Изобретение относится к электротехнике и может быть использовано при автоматизированных испытаниях линейных асинхронных двигателей (ЛАД), в том числе ЛАД со вторичным элементом Ограниченной длины/
Цель изобретения - повышение точности определения статической характеристики и расширение возможности определения динамических характеристик линейных асинхронных двигателей.
Поставленная цель достигается тем/что способ, включающий совместную обработку
зависимостей от времени, скорости и силы сопротивления движению подвижной части двигателя, полученных путем последовательного проведения опытов двух видов, в одном из которых измерения производят в процессе свободного разгона ПЧ двигателя после его подключения к питающей сети, а во втором - в процессе торможения ПЧ упругим элементом, для чего перед включением двигателя ее разгоняют другим, предварительно деформированным упругим элементом двигателя, для чего ПЧ устанавливают меж00
Jk
VI
g
00
ДУ упругими элементами и, периодически включая и отключая двигатель, возбуждают колебания, кроме того, проводят серию опытов, повторяя первый при различных массах ПЧ, второй - при различных частотах включений и длительностях включенных состояний двигателя и оба - при различных отклонениях напряжения питающей сети от номинального, ив каждом опыте дополнительно измеряют тепловое отклонение сопротивления обмотки статора и зависимости от времени координаты ПЧ, напряжения, тока и угла f фазового сдвига между ними, а обработку результатов измерений предварительно ведут по каждому опыту, где величины напряжения Ui и коэффициента мощности cos p в 1-й момент времени, измеренные при тепловом отклонении сопротивления обмотки ARi приводят к единой для всех опытов заданной температуре, после чего из полученных в каждом опыте зависимостей от времени величин усилия F, тока, напряжения, cos p, скольжения и ускорения устанавливают их взаимные зависимости и затем путем совместной их обработки из всей серии опытов определяют статическую и динамические характеристики двигателя в виде приведенных к заданному номинальному напряжению зависимостей усилия, тока и cos от скольжения и от ускорения. Кроме того, исключают влияние обусловленной односторонним магнитным притяжением ПЧ силы электромагнитного трения, которую предварительно измеряют как силу сопротивления перемещению ПЧ с постоянной скоростью, не превышающей 5% разности синхронной и критической скоростей двигателя, при различных значениях постоянного тока fi, пропускаемого через две фазные обмотки, соединенные между собой своими концами, а затем при определении характеристик ее добавляют к вычислительным значениям тягового усилия, причем для определения этой силы в каждой точке i характеристики используют ее зависимость от тока I//, а его величину в данной точке i оценивают с помощью определенного соотношения.
Для достижения той же цели устройство, содержащее упругие элементы, измерительную систему с каналами измерения скорости и ускорения и регистратором, упругие элементы выполнены съемными с возможностью наложения упругой связи ПЧ со статором на всем протяжении ее хода в одних опытах и полного исключения упругой связи в других опытах: кроме того, устройство дополнительно снабжено регулируемым источником постоянного тока, приводом равномерного перемещения, выполненным с
возможностью присоединения к ПЧ двигателя, измерителем активного сопротивления, силовым блоком периодических включений двигателя с регулируемыми частотой и длительностью включенных состояний, а в измерительную систему дополнительно введены каналы измерения напряжения, тока и фазового сдвига между ними, причем в качестве регистратора использован цифровой запоминающий блок.
