Изобретение относится к электротехнике, в частности к линейным шаговым электродвигателям, которые находят применение в гибких производственных комплексах в машиностроении, приборостроении и других отраслях промышленности.
Известны линейные шаговые электродвигатели, содержащие активный якорь с зубчатыми полюсами, постоянными магнитами (обмотками возбуждения) и фазными обмотками [1].
Однако конструкция этих двигателей нетехнологична, требуется большой расход материалов при необходимости достижения длинноходовых перемещений с высокой точностью.
Для достижения таких перемещений конструкция должна включать в себя индуктор большой протяженности с нарезкой либо со сформированным иным способом протяженным слоем.
На большой протяженности (от единиц до десятков метров) выдержать точный шаг по зубцам затруднительно. При этом затрачивается значительное количество материалов.
Наиболее близким к изобретению по технической сущности является линейный шаговый электродвигатель, содержащий зубчатый индуктор и якорь с постоянным магнитом и двумя прилегающими к нему П-образными сердечниками, на средней части которых расположено по обмотке, а крайние части образуют полюса, снабженные одинаковыми зубцами с зубцовым делением, равным зубцовому делению зубцов индуктора, причем зубцы полюсов каждого сердечника сдвинуты между собой на 180 эл.град, а сдвиг зубцов на полюсах разных сердечников составляет 90 эл.град [2].
Недостатком этого двигателя является то, что он не обеспечивает достаточной точности перемещения и имеет нетехнологичную конструкцию.
Цель изобретения - повышение точности перемещения и повышение технологичности.
Для этого линейный шаговый электродвигатель снабжен магнитомягким беззубцовым гладким ярмом, а индуктор выполнен в виде замкнутой ленты с зубцами в виде магнитопроводных и немагнитных участков, все элементы якоря размещены внутри замкнутого индуктора, при этом якорь с индуктором установлены на магнитопроводящем ярме, длина которого больше длины двигателя на величину требуемого хода двигателя, причем якорь выполнен в виде секций, соединенных шарнирно с возможностью перемещения секций вокруг осей, параллельных нарезке зубцов.
