fe

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИПОЛЯРНАЯ МАШИНА Н.Г.ЕРМИЛОВА | 1991 |
|
RU2031517C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
| Синхронный редукторный электродвигатель | 1989 |
|
SU1713077A1 |
| Линейный электромагнитный двигатель | 1980 |
|
SU936257A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1661930A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 1991 |
|
RU2034641C1 |
| Пороговый выключатель | 1978 |
|
SU736205A1 |
Использование: в электромашиностроении, в частности в качестве привода коммутационных аппаратов ив роботехнических устройствах. Сущность изобретения: линейный шаговый электродвигатель содержит немагнитный корпус, в котором установлены тяговые электромагниты, ферромагнитный стержень, на котором установлен якорь в виде двух независимых частей, каждая из которых состоит из магнитопроводящих шайб и кольцевых обмоток. Обмотки тяговых электромагнитов выполнены с возможностью согласного подключения с соседней обмоткой якоря, а обмотки различных частей якоря подключены к однофазной сети переменного тока через встречные диоды. Применение предложенной конструкции двигателя позволяет получить двусторонее перемещение стержня, а также повысить надежность за счет простой схемы коммутации обмоток. 3 ил. «
ИзобрёТение относится к электромашиностроению и может быть использовано в качестве привода коммутационных аппаратов, робототехнических устройств и т.п.
Цель изобретения - расширение эксплуатационных возможностей. v Новым в изобретении является использование монолитного подвижного узла фер- ромагнитного стержня в качестве внутреннего кольцевого магнитопровода, что значительно упрощает конструкцию двигателя, а также практическое исключение воздушного зазора между якорем и подвижным узлом, что дает возможность .повысить коэффициент полезного действия. Режим работы с минимальными зазорами между якорем и тяговыми электромагнитами дает возможность получить значительные тяговые усилия,; при минимальной мощности.
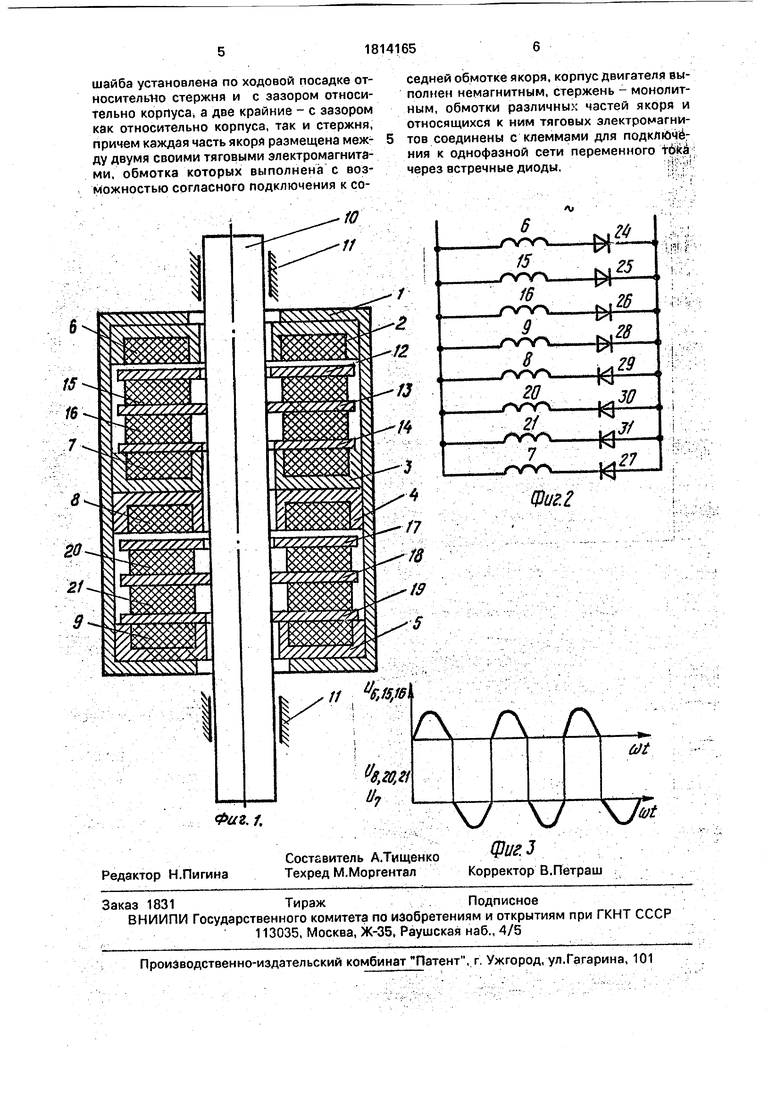
На фиг.1 дана кинематическая схема шагового электродвигателя; на фиг.2 - его электрическая схема; на фиг.З - диаграмма напряжений.