Фиг.1 и 2 иллюстрируют возможности предлагаемого способа. На фиг.1 представлены графики зависимостей от времени координаты перемещениях X(t), скорости V(t)
и ускорения a(t) подвижной части, а также скольжения S(t) двигателя, относящиеся к одному из опытов, полученные в процессе обработки данных этого опыта и выведенные для контроля на графопостроитель
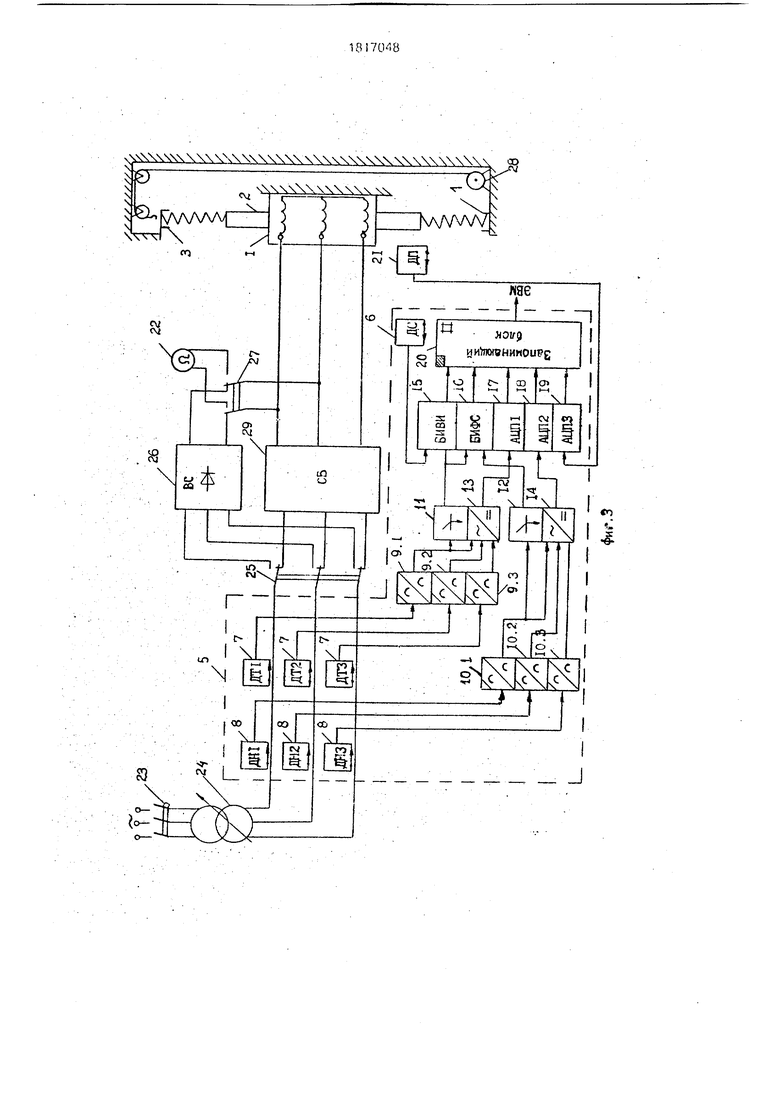
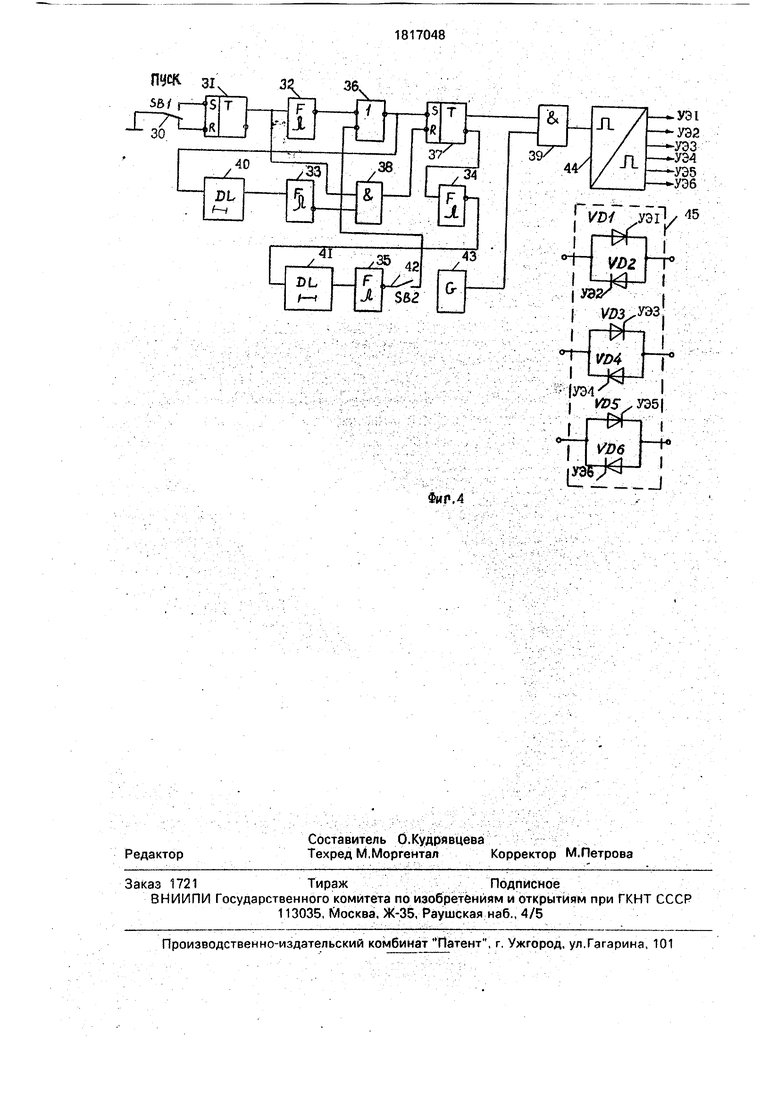
ЭВМ; на фиг.2 - рабочие характеристики двигателя, полученные в результате совместной обработки на ЭВМ данных серии опытов и выведенные на графопостроитель. На фиг.3 представлена схема устройстна, реализующего данный способ определения характеристик линейных асинхронных двигателей; на фиг.4 - функциональная схема силового блока для периодических включений двигателя. Устройство содержит статор
1 и подвижную часть 2 испытуемого линейного двигателя, узел упругой связи, состоящий из упругих элементов 3 и 4, измерительную систему 5, состоящую из датчика скорости 6, датчиков фазного тока 7, датчиков фазного
напряжения 8 и соответствующими масштабирующими преобразователями 9.1, 9.2 9.3 - по числу фаз и масштабирующими преобразователями 10.1, 10.2, 10.3, нуль-компаратор 11 и 12, соответственно, тока и напряжения,
первого и второго выпрямителей 13 и 14, блока измерения временных интервалов (БИВИ)
15. блока измерения фазового сдвига (БИФС)
16. первого, второго и третьего аналого-циф- ровых преобразователей (АЦП) 17, 18 и 19,
запоминающего блока 20, Кроме того, устройство содержит датчик перемещения (ДП) 21, микроомметр 22, автоматический выключатель 23, регулируемый трехфазный источник напряжения 24, переключатель 25.
силовой выпрямитель 26, двухполюсный переключатель 27, электролебедку со стабилизированной скоростью 28 и силовой блок 29. Силовой блок (СБ) (см.фиг.4) содержит тумблер пуска 30, триггер пуска 31, формирователи 32, 33, 34 и 35 узких импульсов, элемент ИЛИ 36 с инверсными входами и выходами, триггер управления 37, элементы И 38 и 39, узлы задержки 40 и 41, тумблер 42, генератор импульсов 43, формирователь
