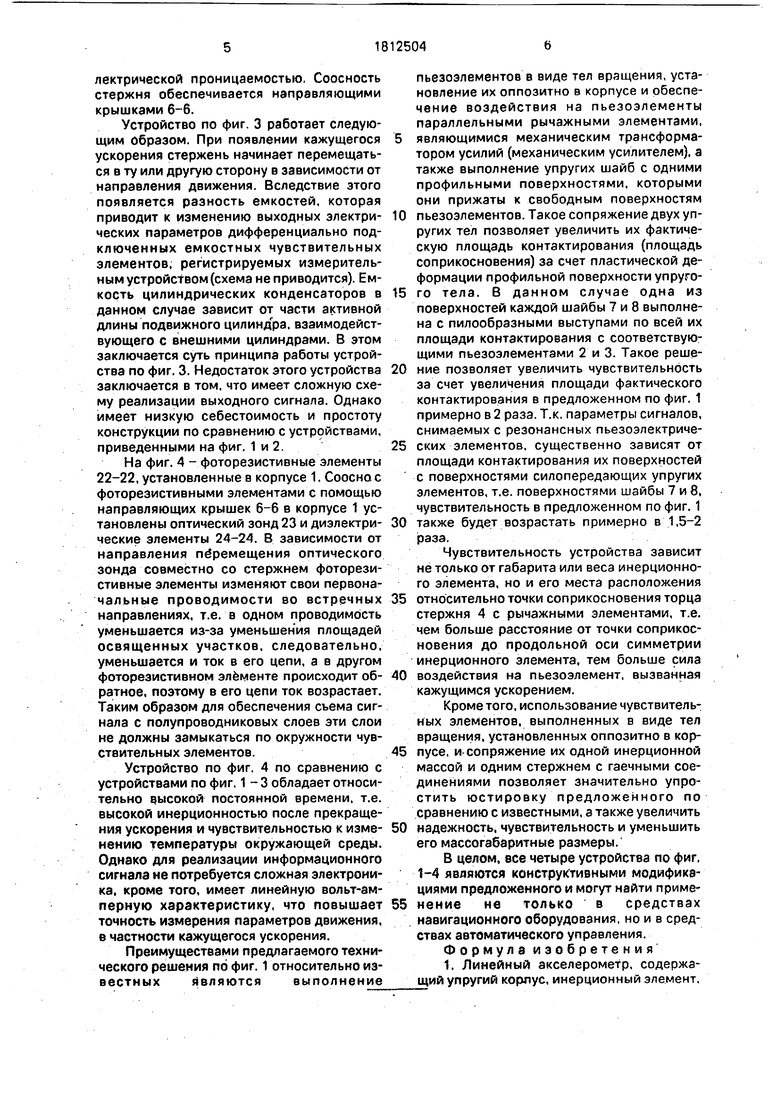
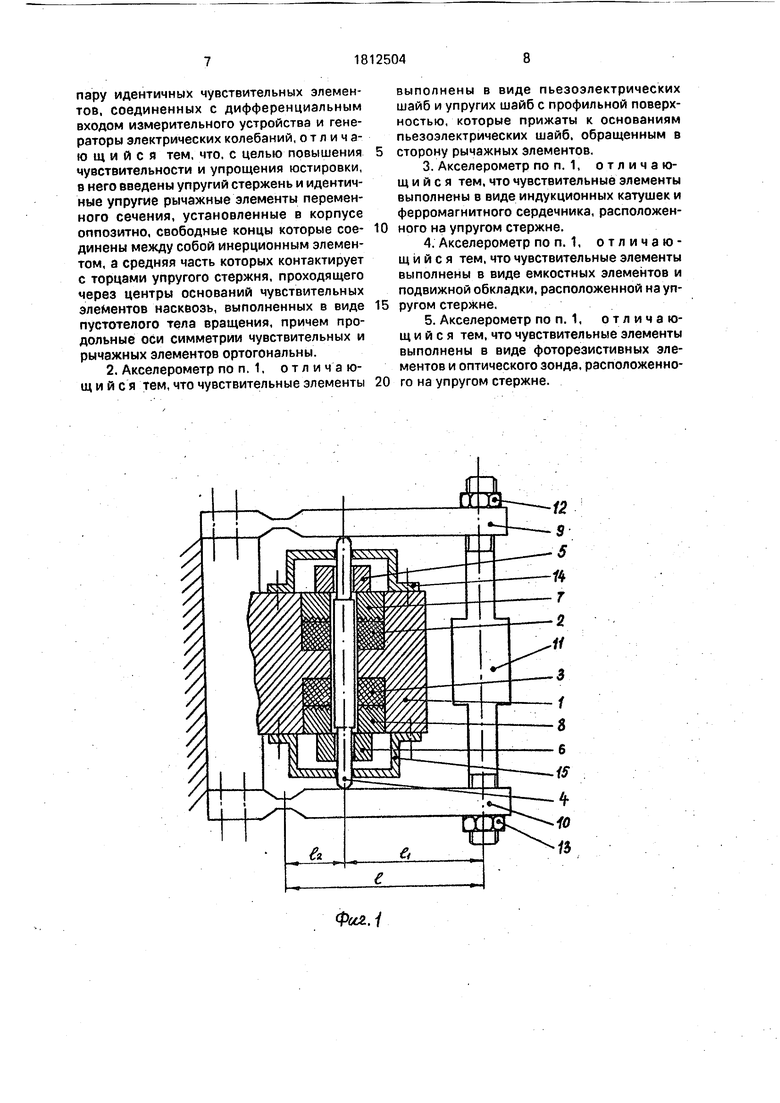
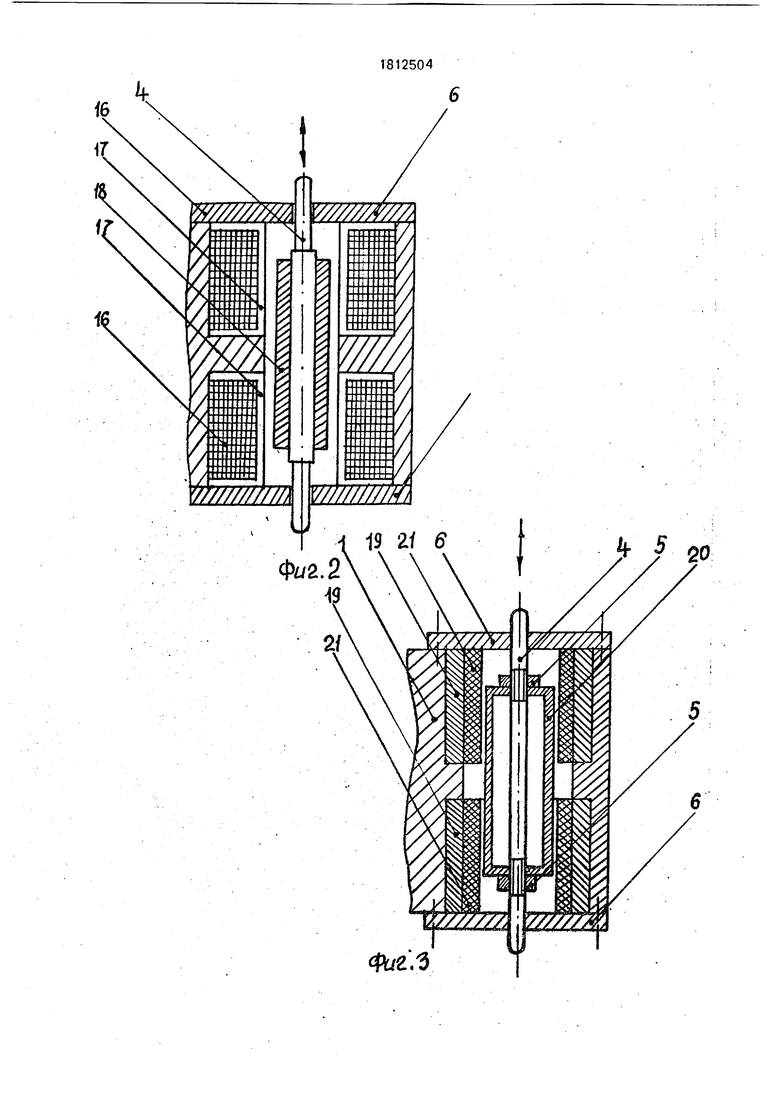
На фиг. 1 показаны конструктивные элементы линейного акселерометра; на фиг. 2 - часть конструктивных элементов линейного акселерометра с индукционными чувствительными элементами, другая часть конструктивных элементов и их взаимосвязь аналогична соответствующим конструктивным элементам устройства по фиг. 1; на фиг. 3 - то же, что и на фиг. 2, но с емкостными чувствительными элементами; на фиг. 4 - то же. что и на фиг. 2. но с фоторезистивными чувствительными элементами.
