Изобретение относится к области измерительной техники и может быть использовано при измерении параметров прямых и рассеянных сигналов.
Цель изобретения - расширение области применения за счет прогнозирования момента времени перехода сигнала через нуль.
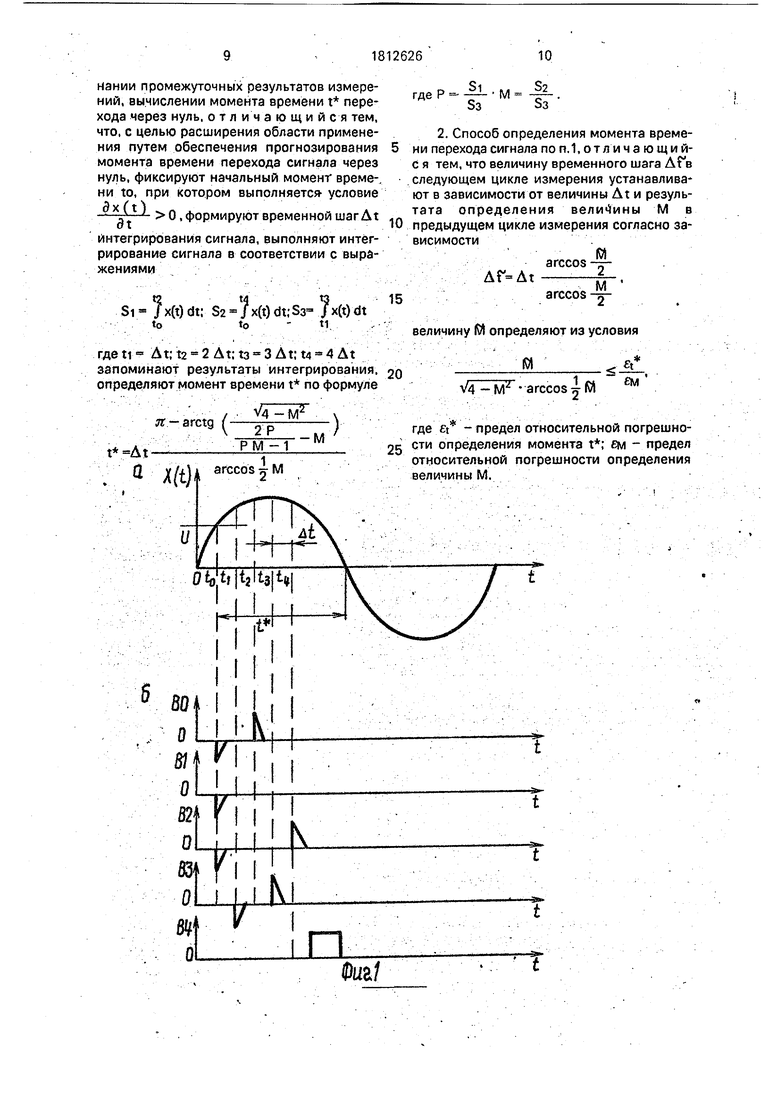
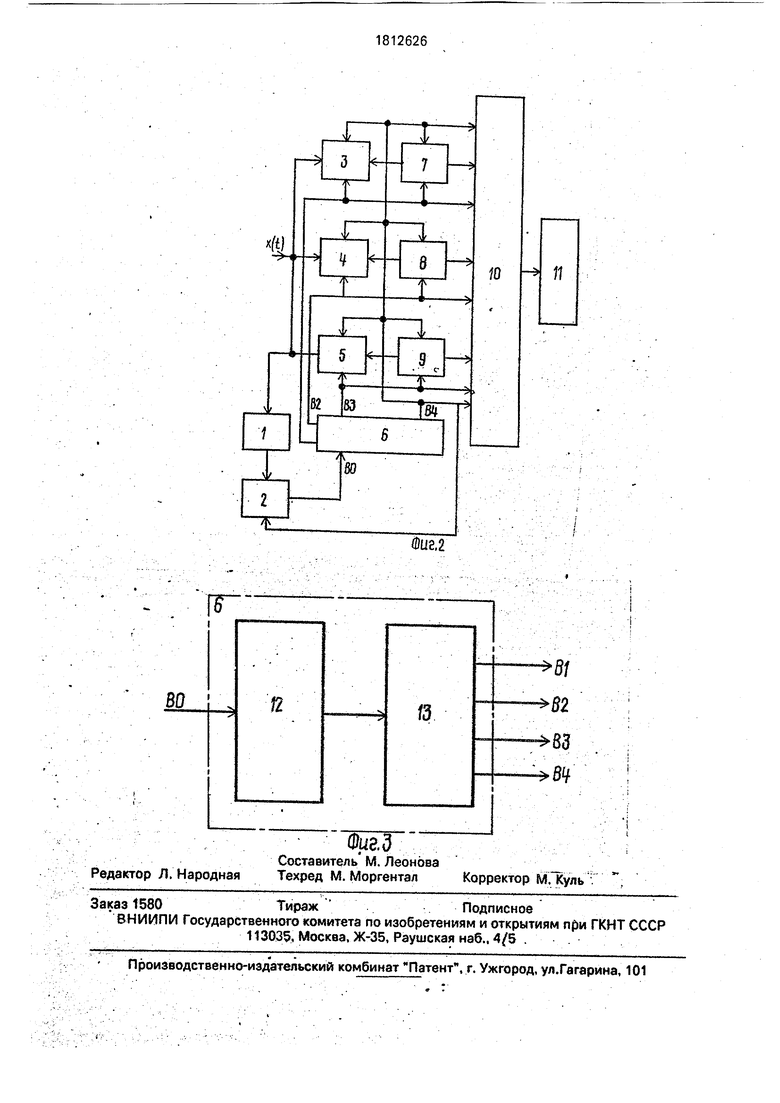
На фиг. 1 приведена временная диаграмма, поясняющая сущность предложенного способа; на фиг. 2 показана структурная схема устройства, реализующего способ; на фиг. 3 - схема блока управления.
Способ заключается в следующем.
Фиксируют начальный момент времени Ь 0, при котором сигнал x(t) Asin{F + o t) достигает заданного порогового уровня V, если этому моменту предшествовало выполнение условия x(t)| V. Формируют временной шаг A t интегрирования сигнала, причем величину At устанавливают в зависимости от верхнего значения частоты fe сигнала по формуле At 0,1,/fe.
00
N3 О Ю О
Выполняют интегрирование сигнала в соответствии с выражениями
Si Jx(t)dt; S2 jx(t)dt;
toto
S3 /x(t)dt(1)
ч
где ti At; t2 2 At; 13 3 At; t4 4 At Явный вид выражений (1) имеет вид
Si Jx(t) dt - ---- sin (F+Др) sin Ap. (1)
. I
to
A
л - f
S2 /xjt) dt - sin (F+2A0 sin 2Ap
t0 ;
yt-i
sln(F+2A$sin A (3)