44 импульсов управления тиристорами, ти- ристорный блок 45.
Примером осуществления данного способа является следующая методика определения характеристик короткоходовых линейных асинхронных двигателей (с длиной хода от 0,1 до 1,5м).
Испытываемый двигатель устанавливают вертикально и проводят серию опытов первого вида, изменяя отопыта к опыту подведенное к двигателю напряжение и присоединенную к подвижной части (ПЧ) добавочную массу. В каждом опыте п двигатель включают на время, достаточное для совершения одного хода ПЧ, и при ее разгоне измеряют, с помощью запоминающего блока регистрируют в фиксированные моменты времени I (совпадающие с моментами прохождения ПЧ заданных дискрет пути) действующие значения напряжения Um. тока lin и угла
f n фазового сдвига между ними, а также мгновенные значения скорости Vin и интервалы времени тт прохождения ПЧ дискрет пути hjn. В массивы результатов опыта вносят также величину массы ПЧт (с учетом присоединенной) и замеренную непосредственно после опыта величину омического сопротивления обмотки двигателя Rn. Затем между статером и ПЧ двигателя устанавливают упругие элементы и проводят опыты второго вида, в которых двигатель периодически подключают на заданное время к питающей сети и.этим возбуждают колебания ПЧ. Проводят серию таких опытов при различных частотах включений, длительностях включенных состояний и величинах напряжения на входе двигателя. При этом благодаря колебательному движению ПЧ реализуют различные режимы двигателя - режимы ускоренного двигателя, начиная со скорости не равной нулю; режимы движения с замедлением, то есть с отрицательным ускорением, и режим движения с постоянной скоростью во всем рабочем диапазоне ее значений, в том числе и с синхронной скоростью (при приближении к резонансной частоте колебаний), которое имеют место в промежутках между первыми и вторыми режимами/Во время включенных состояний двигателя измеряют и регистрируют те же величины, что и в опытах первого вида.