Линейный акселерометр по фиг. 1 содержит упругий корпус 1 Т-образной формы. В средней части корпуса 1 оппозитно установлены пьезоэлектрические шайбы 2 и 3. К отдаленным друг от друга основаниям этих шайб при помощи стержня 2 и гаек 5, 6 предварительно прижаты силопередающие упругие шайбы 7 и 8 с профильными основаниями. С выступающими торцами стержнч 4
00
го ел
о
приведены в механический контакт упругие рычажные элементы 9 и 10, выполненные с переменным по длине сечением. Рычажные элементы 9 и 10 одними концами симметрично закреплены на плечах Т-образного корпуса, а другими концами сопряжены между собой инерционным элементом 11, выполненным с переменным сечением. Инерционный элемент сопряжен с рычажными элементами при помощи гаек 12 и 13. Соосно со стержнем 4 в средней части корпуса 1 установлены направляющие втулки 14 и 15.
Устройство по фиг. 1 работает следующим образом.
При подаче напряжения питания резонансной частоты от генераторов автоколебанийк соответствующим пьезоэлектрическим шайбам оно вызывает в них механические колебания, амплитуда и частота которых зависит от геометрических размеров пьезоэлектрических шайб и их материала, а также от амплитуды напряжения питания и прикладываемого к ним давления.
При наличии кажущегося линейного ускорения, воздействующего вдоль продольных осей пьезоэлектрических элементов, один из рычажных элементов начинает прижиматься к соответствующим торцам упругого стержня, тем самым предварительное прижимное усилие на соответствующем пьезоэлектрическом элементе начинает возрастать, вследствие чего его резонансная частота увеличивается, а в другом пьезоэлектрическом элементе (т.к. рычажные элементы свободными концами жестко сопряжены между собой через один инерционный элемент и установлены в корпусе оппозитно) происходит обратное, т.е. его частота уменьшается. Разность частот, снимаемых с пьезоэлектрических шайб, будет пропорциональна кажущемуся ускорению.
Если предположить, что расстояние от продольной оси симметрии инерционного элемента до точки соприкосновения стержня с рычажными элементами (до продольной оси стержня) равно И; расстояние от продольной оси стержня до середины наименьшего сечения рычажных элементов равно h, а расстояние между серединой наименьшего сечения рычажных элементов до продольной оси инерционного элемента равно I, то сила воздействия, вызванная ускорением, на пьезоэлектрических элементах будет определяться формулой
1-/ - 2 С И р |/ с
F т (--f- ) Fy - Fy - К Fy,
где Fy - сила инерции, вызванная кажущимся ускорением элемента
F |mnxl , где т - масса инерционного элемента.
5Следовательно, согласно F KFy, сила воздействия на чувствительные элементы увеличится в К раз (где К 1, так как И fc, что является преимуществом предложенного относительно прототипа.
0 На фиг. 2 индукционные катушки, состоящие из обмоток 16-16 и магнитопроводов 17-17 установлены оппозитно и неподвижно в корпусе 1 линейного акселерометра. Соосно с индукционными катушками уста5 новлен ферромагнитный сердечник 18, который сопряжен с упругим стержнем 4, выполненный из немагнитного материала, соосность стержня обеспечивается крышками 6-6.
0 Устройство по фиг. 2 работает следующим образом. При появлении кажущегося ускорения упругий стержень и совместно с ним ферромагнитный сердечник начинает линейно перемещаться в ту или иную сторо5 ну в зависимости от направления переменного движения, в результате чего на дифференциально подключенном выходе (схема не приводится)устройства появляется разность сигналов в аналоговом виде.
0 Это объясняется тем, что комплексные сопротивления индукционных катушек в зависимости от направления перемещения сердечника изменяются в противоположном направлении, т.е. одно уменьшается, а
5 другое увеличивается.
Устройство по фиг. 2 по сравнению с устройством по фиг. 1 имеет худшие массо- габаритные и энергетические характеристики. Однако превосходит его по простоте
0 обработки и реализации выходного сигнала. На фиг. 3 показана часть конструктивных элементов линейного акселерометра с емкостными чувствительными элементами. Другая часть конструктивных элементов и
5 их взаимосвязь аналогичны соответствующим конструктивным элементам и их взаимосвязи устройства по фиг. 1.
