Изобретение относится к ткацкому станку по меньшей мере с одной гибкой рапирой для прокладки уточной нити.
Цель изобретения - повышение надежности в работе путем снижения числа обрывов основных нитей,
На фиг.1 изображена зона зева предлагаемого ткацкого станка с приемной сторо- ны, вид в перспективе; на фиг.2 - продольный разрез направляющей для ленты гибкой рапиры и принимающей захватной головки.
На фиг.1 показаны следующие узлы: захватная головка 1, которая входит в зев со скоростью V, лента 2 гибкой рапиры, возвратно-поступательное движение которой придается вращающимся шкивом 3 с намотанной на нем лентой, бердо 4 и склиз 5 батана; направляющая б для ленты с двумя направляющими пазами 7а и 7в, в которых скользят края ленты,.
Направляющая 6 установлена с наклоном относительно горизонтали 8; при длине с разница по высоте составляет d. Отношение d:c, как показали эксперименты составляет от 0,2 до 1,6%.
Работа ткацкого станка, .
Усилия, действующие на головку, обозначены стрелками G, Н и I. Так как во входной зоне зева изменение скорости захвати является максимальным, то сила инерции I, которая, как известно пропорциональна ускорению, имеет там наибольшую величину, Вследствие расположения центра тяжести S захватной головки 1 над лентой 2, инерция i создает на гибкой ленте изгибающей момент, обуславливающий тенденцию к отрыву. Инерции t противодействуют с одной стороны вес G захватной головки 1, с другой стороны, сила Н, которая создается в ре зультате изгиба ленты 2 между выходным отверстием направляющей 6 (точка А) и задним концом захватной головки (точка В). Этот изгиб вводящей ленты 2 между точками А и В зависит от наклона, с которым установлена направляющая 6. Чем больше наклон, тем больше изгибающее усилие Н, Путем соответствующего выбора наклона направляющей б можно компенсировать инерцию за счет изгибающего усилия Н, действующего в дополнение к весу G.
В возвращенном положении захватная головка 1 находится полностью внутри направляющей б, поэтому склиз 5 батана не может располагаться выше, чем нижняя кромка выходного отверстия направляющей 6 в точке А; иначе возникает проблема Перехода захватной головки с направляющей 6 на склиз 5 батана.
На фиг.2 склиз 5 батана показан расположенным несколько ниже. Чем выше располагается склиз 5, тем больше изгиб вводящей ленты 2 между точками А и В и тем
больше изгибающее усилие Н. Чтобы получить возможно большее изгибающее усилие Н, необходимо располагать склиз 5 на той же высоте, что и нижняя кромка в точке А.
Большое усилие Н может привести к повреждению нитей основы нижней ветви зева, так как это усилие, если оно не компенсируется противодействующей инерцией, воздействует йа склиз 5 батана через ниж5 ние нити основы. Поэтому предпочтительно, если склиз .5 батана занимает не максимально возможное положение по высоте, а, как показано на фиг.2, находится несколько ниже.
0 с увеличением промежутка между точками А и В изгибающее усилие Н становится меньше. Поэтому перемещением выходного отверстия направляющей 6 можно влиять на изгибающее усилие Н и, таким образом, до5 биться соответствия с инерцией.
При замене артикула ткани, если необходимо меняют число оборотов станка, а захватные головки заменяют другими. В этом случае также нужно привести в соот0 ветствии наклон направляющих б, их расстояния от батана и высоту склиза батана. Предпочтительно, если конструкция ткацкого станка предусмотравает возможность регулирования наклона направляющих 6,
5 расстояния между направляющей и батаном и/или высоты склиза батана. Форм улаизобретения 1. Бесчелночный ткацкий станок, содержащий по меньшей мере одну ленточную
0 гибкую рапиру, имеющую возможность скольжения по склизу батана и несущую закрепленную на ней захватную головку, Центр тяжести которой расположен над лентой гибкой рапиры, отличающийся
5 тем, что, с целью повышения надежности в работе путем снижения числа обрывов основных нитей, лента гибкой рапиры перед зевом расположена и направлена в зев наклонно в сторону склиза батана.
0 2. Станок по п.1, о т л и ч а ю щ и и с я тем, что, имеется шкив для гибкой рапиры, а между шкивом и зевом установлена направляющая для ленты гибкой рапиры, при этом направляющая расположена под углом
5 к горизонтали,
3. Станок по пп.1 и 2, отличающий- с я тем, что склиз батана расположен по меньшей мере на один миллиметр ниже нижней кромки отверстия для ленты гибкой рапиры в направляющей.
4. Станок по пп.1 и 2, от л и ч а ю щ и й- с я тем, что склиз батана расположен по меньшей мере на одном уровне с нижней кромкой отверстия для ленты гибкой рапиры в направляющей.
5. Станок по пп.1 и 2, отличающий- с я тем, что склиз батана имеет возможность регулировки по высоте.
6. Станок по пп.2 и 5. отличающий- с я тем, что направляющая установлена с
0
возможностью регулировки ее углового положения и расстояния до склиза батана.