Дополнительно проводят J опытов по определению сил электромагнитного трения. Через две фазные обмотки двигателя, соединенные между собой своими концами, пропускают различный для каждого опыта j постоянный ток fij, а ПЧ двигателя при этом перемещают с постоянной скоростью, не превышающей 5% разности синхронной
и критической скорости. В каждом опыте измеряют силу сопротивления перемещению ПЧ и формируют массив данных F3j (ju i) ,2,..., J). Затем данные всех опытов совместно обрабатывают на ЭВМ.
Возможны другие варианты реализации данного способа. В одном из них, например, мгновенные значения усилия сопротивлению перемещения ПЧ (Fin) в опытах первого
и второго видов измеряют непосредственно и обходятся без регистрации дискрет пути hi. Устройство (фиг.З), реализующее предложенный способ, работает следующим образом.
Перед проведением опытов первого вида упругие элементы 3 и 4 отсутствуют, подвижная часть 2 находится в нижнем положении, блоки 15:20 измерительной системы подготовлены к работе, автоматический выключатель 23
включен, контакты переключателя 25 находятся в нижнем положении, а переключателя 27 - в левом положении, как показано на фиг.З, тумблеры 30 и 42 СБ выключены (см.фиг.4), триггеры 31 и 37 сброшены, то есть их прямые
выходы находятся под потенциалом лог.О. Поэтому импульсы, частота следования которых порядка 50 кГц, не проходят с генератора 43 через элемент И 39 на формирователь импульсов 44, и тиристорный блок 45 находится в отключенном состоянии. После включения тумблера 30 триггер пуска 31 устанавливается, формирователь 32 выдает узкий импульс напряжения лог.О, который, проходя через элемент ИЛИ 36 на вход триггера управления
37, устанавливает его. Потенциал лог.1, поступающий с прямого выхода триггера 37 на вход элемента И 39, разрешает прохождение через него импульсов генератора, и с формирователя 44 начинают поступать импульсы управления на тиристорный блок 45, который включается и подает питающее напряжение на обмотку статора 1. Происходит ускоренное движение подвижной части 2, в процессе которого датчик скорости 6 выдает
импульсы, период следования которых измеряется с помощью блока измерения временных интервалов 15, мгновенные значения фазных величин тока и напряжения, получаемые с помощью соответствующих датчиков
7,8 и масштабирующих преобразователей 9.1, 9.2, 9.3 и 10.1, 10.2, 10.3, преобразуются с помощью выпрямителей 13 и 14 в сигналы, пропорциональные по уровню напряжения действующим значениям тока и напряжения,
которые измеряются с помощью первого АЦП 17 и второго АЦП 18. Нуль-компараторы 11 и 12 в моменты перехода через нуль мгновенных значений тока и напряжения формируют импульсы, интервалы времени между которыми измеряются с помощью блока измерения фазового сдвига 16. Результаты всех измерений за время перемещения ПЧ из нижнего положения в верхнее заносятся в запоминающий блок 20. а по окончании опыта пересылаются в ЭВМ для хранения и дальнейшей совместной обработки. После завершения хода ПЧ силовой блок отключает двигатель. Это происходит автоматически, с помощью узла задержки 40, который после поступления пускового импульса на его вход (и одновременно - на S-вход триггера 37) через установленное время инициирует у формирователя 33 импульс лог.О, который, проходя через элемент И 38, сбрасывает триггер 37. Сразу после выключения двигателя переключатель 27 переводится в. правое положение, благодаря чему микроомметр 22 подключается к началам двух фазных обмоток статора 1 и производится измерение их сопротивле- ния. При повторении опытов работа устройства происходит аналогично. Для подачи вновь напряжения на двигатель тумблер 30 необходимо вернуть в исходное положение, т.е. произвести сброс триггера пуска 31, а затем включить.