где A - амплитуда сигнала, f - частота сигнала, F - начальная фаза сигнала, отвечающая моменту времени to (см. фиг, 1), kip- приращение фазы, сигнала, отвечающей временному шагу At интегрирования.
Запоминают результаты интегрирования Si; 82; 83. Определяют момент времени t перехода сигнала через нуль по формуле косвенного измерения
п - arctg
- 4 - М2
2Р
Дт-
РМ -1
-М
arccos -у М
rAeP |L;M |L/На этом определение момента времени t в первом цикле измерений завершается, Измерение в последующих циклах выполняется аналогично. Перед началом очередного цикла измерений осуществляют сброс все полученных ранее значений результатов Si; 82; 83 интегрирования сигнала x(t). При необходимости осуществлять коррекцию величины шага At интегрирования по результатам предыдущих измерений.
Таким образом, предложенный способ позволяет определять момент времени t до того, как событие перехода сигнала через нуль произошло, т.е. позволяет прогнозировать момент времени перехода сигнала через нуль.
Устройство, реализующее способ, содержит пороговое устройство 1, таймер 2,
а в
(1)
At
(1)
(2)
(3)
сигаюip-ей
ваениуле
(4)
ени тся, оледросьтаx(t). рекпо
идентичные по структуре и составу первый, второй и третий интеграторы 3, 4 и 5 соответственно, блок управления б, идентичные по структуре и составу аналоговые запоми5 нающие устройства 7,8 и 9 соответственно, решающее устройство 10, устройство инди- каций 11.
