Изобретение предназначено для стереометрического исследования снимаемой среды и может быть использовано, например при подводных съемках.
Целью изобретения является расширение функциональных возможностей путем наложения на телевизионное изображение дальномерного изображения в заданной полосе дальностей.
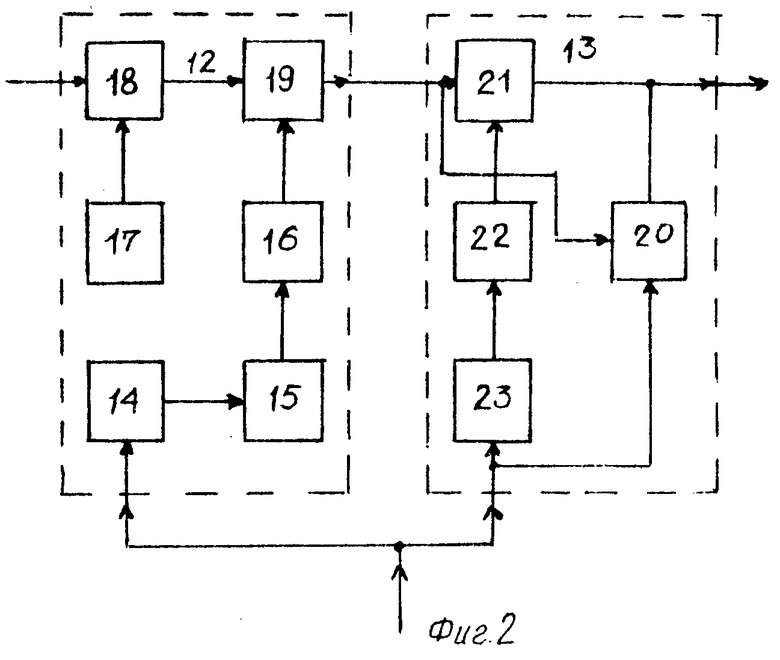
На фиг. 1 приведена общая структурная схема предлагаемой телевизионной системы, предназначенной для использования на подводном исследовательском аппарате; на фиг. 2 пример выполнения микшера, содержащего блок выборки и перекодирования и блок наложения.
Погружаемый аппарат предназначен для выполнения телевизионных съемок морского дна и подводных объектов в научных и прикладных целях. Передающее устройство 1 телевизионной системы размещено в двух водонепроницаемых боксах с прозрачной донной частью. В одном из боксов расположена передающая телекамера 2, а в другом сканирующий оптический (лазерный) локатор 3 (СЛЛ). Подводный аппарат снабжен также телевизионным светильником (не показано). Чтобы предотвратить нежелательное влияние отраженного света телевизионного светильника на работу СЛЛ, используется телевизионный йодо-таллиевый светильник со спектром излучения около 550 НМ, близким к окну прозрачности морской воды, а рабочий диапазон лазера составляет от 430 до 540 НМ. При этом фотоэлектронный умножитель СЛЛ снабжен светофильтром, подавляющим полосу излучения светильника.
Передающее устройство СЛЛ соединено кабель-тросом с приемным устройством 4, размещенным на судне обеспечения. Приемное устройство содержит видеоконтрольный блок 5, цифровой индикатор дальности 6, блок 7 управления цифровым индикатором дальности, выполненный, например, в виде светового пера, и блок 8 обработки дальномерного сигнала, включающий в себя корректор 9 дальномерного сигнала и преобразователь 10 частоты сканирования СЛЛ в частоту телевизионной развертки. Кроме того, в приемное устройство СЛЛ входит микшер 11, содержащий блок 12 выборки и перекодирования (БВП) и блок 13 наложения (БН). Выход БВП 12 соединен с первым входом БН 13. Второй вход БВП 12 и второй вход БН 13, соединены с первым входом микшера 11, подключенным к выходу передающей телекамеры 2. Первый вход БВП 12 является вторым входом микшера и соединен с выходом блока 8 обработки дальномерного сигнала, а выход БН 13 является выходом микшера 11 и подключен к входу в видеоконтрольный блок 5.
БВП 12 (фиг.2) содержит соединенные последовательно селектор 14 импульсов кадровой развертки, вход которого подключен к выходу телекамеры, делитель 15 частоты с перестраиваемым коэффициентом деления, включающий в себя, например, пакетный переключатель, и циклический счетчик 16. Кроме того БВП содержит соединенные последовательно формирователь L/N 17, где L установленная максимальная дальность измерений и N коэффициент пересчета счетчика 16, входной делитель 18, второй вход которого соединен с выходом блока 8 обработки дальномерного сигнала, и схему 19 равнозначности, второй вход которой соединен с выходом счетчика 16.
