Изобретение относится к вычислительной технике и автоматике и может быть ис- пользовано в устройствах сбора, преобразования и обработки информации систем управления и телеметрических систем, для аппроксимации и оценки параметров сигналов.
Известны способы оценки параметров сигналов X(t) в условиях помех, базирующиеся на использовании байесовской оценки при заданной функции потерь, когда считается известной апостериорная плотность вероятности оцениваемого параметра или оцениваемых параметров.
Если оцениваемые параметры независимы, а априорные плотности вероятности известны, то задача получения байесовской оценки, в принципе, разрешима, хотя найти соответствующее решение в аналитическом виде и реализовать его в виде технического устройства иногда не представляется возможным
Практически непреодолимые трудности возникают при оценке парамет ров сигналов этим способом, когда апостериорные плотности вероятности неизвестны Одним из способов преодоления таких трудностей является использование минимаксного подхо да. Однако достаточно простых методов получения минимаксных решений нет Кроме того, минимаксная оценка дает оптимальное решение только для самого наихудшего случая, определяет верхнюю границу байесовского риска и может приводить к большим потерям.
Практическую ценность методы максимального правдоподобия дтя оценки параметров сигналов снижает также сравнительно частое появление аномальных ошибок. Поэтому в условиях априорной неопределенности бывает целесообразно получать оценки по способу наименьших квадратов, в соответствии с которым функционирует устройство, выбранное в каиест- ве прототипа
При реализации метода наименьших квадратов необходимо формировать произведения вида X(t) t , где Х(т) - преобразуемый сигнал, i 1,2 Это существенно
усложняет процесс формирования оценок и
со
с
vj
,0s
hO
со со
требует значительного увеличения объема оборудования, особенно если требуется высокая или даже средняя точность реализации,
Целью изобретения является упрощение аппаратной реализации устройства.
Поставленная цель достигается введением в состав устройства распределителя импульсов, группы сумматоров со второго по m-й группы из т формирователей импульсов и группы из m ключей, что позволяет обеспечить равенство средних значений сигнала X(t) и его модели L(t) на интервалах аппроксимации, число которых (т) на единицу больше, чем степень аппроксимирующего полинома. Для этого весь интервал наблюдения сигнала Т разбивается на m интервалов длительностью At. В пределах каждого интервала iAt (i 1, 2m) обеспечивается равенство средних значений сигнала X(t) и его модели L(t) а + bt + ct2 +
at
&t
J At
jx(T))dt;
Jx(t))dt;
,at
me. С
1 (
Решение полученной системы уравнений позволяет получить оценки сигнала а, Ь, с. Так при линейной аппроксимации (т 2) эти оценки определяются соотношениями
а | (4S1-S2):
(S2-2Si);
т/г т
где Si / X(t)dt; 82 - / X(t)dt;
3)
При параболической аппроксимации (т
аЛ (9Si-4,5S2 + 5з); Ь 4 (-5Si + 4S2-S3);
с - (3Si-3S2 + S3); 2TJ,
Т/з2Т/зТ
где Si J X(t)dt; S2 Г X(t)dt; S3 Jx(t)dt
9о°
Аналогичные оценки можно получить и при другой степени аппроксимирующего полинома. При этом для формирования оценок в устройстве необходимо выполнять только операции интегрирования входного сигнала, запоминания промежуточных значений результата интегрирования и суммирования этих промежуточных значений с соответствующими весовыми коэффициентами. Операция умножения переменных
величин типа X(t) t в этом случае в устройстве отсутствует, что и позволяет существенно упростить его и уменьшить необходимый объем используемого оборудования.