Устройство, показанное на фиг. 3, содержит упругий корпус 1, оппозитно уста0 новленные в корпусе внешние цилиндры 19-19, выполняющие функцию внешнего электрода емкостных элементов, соосно с внешними электродами емкостных элементов размещен внутренний цилиндр (внут5 ренний электрод емкостного элемента) 20, который при помощи гаек 5-5 закреплен на упругом стержне 4. Между внешними цилиндрами и внутренним подвижным цилиндром размещены цилиндры 21-21, |полненные из материала с высокой диэлектрической проницаемостью. Соосность стержня обеспечивается направляющими крышками 6-6.
Устройство по фиг. 3 работает следующим образом. При появлении кажущегося ускорения стержень начинает перемещаться в ту или другую сторону в зависимости от направления движения. Вследствие этого появляется разность емкостей, которая приводит к изменению выходных электрических параметров дифференциально подключенных емкостных чувствительных элементов, регистрируемых измерительным устройством (схема не приводится). Емкость цилиндрических конденсаторов в данном случае зависит от части активной длины подвижного цилиндра, взаимодействующего с внешними цилиндрами. В этом заключается суть принципа работы устройства по фиг. 3. Недостаток этого устройства заключается в том, что имеет сложную схему реализации выходного сигнала. Однако имеет низкую себестоимость и простоту конструкции по сравнению с устройствами, приведенными на фиг. 1 и 2.
На фиг. 4 - фоторезистивные элементы 22-22, установленные в корпусе 1. Сооснос фоторезистивными элементами с помощью направляющих крышек 6-6 в корпусе 1 установлены оптический зонд 23 и диэлектрические элементы 24-24. В зависимости от направления перемещения оптического зонда совместно со стержнем фоторезистивные элементы изменяют свои первона- чальные проводимости во встречных направлениях, т.е. в одном проводимость уменьшается из-за уменьшения площадей освященных участков, следовательно, уменьшается и ток в его цепи, а в другом фоторезистивном элементе происходит обратное, поэтому в его цепи ток возрастает. Таким образом для обеспечения съема сигнала с полупроводниковых слоев эти слои не должны замыкаться по окружности чувствительных элементов.
Устройство по фиг. 4 по сравнению с устройствами по фиг. 1-3 обладает относительно высокой постоянной времени, т.е. высокой инерционностью после прекращения ускорения и чувствительностью к изменению температуры окружающей среды. Однако для реализации информационного сигнала не потребуется сложная электроника, кроме того, имеет линейную вольт-амперную характеристику, что повышает точность измерения параметров движения, в частности кажущегося ускорения.
Преимуществами предлагаемого технического решения по фиг. 1 относительно из- вестных являются выполнение
пьезоэлементов в виде тел вращения, установление их оппозитно в корпусе и обеспечение воздействия на пьезоэлементы параллельными рычажными элементами, 5 являющимися механическим трансформатором усилий (механическим усилителем), а также выполнение упругих шайб с одними профильными поверхностями, которыми они прижаты к свободным поверхностям
0 пьезоэлементов. Такое сопряжение двух упругих тел позволяет увеличить их фактическую площадь контактирования (площадь соприкосновения) за счет пластической деформации профильной поверхности упруго5 го тела. В данном случае одна из поверхностей каждой шайбы 7 и 8 выполнена с пилообразными выступами по всей их площади контактирования с соответствующими пьезоэлементами 2 и 3. Такое реше0 ние позволяет увеличить чувствительность за счет увеличения площади фактического контактирования в предложенном по фиг. 1 примерно в 2 раза. Т.к. параметры сигналов, снимаемых с резонансных пьезоэлектриче5 ских элементов, существенно зависят от площади контактирования их поверхностей с поверхностями силопередающих упругих элементов, т.е. поверхностями шайбы 7 и 8, чувствительность в предложенном по фиг. 1
0 также будет возрастать примерно в 1,5-2 раза.
Чувствительность устройства зависит не только от габарита или веса инерционного элемента, но и его места расположения
5 относительно точки соприкосновения торца стержня 4 с рычажными элементами, т.е. чем больше расстояние от точки соприкосновения до продольной оси симметрии инерционного элемента, тем больше сила
0 воздействия на пьезоэлемент, вызванная кажущимся ускорением.