БН 13 включает в себя первый нормально открытый электронный ключ 20, второй нормально открытый электронный ключ 21 и пороговое устройство 22, настроенное на пропускание сигналов, уровень которых составляет половину динамического диапазона сигнала изображения. При использовании цветной телесистемы перед пороговым устройством 22 расположен фильтр 23 для подавления поднесущих цвета. Вход первого ключа 20 и вход фильтра 23 соединены с выходом телевизионной камеры 2. Управляющий вход ключа 20 и сигнальный вход ключа 21 соединены с выходом схемы равнозначности 19, входящей в состав БВП 12, а их выходы подключены к выходу видеоконтрольного блока 5.
Для синхронизации работы преобразователя 10 и видеоконтрольного блока 5, преобразователь связан с выходом телевизионной камеры через селектор импульса строчной и кадровой развертки (не показано).
Заявленная телевизионная система работает следующим образом.
После опускания погружаемого аппарата с судна в воду на рабочую глубину производится включение светильника передающей телекамеры 2 и СЛЛ 2 по сигналу с судового пульта управления. Телевизионный сигнал поступает по кабель-тросу через нормально открытый первый ключ 20 на видеоконтрольный блок 5. Одновременно производится сканирование лазерным лучом снимаемых объектов в поле зрения телекамеры 2. работа СЛЛ 3, корректора 9 и преобразователя 10 кратко состоит в следующем. Излучение лазера модулируется по яркости. Отраженный от объектов свет лазера поступает в фотоумножитель. Разность фаз отраженного и опорного сигналов, пропорциональная дальность, преобразуется и в цифровом виде передается по кабель-тросу на вход корректора 9 вместе с сигналами направления луча на момент измерения. На этапе обработки сигналов дальности корректор 9 выполняет их усреднение и коррекцию для снижения уровня помех и ошибок. Цифровые значения дальности поступают из корректора 9 в кадровое запоминающее устройство преобразователя 10 и далее выводятся на телевизионной частоте в соответствии с телевизионной разверткой.
БВП 12 работает следующим образом. Селектор 14 импульсов кадровой развертки выделяет времязадающие импульсы из передаваемых по кабель-тросу телевизионных полукадров и подает их через делитель частоты 15 на счетчик 16. Коэффициентом пересчета счетчика 16 задается разрешающая способность по дальности изображения видеоконтрольного блока 5 от сканирующего локатора, которая выражается как L/N. На делителе 15 частоты с перестраиваемым коэффициентом деления устанавливается требуемая длительность цикла выборки покадровых данных локатора для заданного коэффициента пересчета счетчика 16.
Если коэффициент пересчета N счетчика 16 равен 100, то при коэффициенте деления 1 длительность цикла равна 2 с (100:50 полукадров/ с 2 с). При коэффициенте деления 2 длительность цикла равна 4 с и т.д. Оптимальная длительность цикла выборки составляет от 2 до 10 с и устанавливается оператором с помощью пакетного переключателя делителя 15 в зависимости от характера снимаемых объектов.
Циклически нарастающие выходные сигналы счетчика 16 в параллельном двоичном коде выводятся на схему равнозначности 19. Одновременно с этим в делитель 18 преобразователя 10 выводятся (также в двоичном параллельном коде) данные дальности. В делитель 18 поступает также значение L/N из формирователя 17. При этом используются одни и те же единицы измерения дальности в данных оптического локатора формирователя 17. На входном делителе 18 масштаб значений дальности от дальномера производится в соответствии с масштабом отсчетов счетчика 16. Дробная часть результата деления на делителе 18 отбрасывается, а целочисленная часть в двоичном параллельном коде передается на первый вход схемы равнозначности. При выбранном коэффициенте деления делителя 14, равном 1, в течение каждого отсчета выборка будет производиться из одного полукадра преобразованного цифрового изображения локатора. При коэффициенте деления, равном 2, выборка будет производиться из двух полукадров и т.д. Момент вывода каждого значения дальности из преобразователя 10 соответствует определенной точке телевизионного изображения при развертке. Каждый раз, когда в процессе вывода полукадровых значений дальности из преобразователя 10 (после преобразования значений в делителе 18) значения сигнала на выходе делителя 18 совпадают с состоянием счетчика 16, на схеме равнозначности 17 вырабатывается импульсный сигнал.