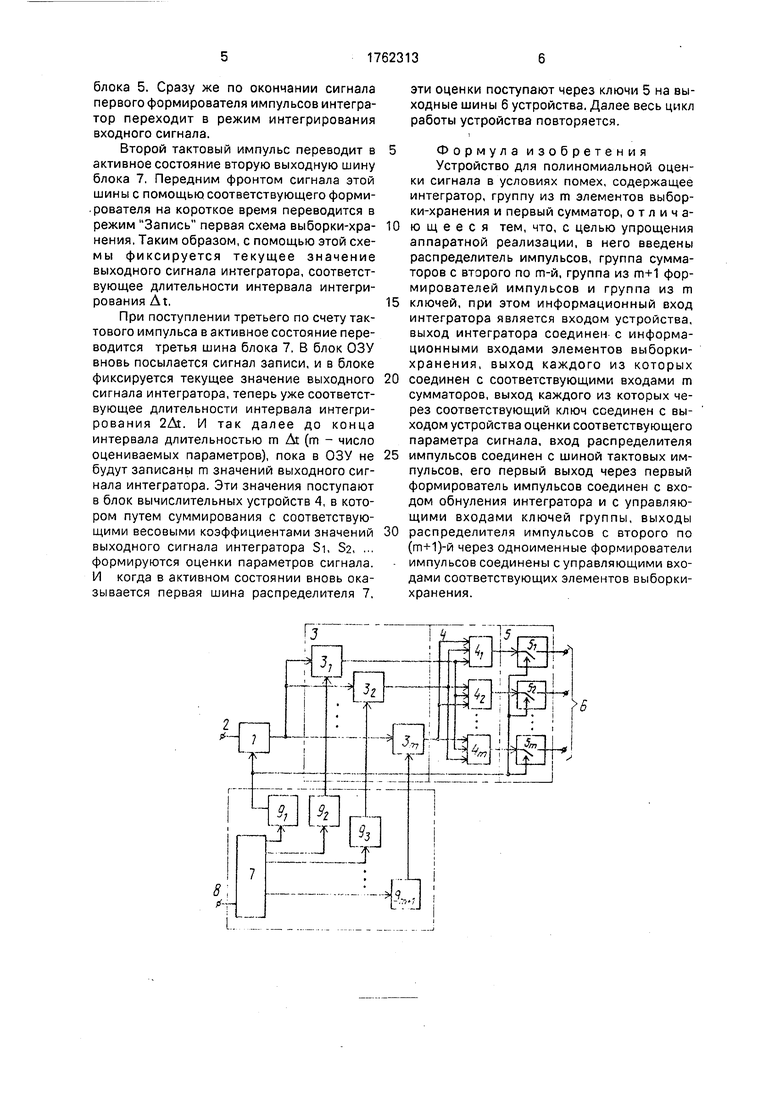
0 Устройство для полиноминальной оценки сигнала в условиях помех содержит интегратор 1 с входной шиной 2, являющейся входной шиной всего устройства, аналоговое запоминающее устройство 3, состоящее
5 из m элементов выборки-хранения, блок вычислительных устройств 4, состоящий из m сумматоров, блок ключевых устройств 5 из m ключей с выходными шинами 6, распределитель импульсов 7 с т+1 формирователя
0 импульсов 9 и с шиной 8 для подачи тактовых импульсов,
Выходные шины 6 ключей являются выходными шинами всего устройства. При этом выход интегратора 1 соединен с ин5 формационными входами элементов выборки-хранения (блока 3), выход каждого из которых соединен с соответствующими входами m сумматоров блока 4. Выход каждого из сумматоров через соответствующий ключ
0 соединен с выходной шиной устройства оценки. Вход распределителя импульсов 7 соединен с шиной тактовых импульсов 8. Его первый выход соединен через соответствующий формирователь импульсов со
5 входом обнуления интегратора и с управляющими входами ключей блока 5. Выходы распределителя импульсов со второго по (т+1)-й соединены через формирователи импульсов с управляющими входами соот0 ветствующих элементов выборки-хранения. Сигнал выходных шин блока 7 может принимать одно из двух возможных значений; уровень логического нуля (пассивное состояние выходной шины) или уровень ло5 гической единицы (активное состояние выходной шины). Причем в активном состоянии в любой момент времени может находиться только одна из выходных шин, и поступающие на вход блока 7 тактовые им0 пульсы с периодом следования At переводят поочередно выходные шины из пассивного состояния в активное.