Вход порогового устройства 1 и входы интеграторов 3, 4 и 5 соединены со входом
10 устройства, выходы последних соединены с входами запоминающих устройств 7, 8 и 9 соответственно, выходы которых соедине- .ны с информационными входами решающего устройства 10, выход которого соединен
15 с входом устройства индикации 11, синхронизирующий выход порогового устройства 1 соединен с управляющим входом таймера 2, выход таймера 2 соединен с управляющим входом блока управления б, первый выход
20 .блока 6 соединен с управляющими входами блоков 4 и 8, третий выход блока § соединен с управляющими входами блоков 5 и 9, причем первый, второй и третий выходы блока 6 соединены с соответствующими упраёля25 ющими входами блока 10, четвертый выход блока 6 соединен с входами Пуск и Сброс блока 10, входами Сброс интеграторов 3, 4, 5 и запоминающих устройств 7, 8, 9 и входом Сброс таймера 2. 30 Блок управления б содержит счетчик
. импульсов 12 и формирователь импульсов 13, вход счетчика 12 соединен с управляющим входом блока 6, выход счетчика 12 соединен с входом формирователя импульсов
35 13, выходы которого служат выходами блока 6. -.;. „ ... -. . ;:-.;-.-. ..-. . . .
Решающее устройство содержит АЦП,
регистры памяти и центральный блок.
Устройство работает следующим обра40 зом.
На вход устройства поступает сигнал x(t) с круговой частотой со:
5
5
x(t) Asin(F + wt)
где А - амплитуда сигнала, F - начальная фаза, отвечающая моменту времени j0 (см. фиг. 1). Когда сигнал достигает порогового уровня V и при выполнении условий
дх-( t}
--д- . О , когда знак производной сигнала x(t) больше нуля, блок 1 вырабатывает импульс, поступающий на вход таймера 2, который запускается в момент времени (см. фиг. 1). Одновременно блок б вырабатывает первый сигнал разрешения, который поступает на управляющие входы интеграторов 3 и 4. Блоки 3 и 4 начинают интегрировать входной сигнал согласно операциям (1), (2).
Таймер 2 формирует тактовые импульсы, следующие через интервал г. Блок 6 содержит счетчик импульсов 12, который формирует отсчет времени tt; I 1,4 следующие через интервалы Att; 1 1,4. При этом At k r, где k- коэффициент задаваемый при настройке счетчика. Настройка счетчика выполняется с учетом верхнего значения частоты fB сигнала. Величину fB определяют по априорным данным или по результатам из- мерений в предыдущем цикле.
В одном цикле измерений счетчик формирует четыре временных интервала At, равные по длительности. Значение At заносят в соответствующий регистр памяти бло- ка 10.
По истечении первого временного интервала At с начала измерений блок б формирует второй сигнал разрешения, который поступает на управляющий вход интеграто- ра 5. Последний начинает интегрировать входной сигнал согласно операции (3).
В момент времени t2 2 At блок 6 формирует сигнал запрета, который поступает на соответствующий управляющий вход блока 3. Блок 3 прекращает интегрирование входного сигнала. Одновременно по сигн алу блока 6 блок 7 запоминает результат интегрирования Si.
8.момент времени ts 3 At блок 6 фор- мирует сигнал запрета, который поступает на соответствующий управляющий вход блока 5.
Блок 5 прекращает интегрирование входного сигнала. Одновременно по сигна- лу блока б блок 9 запоминает результат интегрирования 8з.