БН 13 работает следующим образом. Сигнал с выхода схемы равнозначности подается на управляющий вход нормально открытого электронного ключа 20 и запирает его, поэтому сигналы от телекамеры 2 не поступают на видеоконтрольный блок. Одновременно импульсный сигнал с выхода схемы равнозначности 19 поступает на сигнальный вход нормально открытого ключа 21. При уровне сигнала изображения телекамеры 2, меньшем половины динамического диапазона, он задерживается пороговым устройством 22, и ключ 21 остается открытым. Импульсный сигнал с выхода схемы равнозначности 19, уровень которого соответствует максимальному уровню телевизионного сигнала, поступает на вход видеоконтрольного блока 5, заменяя собой слабый телевизионный сигнал. Если же уровень телевизионного сигнала выше половины динамического диапазона, то он пропускается пороговым устройством 22 и запирает ключ 21, поэтому сигнал на входе видеоконтрольного блока 5 отстутствует. Таким образом, вся подкадровая информация о дальности, которая накапливается и обновляется в кадровой памяти устройства преобразования частоты сканирования дальномера в частоту телевизионных кадров, при выборке разбивается на группы в зависимости от значений дальности и последовательно по группам выводится в перекодированном виде в порядке возрастания дальности с помощью БВП и БН. При этом расположение перекодированной точки на экране, для которой производится выборка цифрового значения, сохраняется. Перекодирование заключается в том, что цифровые значения дальности для каждого участка развертки преобразуются в пропорциональный этой дальности временной интервал от нулевого состояния счетчика, соответствующего минимальному расстоянию, до отсчета, во время которого вместо этого значения вырабатывается сигнал для вывода его на экран в виде точки с измененной яркостью. В этом случае яркость элементов изображения для выделяемой счетчиком полосы дальности меняется на противоположную. Элементы изображения от телекамеры, плотность которых меньше среднего значения, становятся максимально плотными и, наоборот, более плотные участки преобразуются в максимально яркие.
В каждый момент времени на экране представлена не вся кадровая информация оптического дальномера, а только та ее часть, которая находится в пределах полосы дальности, задаваемой отсчетом счетчика БВП. При этом участок с измененной яркостью, занимаемый этой информацией на экране, непрерывно и последовательно смещается по мере роста отсчета счетчика, следовательно недоступных для восприятия участков изображения в течение одного цикла не остается. За один цикл выборки, длящийся от 2 до 10 с, на экран последовательно выводится аналоговая информация о дальности до всех объектов в поле зрения системы. Длительность цикла устанавливается оператором с помощью делителя частоты с перестраиваемым коэффициентом деления. Путем такого изменения яркости участков изображения происходит последовательное "ощупывание" наблюдаемой сцены по дальности. Постоянно имея перед собой высококачественное изображение, наблюдатель в то же время получает циклически повторяющуюся кодированную яркостью дальностную информацию о всех объектах и их частях, представленных на экране. Обозначение дальности по всему полю изображения измененной яркостью позволяет наблюдателю строить трехмерный, объемный образ наблюдаемой среды.
Для большей наглядности изображения начальный момент отсчета счетчика 16, т.е. минимальное расстояние от телекамеры может сигнализироваться звуковым индикатором. Помимо информации о дальности до наблюдаемых объектов, представляемой в аналоговой перекодированной форме на телевизионном экране, точные значения дальности для определенного участка изображения, выбранного оператором по экрану с помощью светового пера, поступают на цифровой индикатор 6 значений дальности. Кроме того, цифровые значения дальности могут выводиться в накопитель на магнитной ленте.
Таким образом, совокупное применение телевизионной системы, сканирующего двухкоординатного оптического локатора, БВП и БН обеспечивает достижение поставленной цели.