Устройство функционирует следующим образом. Первым же тактовым импульсом,
5 поступающим на вход 8 блока 7, переводится в активное состояние первая выходная шина блока 7, По переднему фронту сигнала этой шины формирователем импульсов генерируется короткий импульс, которым обнуляется интегратор 1 и замыкаются ключи
блока 5. Сразу же по окончании сигнала первого формирователя импульсов интегратор переходит в режим интегрирования входного сигнала.
Второй тактовый импульс переводит в активное состояние вторую выходную шину блока 7, Передним фронтом сигнала этой шины с помощью, соответствующего форми- .рователя на короткое время переводится в режим Запись первая схема выборки-хранения. Таким образом, с помощью этой схемы фиксируется текущее значение выходного сигнала интегратора, соответствующее длительности интервала интегрирования At.
При поступлении третьего по счету тактового импульса в активное состояние переводится третья шина блока 7. В блок ОЗУ вновь посылается сигнал записи, и в блоке фиксируется текущее значение выходного сигнала интегратора, теперь уже соответствующее длительности интервала интегрирования 2Дг. И так далее до конца интервала длительностью m At (m - число оцениваемых параметров), пока в ОЗУ не будут записаны m значений выходного сигнала интегратора. Эти значения поступают в блок вычислительных устройств 4, в котором путем суммирования с соответствующими весовыми коэффициентами значений выходного сигнала интегратора Si, 82, ... формируются оценки параметров сигнала. И когда в активном состоянии вновь оказывается первая шина распределителя 7,
и
эти оценки поступают через ключи 5 на выходные шины 6 устройства. Далее весь цикл работы устройства повторяется.
5Ф о р м у л а и з о б р е т е н и я
Устройство для полиномиальной оценки сигнала в условиях помех, содержащее интегратор, группу из m элементов выборки-хранения и первый сумматор, о т л и ч а10 ю щ е е с я тем, что, с целью упрощения аппаратной реализации, в него введены распределитель импульсов, группа сумматоров с второго по гп-й, группа из т+1 формирователей импульсов и группа из m
15 ключей, при этом информационный вход интегратора является входом устройства, выход интегратора соединен с информационными входами элементов выборки- хранения, выход каждого из которых
20 соединен с соответствующими входами m сумматоров, выход каждого из которых через соответствующий ключ соединен с выходом устройства оценки соответствующего параметра сигнала, вход распределителя
25 импульсов соединен с шиной тактовых импульсов, его первый выход через первый формирователь импульсов соединен с входом обнуления интегратора и с управляющими входами ключей группы, выходы 30 распределителя импульсов с второго по (т+1)-й через одноименные формирователи импульсов соединены с управляющими входами соответствующих элементов выборки- хранения.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ПСЕВДОШУМОВЫХ РАДИОСИГНАЛОВ | 1990 |
|
RU2012138C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Аналого-цифровой интегратор | 1979 |
|
SU842868A1 |
| Сейсмостанция | 1987 |
|
SU1430924A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| ДВУХФАЗНЫЙ ГЕНЕРАТОР ГАРМОНИЧЕСКИХ СИГНАЛОВ | 1990 |
|
RU2033684C1 |
| Аналого-цифровой интегратор | 1979 |
|
SU849236A1 |
| Способ аналого-цифрового преобразования с весовым интегрированием и устройство для его реализации | 1981 |
|
SU953722A1 |
| Устройство для определения фазы сигналов | 1987 |
|
SU1442932A2 |
| Телеизмерительная система | 1983 |
|
SU1130894A1 |
Сущность изобретения: вычисление параметров полинома по интегральным оценкам сигнала на заданных интервалах. Устройство содержит интегратор (1), информационный вход (2), интеграторы (3), сумма торы (4), ключи (5), выходные шины (6), распределитель импульсов (7), шину (8) тактовых импульсов, формирователи импульсов (9). 2-1-3-4-5-6, 8-7-91-1; 9a-3i, 9m+1-3m, 1 ИЛ.
| Волков Е.А | |||
| Численные методы, Наука, 1987, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| Экстраполятор | 1980 |
|
SU934504A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