В момент времени t4 4 At блок 6 формирует сигнал запрета, который поступает на соответствующий управляющий вход блока 4, блок 4 прекращает интегрирование сигнала. Одновременно по сигналу блока 6 блок 8 запоминает результат интегрирования $2| ,
По сигналу Пуск блока 6 решающее устройство 10 считывает из регистра памяти значение. At и результаты интегрирования Si: 82; Ssc выходов блоков 7,8,9 соответственно, преобразует последние в цифровую форму и вычисляет момент времени t пере- хода сигнала через нуль по формуле (4). Пуск блока 10 осуществляется передним фронтом импульса на выходе В4 блока 6. Значение г отображается на экране устройства 11. На этом цикл измерений завершается. . Блок 6 формирует сигнал Сброс, под действием которого в блоках 3, 4, 5 и 7, 8, 9 осуществляется сброс значений Si; S2; Ss одновременно очищаются регистры блока
10. После этого устройство готово к выполнению очередного цикла измерений. Сброс осуществляется задним фронтом импульса на выходе В 4 блока 6. Запись значения At в соответствующий регистр памяти блока 10 может выполняться автоматически, для чего используют соответствующую связь между блоками 6 и 10 (на фиг..2 не показана).
Все узлы и блоки устройства выполнены на основе типовых агрегатированных средств измерительной и вычислительной техники. Блоки 3, 4, 5„ и 7, 8, 9 являются аналоговыми, блок 10 - цифровым и содержит в своем составе АЦП. Управляющий блок 6 выполняет элементарные логические функции и собран из соответствующие микросхем..
П р и м е р 1 реализации способа.
В метеонавигацирнной доплеровской РЛС формируется сигнал, моменты времени его перехода через нуль подлежат измерению. По предварительным данным верхнее значение частоты сигнала не превышает 2 кГц. Исходя из этого настраивают счетчик на формирование шага интегрирования At с. Выбирают пороговый уровень V 3 В, исходя из возможных значений амплитуды сигнала, и соответствующим образом настраивают блок 1.
Определение момента времени t осуществляется следующим образом. Блок 1 вырабатывает импульс, поступающий на вход блока 6. Последний запускает таймер 2 в момент времени t0. Этому моменту времени отвечает фаза сигнала F, Одновременно блок 6 вырабатывает первый сигнал разрешения, блоки 3 и 4 начинают интегрирование сигнала x(t).
Через интервал времени At с блока 6 формирует второй сигнал разрешения, блок 5 начинает интегрирование сигнала x(t). По сигналам блока б в момент времени t2 с блок 3 прекращает интегрирование. Результат интегрирования Si 8,55-10 5 В с запоминается в блоке 7. В момент времени ts 1,510 с блок 9 запоминает результат интегрирования Sa 1,16 10 4 В с. В момент IA 210 с блок 8 запоминает результат интегрирования S2 2,21 104 В с. По сигналу блока 6 решающее устройство 10 считывает все результаты интегрирования, преобразует их в цифровую форму и вычисляет момент времени по формуле (4): t - 5.,93 - 1.145 10 3 с. При этом:
§L S3
1,984; РIL
S3
0,769;
(Y4-fvF
2p
PM-1
-M
) 0,26 рад.;
arccos TJ- M 0,126 рад.
Для определенности укажем параметры сигнала x(t), измеренные прецизионными средствами:
. А - 11,4 В; Т - 1 /f - 2,. с; F - 0,26 рад. -. -; /.; : ;; ; - ;- : Таким образом, измерение завершает- , ся в момент времени t4 с, а момент времени t перехода через нуль наступит через t 1,145 Ю с. Следовательно, способ обеспечивает возможность прогнозирования наступления момента времени t.
Пример 2 реализации способа.
Верхнее значенье частоты сигнала рав- но fa-800 Гц, пороговый уровень равен V 5 В. Устанавливают шаг интегрирования, равный Д t 1, с, для .чего соответствующим образом настраивают счётчик. . В процессе измерений блоки 7, 8, 9 запомнили следующие результаты интегрирования, полученные на выходах блоков 3,4, 5 -. : -
Si 4,335-103 В.с; $2 - 2.725-103 В.с
8з 1,369-10 3 В.с. :
По сигналу блока б решающее устройство 10 считывают эти значения, преобразует их в цифровую форму и вычисляет момент времени t.перехода сигнала через нуль по формуле (4):.. -
,25-10419,716 2,464МО 3 с.
Результаты промежуточных вычислений равны
М
qq. S3 У
1
РSi
S3
arceos ,1 рад
arctg {
V4 - М2
2Р
-М
) 1,17 рад.;
. РМ.-1 Для определенности укажем параметры
сигнала x(t). Измеренные прецизионными 50 средствами: А 5,6 В; f 127,4 Гц; Т
7,85 10 3с;
Таким образом, измерение завершается в момент времени t4 с, а .момент 55 времени t перехода через нуль наступит через г 2,464-10 с. Следовательно, способ обеспечивает прогнозирование момента времени.