Кроме того, использование чувствительных элементов, выполненных в виде тел вращения, установленных оппозитно в кор5 пусе, и-сопряжение их одной инерционной массой и одним стержнем с гаечными соединениями позволяет значительно упростить юстировку предложенного по сравнению с известными, а также увеличить
0 надежность, чувствительность и уменьшить его массогабаритные размеры.
В целом, все четыре устройства по фиг. 1-4 являются конструктивными модификациями предложенного и могут найти приме5 нение не только в средствах навигационного оборудования, но и в средствах автоматического управления. Формула изобретени я 1, Линейный акселерометр, содержащий упругий корпус, инерционный элемент,
пару идентичных чувствительных элементов, соединенных с дифференциальным входом измерительного устройства и генераторы электрических колебаний, отличающийся тем, что, с целью повышения чувствительности и упрощения юстировки, в него введены упругий стержень и идентичные упругие рычажные элементы переменного сечения, установленные в корпусе оппозитно, свободные концы которые сое- динены между собой инерционным элементом, а средняя часть которых контактирует с торцами упругого стержня, проходящего через центры оснований чувствительных элементов насквозь, выполненных в виде пустотелого тела вращения, причем продольные оси симметрии чувствительных и рычажных элементов ортогональны.
2. Акселерометр по п. 1, отличающийся тем, что чувствительные элементы
выполнены в виде пьезоэлектрических шайб и упругих шайб с профильной поверхностью, которые прижаты к основаниям пьезоэлектрических шайб, обращенным в сторону рычажных элементов.
3. Акселерометр по п. 1, отличающийся тем, что чувствительные элементы выполнены в виде индукционных катушек и ферромагнитного сердечника, расположенного на упругом стержне.
4. Акселерометр по п. 1, отличающийся тем, что чувствительные элементы выполнены в виде емкостных элементов и подвижной обкладки, расположенной на упругом стержне.
5. Акселерометр поп.1, отличающийся тем, что чувствительные элементы выполнены в виде фоторезистивных элементов и оптического зонда, расположенного на упругом стержне.

| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный акселерометр | 1990 |
|
SU1781614A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2106642C1 |
| Способ реализации и устройство чувствительного элемента для контроля параметров движения в составе многоуровневого многокристального модуля | 2019 |
|
RU2702401C1 |
| Пьезоэлектрический акселерометр | 2016 |
|
RU2627571C1 |
| Пьезоэлектрический акселерометр | 1980 |
|
SU918857A1 |
| УДАРОПРОЧНЫЙ МАЛОГАБАРИТНЫЙ ВЫСОКОЧУВСТВИТЕЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2615600C1 |
| Акселерометр, работающий на деформации сдвига в пьезоэлементе, и способ его изготовления | 2023 |
|
RU2814852C1 |
| Пьезоэлектрический преобразователь ускорения | 1990 |
|
SU1809392A1 |
| Пьезоэлектрический акселерометр | 1980 |
|
SU1015310A1 |
| АКСЕЛЕРОМЕТР | 2009 |
|
RU2421736C1 |
Использование: в измерительной технике. Сущность изобретения: линейный акселерометр содержит упругий корпус, в средней части которого установлены чувствительные элементы, выполненные в виде пустотелого тела вращения. Через центры оснований чувствительных элементов насквозь проходит упругий стержень, который торцами контактирует со средней частью упругих рычажных элементов переменного сечения, установленных в корпусе оппозит- но. Свободные концы упругих рычажных элементов соединены между собой инерционным элементом. Продольные оси симметрии чувствительных рычажных элементов ортогональны. Чувствительные элементы соединены с дифференциальным входом измерительного устройства. В акселерометр также входят генераторы электрических колебаний. Чувствительные элементы выполняются либо в виде пьезоэлектрических шайб и упругих шайб с профильной поверхностью, либо в виде индукционных катушек и ферромагнитного сердечника, либо в виде емкостных элементов и подвижной обкладки, либо в виде фоторезистивных элементов и оптического зонда. 4 з.п. ф-лы, 4 ил.
Фаг. f
фгёЛ
| Устройство для измерения механических величин | 1983 |
|
SU1198394A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Каргу Л.И | |||
| Измерительные устройства летательных аппаратов | |||
| М.: Машиностроение, 1988 | |||
| с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