Перед проведением опытов второго вида устанавливаются упругие элементы 3, 4, а СБ переводится на режим периодического включения с помощью тумблера 42, кон- такты которого во включенном положении замыкают цепь автоустановки триггера управления 37.
Пуск СБ 29 производится также, как и в опытах первого вида. После отработки пер- вого цикла включения-отключения двигателя на инверсном выходе триггера управления 37 появляется потенциал лог.1, а на выходе формирователя 34 - узкий импульс. Через установленное время после поступления этого импульса в узел задержки 41, который определяет время отключения состояния двигателя, на выходе формирователя 35 появляется импульс напряжения лог.О, который, проходя через замкнутые контакты тумблера 42 и элемент ИЛИ 36, устанавливает триггер 37 и запускает узел задержки 40, определяющий длительность включенного состояния двигателя. Таким образом происходит повторное включение, после че- го описанный цикл включения-отключения многократно повторяется, то есть, СБ периодически подключает двигатель к питающему напряжению и отключает его с заранее установленными длительностями включен- ных и отключенных состояний, сумма которых равна периоду вынужденных колебаний ПЧ. В зависимости от соотношения частоты этих колебаний и собственной частоты упруго подвешенной ПЧ. а также от длительности включенных состояний устанавливаются колебания с той или иной амплитудой в пределах максимально возможного хода ПЧ. Сразу после установления колебаний запускается измерительная система 5, с помощью которой, так же как и в опытах первого вида, производятся измерения интервалов времени между импульсами датчика скорости 6, тока, напряжения и фазового сдвига между ними и запоминание результатов на протяжении нескольких циклов включения двигателя. Дополнительно с помощью датчика 21 и третьего АЦП 19 измеряются мгновенные значения координаты ПЧ. Затем тумблером 30 СБ выключается. Каждый опыт заканчивается измерением сопротивления обмотки статора 1 таким же образом, как и в опытах первого вида.
Для проведения дополнительных опытов по определению влияния силы электромагнитного трения в зависимости от тока намагничивания выключается автоматический выключатель 23, выходы регулируемого источника напряжения 24 с помощью переключателя 25 отключаются от входов СБ и подключаются к входам силового выпрямителя 26, выходы которого с помощью переключателя 27 подключаются к началам двух фазных обмоток статора 1 (см.фиг.3), упругие элементы 3. 4 снимаются, конец троса электролебедки 28, снабженной регулируемым приводом постоянной скорости (на чертеже не показан), соединяется с верхним концом ПЧ.
Работа устройства при проведении этих опытов происходит следующим образом.
После включения автоматического выключателя 23 пониженное, по сравнению с предыдущими опытами, напряжение подается на силовой выпрямитель 26. По двум фазным обмоткам статора 1 протекает постоянный ток, создающий в рабочем зазоре двигателя неподвижный магнитный поток, близкий по величине к потоку двигателя в режиме холостого хода, наблюдаемом в опытах колебательного движения, когда скорость движения ПЧ приближается к синхронной (скорости движения магнитного поля двигателя), При этом с помощью электролебедки 28 ПЧ передвигается с постоянной скоростью, не превышающей 5% разности синхронной и критической скоростей, а ток и сила сопротивления движению, равная при вертикальном расположении двигателя сумме сил тяжести и электромагнитного трения, измеряются с помощью измерительной системы 5 и датчика усилия (на чертеже не показан). Результаты измерений также пересылаются из запоминающего блока 20 в ЭВМ для дальнейшей совместной обработки их с данными всех опытов первого и второго вида, результатом которой является семейство рабочих характеристик при различных заданных значениях ускорения ПЧ. в том числе при нулевом значении, то есть совокупность динамических, и статических характеристик, в виде таблиц и графиков.