7. Станок по пп.1-б, отличающий- с я тем, что станок имеет две гибкие рапиры с приёмной и подающей головками, при этом каждая рапира имеет направляющую, причем направляющие имеют различный наклон.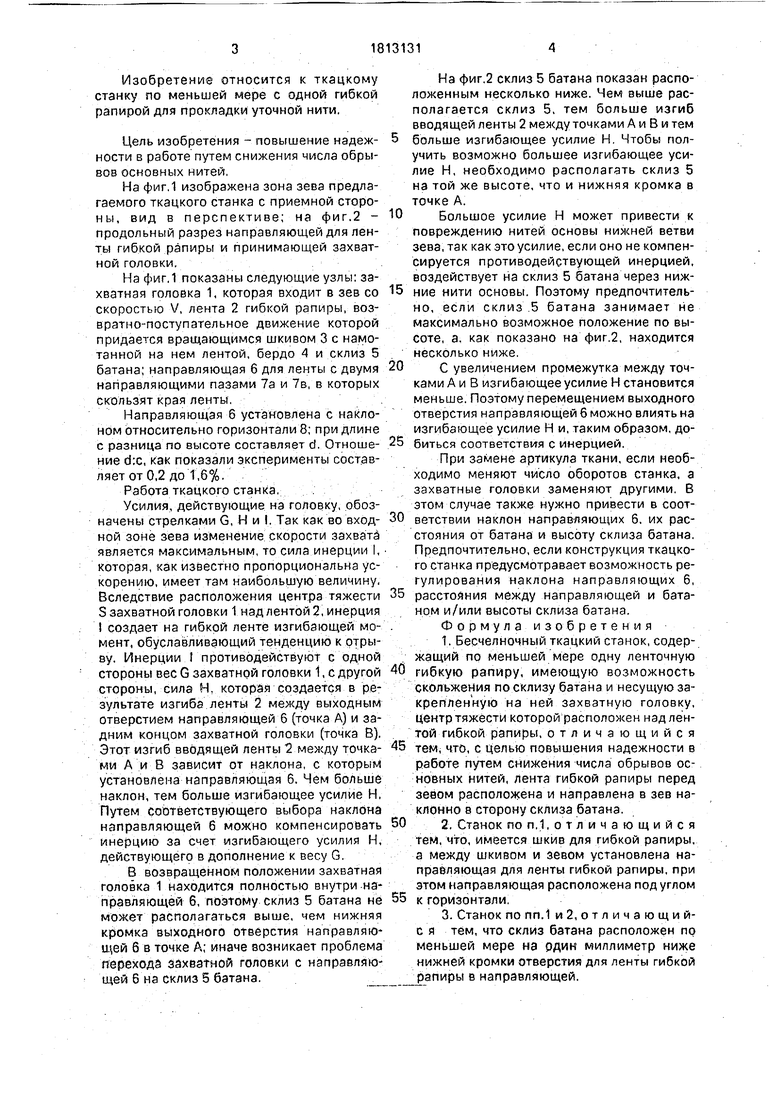
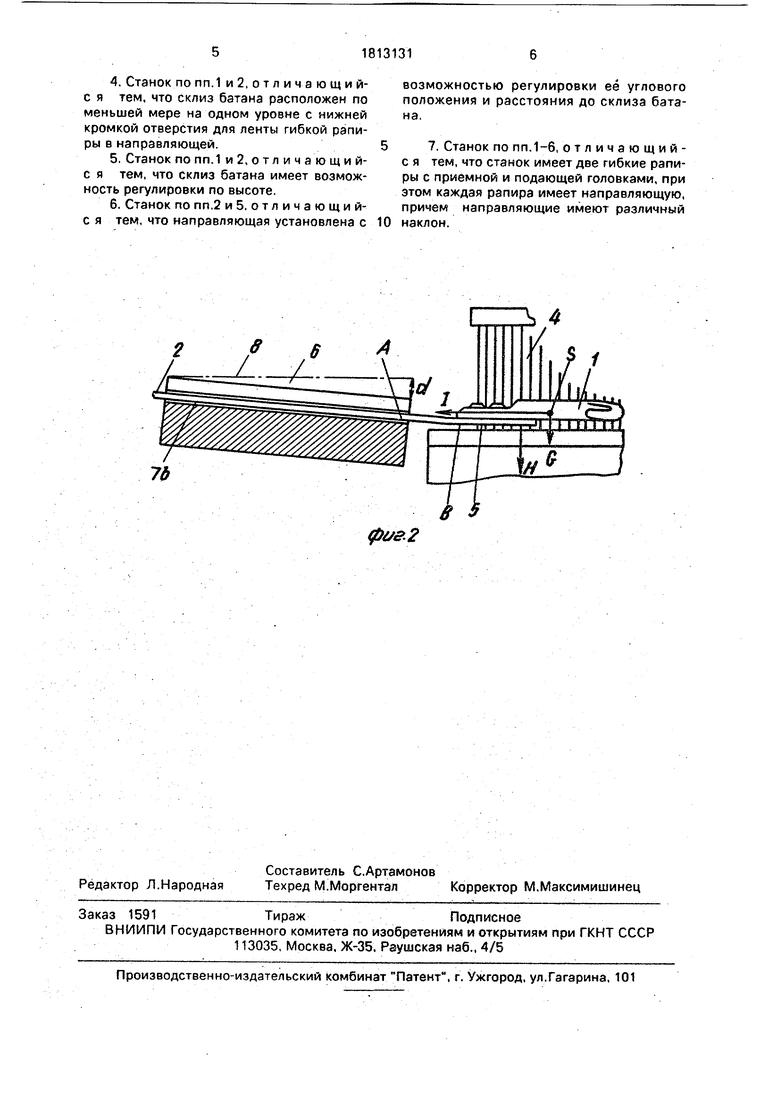
Сущность изобретения: рапирный ткацкий станок с гибкими рапирами 2 и захватными головками 1, центры тяжести которых лежат над верхней стороной ленты, имеет между шкивами 3 с лентами и зевом направляющие 6, которые обеспечивают наклонное движение лент 2 перед зевом. Благодаря этим направляющим 6. установленным с наклоном, может быть предотвращен отрыв захватных, головок 1 от склиза батана в зеве, в результате чего сокращается частота обрыва нитей основы. 6 з.п. ф-лы, 2 ил.
(pv&2
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079707C1 |