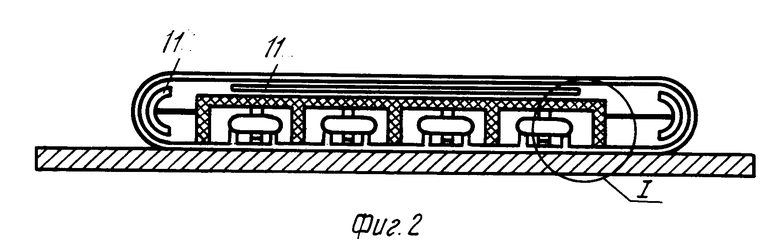
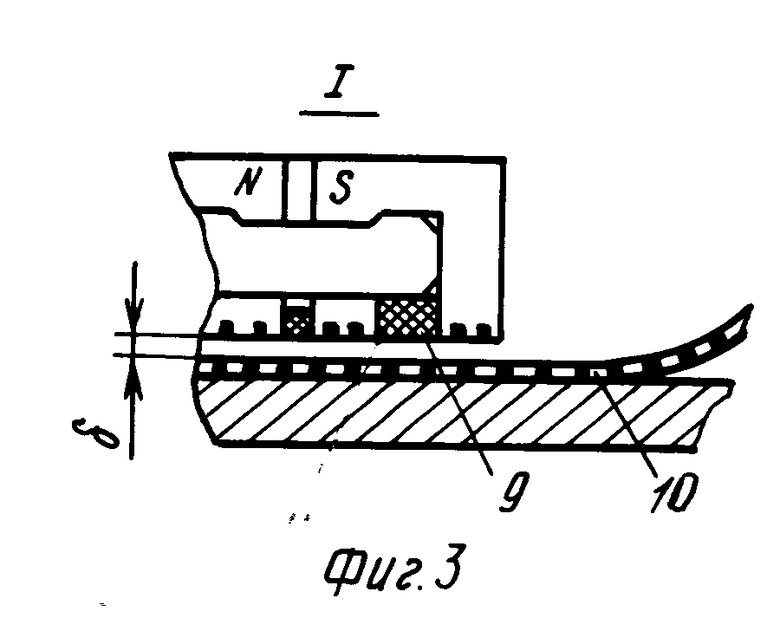
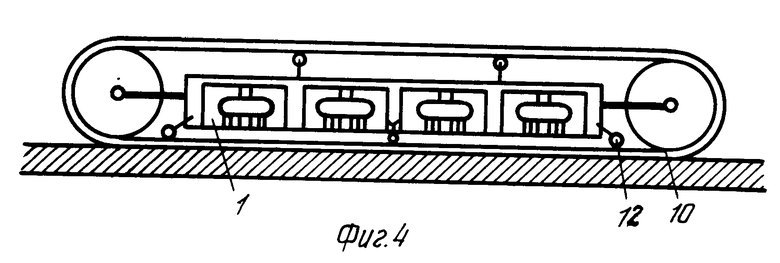
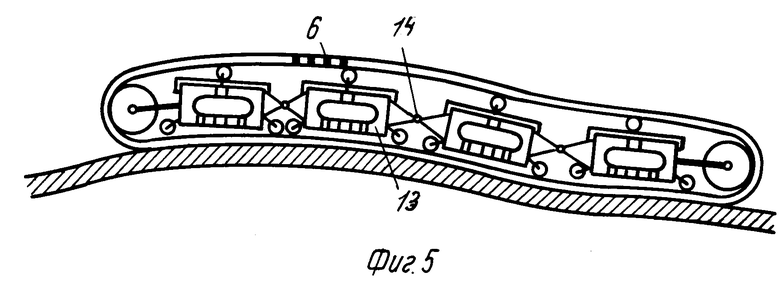
На фиг. 1 показан предлагаемый двигатель; на фиг. 2 - модификация двигателя на аэростатических опорах; на фиг. 3 - узел I на фиг. 2 (модуль двигателя); на фиг. 4 - модификация двигателя на опорах качения; на фиг. 5 - модификация двигателя с секционированным якорем.
Двигатель имеет активный якорь 1 с зубчатыми полюсами 2, магнитами возбуждения 3 и фазными обмотками 4, расположенными с зазором δ внутри замкнутого ленточного индуктора 5, в котором магнитомягкие зубцы 66 перемежаются с немагнитными промежутками 7. С наружной стороны индуктора 5 против рабочей поверхности якоря без зазора расположено протяженное беззубцовое гладкое магнитомягкое ярмо 8, длина Lя которого больше Lд двигателя на величину требуемого хода двигателя Lх.
В качестве опор якоря (фиг. 2, 3) может быть использована традиционная для высокоточных линейных шаговых электродвигателей аэростатическая опора. Тогда рабочая поверхность якоря 9 и внутренняя поверхность индуктора 10 должны быть гладкими и не пропускающими воздух, например, залиты пластмассами. Направляющие 11 для ленточного индуктора также должны содержать аэростатическую опору.
Двигатель может быть выполнен и с катящимиcя опорами (фиг. 4). При этом якорь с зазором δ опирается на внутреннюю поверхность индуктора 10 с помощью опор качения 12, а направляющие выполнены в виде роликов качения.
Для реализации перемещений по неплоским поверхностям (фиг. 5) якорь 1 выполняется из отдельных секций 13, связанных шарнирами 14 с осью вращения, параллельной нарезке зубцов 6.
Линейный шаговый электродвигатель работает следующим образом.