Использование предлагаемого способа обеспечивает получение кратковременных статических режимов двигателя в окрестности центра колебаний упруго подвешенной подвижной части, когда она движется с постоянной скоростью, которую благодаря регулированию частоты включений двигателя и длительности включенных состояний можно изменять в пределах (0,1:1) Vs, и измерение с. помощью автоматической системы измерений величин тягового усилия, скорости, напряжения, тока и фазового сдвига между ними в этих режимах, что повышает точность и расширяет возможности определения статических характеристик линейных асинхронных двигателей.
Кроме того, исключается влияние изменения во время опыта напряжения источника и теплового отклонения активного сопротивления обмотки двигателя на точность определения характеристик благодаря приведению данных всех опытов к номинальному напряжению и единой заданной температуре обмотки.
Использование предлагаемого устройства обеспечивает создание колебательного движения испытуемого двигателя с регулируемыми частотой включений и длительностью включенных состояний, необходимых для получения кратковременных, но достаточных для наблюдения статических режимов, а также позволяет измерять дополнительно быстро изменяющиеся в каждом опыте напряжение, ток и угол фазового сдвига между ними, необходимые для построения всех рабочих характеристик двигателя. Кроме того, обеспечивает быстрое запоминание и хранение данных опытов для совместной их обработки и определения семейства динамических характеристик и измерится дополнительно усилие электромагнитного трения в зависимости от тока намагничивания.
Все это позволяет определять рабочие характеристики с достаточно высокой точностью, необходимой для оперативного изучения влияния изменений конструкции при разработке и исследовании новых типов линейных машин, а также измерений их режимов и схем запуска. Имеющиеся преимущества особенно важны при испытаниях линейных асинхронных двигателей с ограниченной длиной хода, так как обеспечивают получение информации за характерные для них, короткие промежутки времени разгона, равномерного движения и торможения. Применение недорогостоящей серийной отечественной аппаратуры даст
возможность полной автоматизации испытаний таких двигателей в любой исследовательской лаборатории или же на заводском испытательном стенде.
Формула изобретения
. 1. Способ определения характеристик линейных асинхронных двигателей, включающий измерение зависимостей от времени скорости и силы сопротивления движению подвижной части двигателя в режиме свободного разгона и режиме торможения и их совместную обработку, отличающийся тем, что, с целью повышения точности определения статической характеристики и расширения возможности определения
динамических характеристик, в режиме торможения дополнительно осуществляют измерения при разгоне и равномерном движении, а также при различных частотах включений и длительностях включенного состояния двигателя. режим свободного разгона осуществляют при различных массах подвижной части и оба режима - при различных отклонениях напряжения питающей сети от номинального значения, в каждом режиме дополнительно измеряют тепловое отклонение сопротивления обмотки статора и зависимости от времени положения подвижной части двигателя, напряжения, тока и угла фазового сдвига между ними, определяют в каждом режиме приведенные значения напряжения и косинуса угла фазового сдвига между током и напряжением статора двигателя в соответствии с выражениями соответственно
0
5
где Ui - измеренная величина напряжения статора в i-й момент времени, В;
cos p - измеренная величина косинуса угла фазового сдвига между током и напряжением статора в i-й момент времени;
ARi - тепловое отклонение сопротивления обмотки статора двигателя, Ом;
li - измеренная величина тока в i-й момент времени,приводят к единой для всех режимов заданной температуре, после чего из полученных зависимостей от времени тягового усилия, тока и напряжения статора двигателя, косинуса угла фазового сдвига между ними, скольжения и ускорения устанавливают их взаимные зависимости и затем определяют статическую и динамическую характеристики двигателя в виде приведенных к заданному номинальному напряжению зависимостей тягового усилия тока и косинуса фазового сдвига от скольжения и ускорения, причем при определении тягового усилия из величины тягового усилия вычитают составляющую силы тяжести подвижной части, совпадающую с направлением ее движения.
2. Способ по п.1,отличающийся тем, что, с целью повышения точности за счет исключения влияния силы электромагнитного трения, измеряют силу соп ротивления перемещению подвижной части с постоянной скоростью, не превышающей 5% разности синхронной и критической скоростей двигателя, при различных значениях постоянного тока,, воздействующего на две фазные обмотки, соединенные концами, а при опреде- лении характеристик величину измеренной силы сопротивления прибавляют к вычислительным значениям тягового усилия, причем для определения этой силы в каждой точке характеристики используют ее зави- симость от намагничивающего тока, величину которого juvt: в данной точке определяют из выражения
I/WE X
+(
УГ. Rr UH
„ lw RP, -2--т-:- -cos pve. .