Основным преимуществом предлагаемой телевизионной системы по сравнению с известными является возможность получения значений дальности по всей площади телевизионного кадра. В такой системе проявляется совокупность положительных свойств каждого из входящих в нее устройств: высокое качество телевизионного изображения на экране при наглядной аналоговой и цифровой информации о рельефе наблюдаемой среды. Возможность оперативного получения дальности открывает новые возможности при дистанционном стереометрическом исследовании подводной, наземной или космической среды. Применение предложенной телевизионной системы упрощает выполнение различных операций при производстве подводных технических работ, позволяет устанавливать пространственное положение, размеры и объем объектов на морском дне и т.п. Расходы на разработку и создание предложенной системы, незначительны, так как составляющие ее устройства телевизионная система и сканирующий оптический локатор по отдельности существуют и широко применяются.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНОЕ ВИДЕОКРЫЛО | 2007 |
|
RU2332328C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СТЕРЕОТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2030119C1 |
| Устройство для контроля видеосигнала | 1982 |
|
SU1069190A1 |
| СИСТЕМА АНАЛИЗА ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1984 |
|
SU1840694A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ КОМПЬЮТЕРНОЙ РЕГИСТРАЦИИ СИГНАЛА ИЗОБРАЖЕНИЯ ИНТЕРФЕРОГРАММ | 2012 |
|
RU2489806C1 |
| Имитатор визуальной обстановки тренажера транспортного средства | 1985 |
|
SU1282188A1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО КОНТРОЛЯ ДОМЕННОЙ СТРУКТУРЫ ФЕРРИТ-ГРАНАТОВЫХ ПЛЕНОК | 1990 |
|
RU1769615C |
| УСТРОЙСТВО ДЛЯ ВВОДА И СРАВНЕНИЯ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 1993 |
|
RU2096922C1 |
| Устройство для измерения дальности по параллактическому углу | 1988 |
|
SU1696863A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ДВИЖУЩЕМСЯ ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ | 1997 |
|
RU2138077C1 |
Изобретение относится к телевизионным системам для стереометрического исследования снимаемой среды и может быть использовано для подводных съемок. Цель изобретения расширение функциональных возможностей путем наложения на телевизионное изображение дальномерного изображения в заданной полосе дальностей. В передающем устройстве 1, содержащем телевизионную передающую камеру 2 и двухкоординатный сканирующий оптический локатор 3 формируются телевизионный сигнал и сигнал дальности объектов наблюдения. Видеосигнал в приемном устройстве 4 наблюдается видеоконтрольным блоком 5, а сигнал дальности объектов наблюдения в блоке 8 обработки дальномерного сигнала преобразуется в видеосигнал, который с помощью микшера 11 вводится в изображение, наблюдаемое на экране видеоконтрольного блока 5. Микшер 11, содержащий блок 12 последовательной по дальности выборки и перекодирования и блок 13 наложения, обеспечивают наложение на видеосигнал сигнала объектов, находящихся на определенном расстоянии от передающего устройства 1. 3 з.п. ф-лы, 2 ил.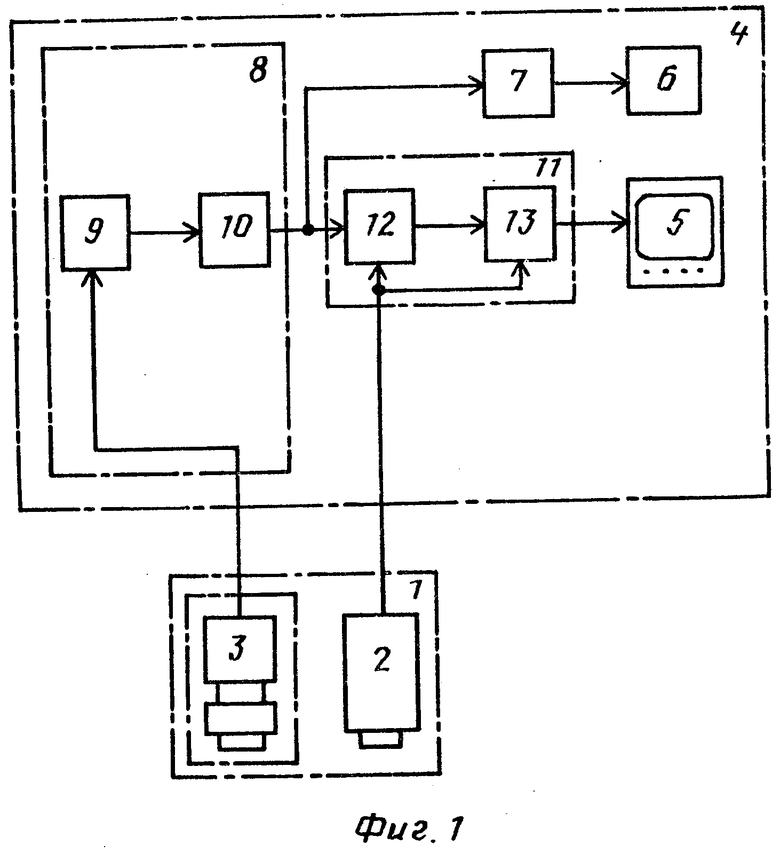
| Авторское свидетельство СССР N 1676431, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