Пример 3 реализации способа. Исходя из верхнего значения частоты сигнала счетчик настроен на формирование шага интегрирования At . Пороговый уровень установлен равным V 1,45 В. В процессе измерений блоки 7, 8, 9 запомнили следующие результаты интегрирования, полученные на выходах блоков 3,
4 5:« л St «-2,42-10 5 В с S2 -0,585 10 4B C
Ss -- 2,955
По сигналу блока 6 решающее устройство 10 считывает эти значения, преобразует их в цифровую форму и вычисляет момент времени по Формуле (4):
t -по -3В-3, при этом: М 1,993; Р 0,818
Следовательно, интегрированию подвергался отрицательный прлупёриод сигнала). ,: . /// :: .... ; .; ..
Для определенности укажем параметры
сигналах)Измерение прецизионными средствами:
А 5,7 В; f 12,73 кГц; Т - 7, с
. Благодаря этому
Измерение завершается в момент времени ц с, а момент времени t перехода через нуль наступит через t 3,6-10 с. Следовательно; способ обеспечивает прогнозирование момента времени t.
Таким образом, предложенный способ обеспечивает прогнозирование момента времени перехода сигнала через нуль. Это расширяет область применения способа.
Другим преимуществом предложенного технического решения является высокая точность измерений. Это достигается за счет того, что в формуле (4) используется отношение результатов интегрирования Si
S3
исключается мультипликативная погрешность измерений. Аддитивная погрешность измерений существенно уменьшается благодаря операциям интегрирования сигнала. Еще одно преимущество предложенного способа состоит в его быстродействии (момент t определяется до наступления события перехода сигнала через нуль). . Предложенный способ характеризуется простотой практической реализации. Формула изобретения 1. Способ определения момента времени перехода сигнала через нуль, основанный на фиксации начального момента времени to, при котором-сигнал x(t) достигает заданного порогового уровня V, запоми, S2 сигналам-
5з

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения частоты переменного напряжения и устройство для его осуществления | 1991 |
|
SU1780036A1 |
| Способ измерения амплитудного значения переменного напряжения | 1990 |
|
SU1742737A1 |
| Способ определения сдвига фаз двух гармонических сигналов | 1990 |
|
SU1831686A3 |
| Способ измерения амплитудного значения и периода переменного напряжения | 1990 |
|
SU1780028A1 |
| Способ измерения экстремумов электрического сигнала | 1990 |
|
SU1788475A1 |
| Способ определения момента времени перехода сигнала через нуль | 1990 |
|
SU1734200A1 |
| Устройство для измерения сопротивления сварочного контура | 1983 |
|
SU1211010A1 |
| Устройство для полиномиальной оценки сигнала в условиях помех | 1990 |
|
SU1762313A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| Способ измерения времени установления выходного сигнала цифроаналоговых преобразователей и устройство для его осуществления | 1987 |
|
SU1494216A1 |
Способ определения момента времени перехода сигнала через нуль относится к области измерительной техники и может быть использован при измерении параметров прямых и рассеянных сигналов для прогнозирования момента времени перехода сигнала через нуль. В способе определения момента времени перехода сигнала через 0, формируют временной шаг At куль, основанном на фиксации начального момента времени to 0, при котором.сигнал x(t) достигает заданного порогового уровня V, запоминании промежуточных результатов измерений, вычислении момента времени t перехода через нуль по определенной формуле фиксируют начальный момент времени to, при котором выполняется условие ах (О at Интегрирования сигнала, выполняют интегрирование сигнала в соответствии с определенны ми выражениями, запоминают результаты интегрирования, определяют момент времени t no формуле, а величину А Гв следующем цикле измерения устанавливают в зависимости от величины A t и результата определения величины ffl в предыдущем цикле измерения, согласно определенной зависимости, величину М определяют по формуле. 2 ил.
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Авторское свидетельство СССР ..№ | |||
| Устройство бездребезгового ввода сигналов от контактных клавиатур | 1986 |
|
SU1330742A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