За счет наличия постоянных магнитов возбуждения или обмоток возбуждения, независимо от токового состояния фазных обмоток, двигатель развивает силу нормального притяжения к ярму индуктора, на порядок превышающую тангенциальное тяговое усилие. В результате обеспечивается надежное сцепление двигателя с ярмом, выполняющим одновременно роль гладкой направляющей движения. Это сцепление обеспечивается при любом положении двигателя и ярма в пространстве. Опоры и направляющие для охвата ленточным индуктором якоря обеспечивают гарантированные рабочие зазоры и свободное движение ленты вокруг якоря. При коммутации фазных обмоток, как и в известных технических решениях, возникает тяговое усилие между якорем и индуктором, и двигатель перемещается вдоль ярма подобно танку без проскальзывания, неся на себе ограниченной длины зубцовую зону индуктора. Ограниченность длины зубцовой зоны индуктора позволяет выполнить ее с высокой точностью расположения зубцов, что обеспечивает высокую точность длинноходовых перемещений.
При наличии изгибов ярма - направляющей движения - двигатель может их огибать, если якорь секционирован и секции связаны шарнирами с осью, параллельной зубцам.
При движении двигателя подобно гусенице якорь огибает неровности ярма, причем неравномерность рабочего зазора под каждой секцией оказывается невелика, и двигатель практически не ухудшает своих характеристик.
По сравнению с известными двигателями предлагаемый линейный шаговый электродвигатель создает возможность реализации линейных однокоординатных перемещений без необходимости выполнения длинномерной нарезки зубцовой зоны индукторов, что особенно важно при перемещениях от единиц до десятков метров.
В результате при наличии короткой ленты, где выдержать точный зубцовый шаг не представляет трудностей, и надежном сцеплении ленты индуктора с ярмом за счет использования больших сил одностороннего притяжения обеспечивается высокая точность перемещения, повышается технологичность конструкции, экономится материал, затрачиваемый обычно на формирование протяженных зубцовых структур индуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2030079C1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
Использование: в гибких производственных комплексах в машиностроении, приборостроении и других отраслях промышленности. Сущность изобретения: двигатель имеет активный якорь 1 с зубчатыми полюсами 2, магнитами возбуждения 3 и фазными обмотками 4, расположенными с зазором внутри замкнутого ленточного индуктора 5, в котором магнитомягкие зубцы 6 чередуются с немагнитными промежутками 7. С наружной стороны индуктора 5 против рабочей поверхности якоря без зазора расположено протяженное беззубцовое гладкое магнитомягкое ярмо 8, длина которого больше длины двигателя на величину требуемого хода двигателя. Опоры и направляющие для охвата ленточным индуктором якоря обеспечивают гарантированные рабочие зазоры и свободное движение ленточного индуктора вокруг якоря. Ограниченность длины зубцовой зоны индуктора позволяет выполнить ее с высокой точностью, что повышает точность перемещения. 1 з.п. ф-лы, 5 ил.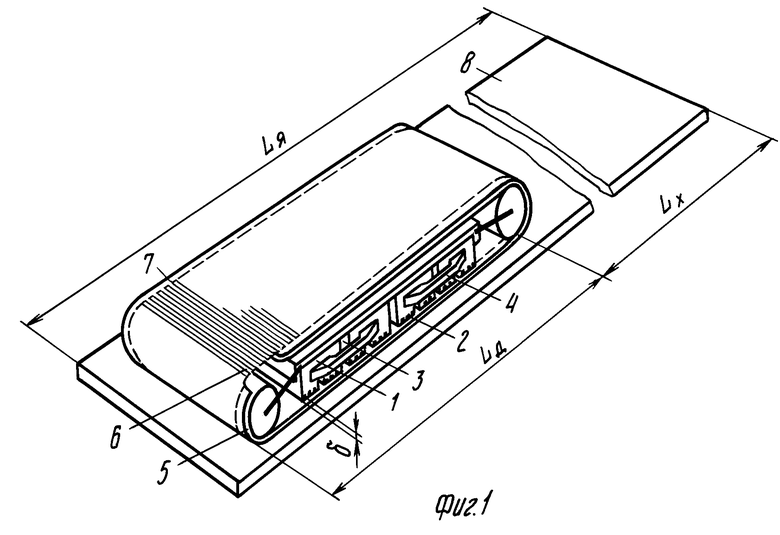
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