UH
где
+(
-COS po
Rp - расчетное активное сопротивление фазы обмотки. Ом:40
ve - действующее значение фазного тока при скольжении Sv и ускорении АЈ , А;
UH - номинальное напряжение статора, В;
cos PVF.. коэффициент мощности при скольжении Si и ускорении Af; ;
to - действующее значение фазного тока в точке характеристики, соответствующей движению подвижной части двигателя
С СИНХРОННОЙ СКОРОСТЬЮ. A.gQ
5 10
15 0 5
0
.
5
0
Q
cos /ъ - коэффициент мощности при движении подвижной части двигателя с синхронной скоростью.
4. Устройство для определения характеристик линейных асинхронных двигателей, содержащее упругие элементы, измерительный блок с каналами измерения скорости и усилия и регистратор, отличающееся тем, что. с целью повышения точности определения статической характеристики и расширения возможности определения динамических характеристик, в него дополнительно введены регулируемый источник постоянного тока, стабилизированный привод равномерного перемещения подвижной части линейного двигателя, измеритель активного сопротивления, силовой блок периодических включений, трех- и двухполюсный двухпозиционные переключатели, в измерительный блок введены каналы измерения напряжения, тока и угла фазового сдвига между ними, регистратор выполнен в виде цифрового запоминающего блока, соединенного с вычислительным блоком, а упругие элементы выполнены съемными с возможностью наложения упругой связи подвижной части испытуемого линейного двигателя с его статором на всем протяжении ее хода и полного исключения указанной упругой связи, причем подвижные контакты трехполюсного переключателя соединены с соответствующими фазами трехфазной сети, размыкающие контакты трехполюсного переключателя соединены с входами силового блока периодических включений, а замыкающие - с входами регулируемого источника постоянного тока, выходы которого соединены с размыкающими контактами двухполюсного переключателя, размыкающие контакты которого соединены с входами измерителя активного сопротивления, а подвижные контакты - с первым и вторым выходами силового блока периодических включений и с первой и второй клеммами для подключения обмотки статора линейного двигателя, а третья клемма для подключения обмотки статора соединена с третьим выходом силового блока периодических включений.
Фи Г, 4


| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для жидкостной обработки текстильных материалов | 1990 |
|
SU1824468A1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Способ управления @ -фазным преобразователем с непосредственной связью | 1986 |
|
SU1398051A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от обрыва фазы | 1982 |
|
SU1101961A1 |
| Устройство для косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1275337A1 |
| Ротор с индукционным сопротивлением для многоскоростного асинхронного двигателя | 1982 |
|
SU1026247A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |
| Электропривод переменного тока | 1987 |
|
SU1501242A2 |
| Способ изменения числа полюсов электродвигателя | 1980 |
|
SU974538A1 |
| Устройство для косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1985 |
|
SU1308957A1 |


Изобретение относится к электротехнике и может быть использовано при автоматизированных испытаниях линейных асинхронных двигателей (ЛАД), в том числе ЛАД со вторичг- ным элементом ограниченной длины. Цель изобретения - повышение точности определения статической характеристики и расширение возможности определения динамических характеристик Испытуемый двигатель устанавливают вертикально и проводят серию опытов, изменяя подведенное к двигателю напряжение и присоединенную к подвижной части добавочную массу. После получения в каждомопыте зависимостей от времени усилия, тока, коэффициента мощности, скольжения и ускорения устанавливают их взаимные зависимости и затем путем совместной обработки их из всей серии опытов определяют статическую и динамические характеристики, 2 з.п.ф-лы. 4 ил. ел с

| Авторское свидетельство СССР N 1514095 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электротехническая промышленность | |||
| .Серия: Электрические машины, 1983, вып.З | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| -. | |||
| ;. | |||
| /;:.,-.: : - , Авторское свидетельство СССР № 954905, кл.6 01 R 31/34, 1981. | |||