Линейный шаговый электродвигатель содержит неподвижную часть, включающую корпус 1 из немагнитного материала и жестко связанные с корпусом кольцевые тяговые электромагниты 2-5 с обмотками 6-9, и подвижную часть, включающую ферромагнитный цилиндрический стержень 10 и установленную с возможностью перемещения а направляющих 11, коаксиально установленный на стержне цилиндрический якорь в виде двух независимых частей: первая - с явновыраженными полюсами в виде трех
00
Ј
ел
магнитопроводящих шайб 12-14 и расположенными между ними двумя кольцевыми обмотками 15-16, жестко связанными между собой, например, с помощью клея, и вторая - в виде шайб 17-19 и обмоток 20-21, имеющая возможность возвратно-поступа- тельного перемещения со стержнем 10 и вдоль него, снабженные гибкими токопод- водами (на фиг. 1 не показаны), средние магнитопроводящие шайбы 15, 18установ- , лены по ходовой посадке относительно стержня 10 с зазором относительно корпу- са 1, а крайние шайбы 12, 14 и 17, 19 - с зазором как относительно корпуса 1, так и относительно стержня 10.
Обмотки 15-16 и 20-21 при подключе- нии к схеме питания создают относительно друг друга одноименные полюса магнитного поля, а относительно обмоток 6-7 и 8-9 - ; разноименные полюса. Обмотки 6-9 и ISIS, 20-21 подключены к сети переменного тока через диоды 24-30.
Линейный шаговый электродвигатель работает следующим образом.
При подаче переменного напряжения на схему питания обмоток за счет действия диодов 24-30 в положительный полупериод включаются кольцевые обмотки 6, 9,15-16, в результате чего обмотки 15, 16 создают встречные относительно друг друга магнитные поля, которые с помощью средней маг- нитопроводящей шайбы 13 первой части якоря вытесняются в зону стержня 10, что приводит к жесткому сцеплению с ним первой части якоря, и в то же время эта часть ;; якоря за счет взаимодействия с тяговым
электромагнитом 2 притягивается к последнему, преодолевая зазор между ними. В связи с тем, что этот зазор 2 составляет величину порядка 1 мм, сила притяжения находится на верхнем участке зависимости I Р f (5) для электромагнитов, где Р - сила . притяжения; 5- зазор, т.е. на участке, асим- птотически приближающемся кбесконечно- :сти, в результате стержень 10 .перемещается вверх на величину зазора, совершая полезную работу.
Для увеличения сцепления магнйтопро- водящей шайбы 4 со стержнем 10 зазор между ними заполняется магнитной жидкостью, которая удерживается в нем при отсутствии питания за счет остаточного намагничивания магнитопроводящей шайбы4-. . .... . .-.;.. . . . ..
Одновременно вторая часть якоря, CO- У стоящая из магнитопроводящих шайб и обмоток 20-21, под действием тягового .электромагнита 5 опус кается по стержню 10
вниз свободно за счет отсутствия питания обмоток 20-21.
В отрицательный полупериод питающего напряжения теряют питание обмотки
6,15-16,9 и включаются обмотки 7, 8, 20-21 за счет действия диодов 29-31, 27, и аналогично выбирается зазор между тяговым электромагнитом 5 И второй частью якоря, состоящей из магнитопроводящих шайб 17т
19 и обмоток 20-21, в результате чего стержень 10 перемещается вверх, совершай следующий шаг, в то время как первая часть якоря свободно опускается вниз на величину зазора за счет притяжения тягового электромагнита 3 и отсутствия питания обмоток 6, 15-16. В целом первая и вторая части якоря совершают челночные движения вверх-вниз, однонаправленно перемещая стержень 10 вверх.
Для обеспечения реверса схема управления должна быть дополнена переключателем между диодами и обмотками. Частота напряжения питания выбирается исходя из инерции якоря и необходимой скорости пёремещения стержня.
Применение предложенной конструкции дает возможность расширить эксплуатационные возможности двигателя за счет получения разнонаправленного перемещения линейного тягового органа, а также повысить надежность за счет применения монолитного тягового органа - ферромагнитного стержня и простейшей схемы коммутации обмоток электродвигателя
посредством встречно включенных диодов. Ф о р м у л а и з о б р е т е н и я Линейный шаговый электродвигатель,
-содержащий неподвижную часть, включающую корпус с кольцевым тяговым электро- магнитом, и подвижную часть, включающую ферромагнитный стержень и цилиндрический якорь с явновыраженными полюсами в виде магнитопроводящих шайб, установленный на стержне с возможностью воз- вратно-поступательного перемещения с ним и вдоль него, четыре кольцевые обмотки, причем тяговый электромагнит и якорь размещены последовательно вдоль стержня, от л и ч а ю щ и и с я тем, что, с целью расширения эксплуатационных возможностей, неподвижная часть снабжена дополнительными тремя кольцевыми тяговыми электромагнитами, кольцевые обмотки размещены между магнитопроводящим шайба- ми якоря, который выполнен в виде двух независимых частей, каждая из которых состоит из двух кольцевых обмоток, выполнен- .ных с возможностью подключения встречно
друг другу, и трех магнитопроводящих шайб
- двух крайних и одной средней, средняя
шайба установлена по ходовой посадке относительно стержня и с зазором относительно корпуса а две крайние - с зазором как относительно корпуса, так и стержня, причем каждая часть якоря размещена между двумя своими тяговыми электромагнитами, обмотка которых выполнена с возможностью согласного подключения к соседней обмотке якоря, корпус двигателя выполнен немагнитным, стержень - монолитным, обмотки различных частей якоря и относящихся к ним тяговых электромагнитов соединены с клеммами для подк/ибчё; ния к однофазной сети переменного t6ka; через встречные диоды.
| Линейный электродвигатель | 1985 |
|
SU1427512A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU155217A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
