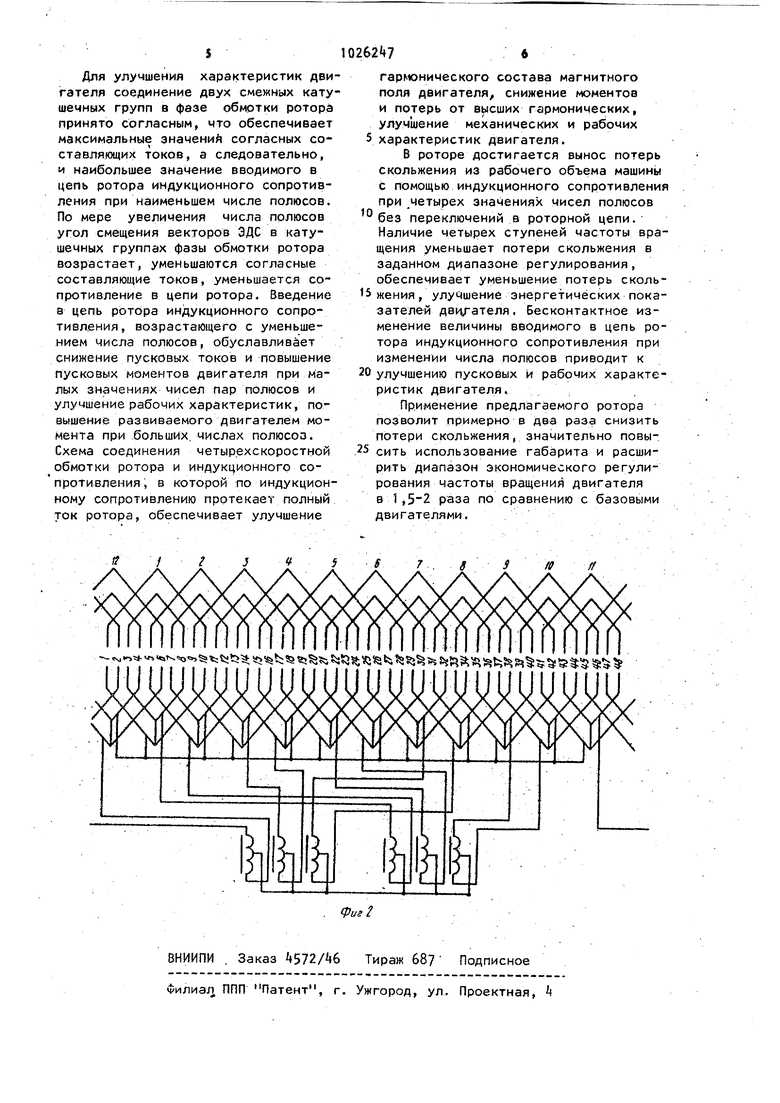
Изобретение относится к регулиру мым электродвигателям переменного тока с индукционным сопрбтивлением в цепи ротора. Известен ротор с постоянно вклюценным индукционным сопротивлением, предназначенный для двухскоростных трехфазных асинхронных двигателей, регулируемых изменением величины приложенного к обмотке статора напряженияи числа пар полюсов . Параметры ротора зависят от.числа пар полюсов двигателя, что обеспечивает улучшение характеристик ма ны. Однако область применения ротора ограничена двухскоростными электродвигателями. Известен ротор с индукционным со противлением, предназначенный .для трехскоростного асинхронного регули электродвигателя с отношением чисел полюсов 2:3: Трехфазна обмотка которого состоит из 12 одинаковых катушечных групп, соединенн в две трехфазные звезды с двумя параллельными ветвями, в которых смещ ние векторов ЭДС при р 2 и р И равно 120,а при р 3-180 эл.град. Поскольку каждая звезда обмотки ротора соединена с отдельным трехфаз ным индукционным сопротивлением, то в этом сопротивлении определяется встречными составляющими ЭДС в парал лельных ветвях обмотки ротора, что при указанном смещении векторов 9flC несколько ухудшает характеристики двигателя при больших значениях чи сел пар полюсов. Кроме того, област его применения ограничена трехскоростными двигателями с отношением чисел полюсов 2:3:. Известен ротор трехскоростного асинхронного двигателя с отнс шением чисел полюсоа i:2: А, трехфазная обмотка которого состоит из 12 одинако вых катушечных групп, соединенных в две отдельные звезды с двумя параллельными ветвями в каждой фазе звезды, образованными двумя сме1жными и вкЛюченнь1МИ встречно катушечными группами 3 .С каждой трехфазной звездой обмотки ротора соединено отдельное трехфазное индукционное сопротивление , токи в котором определяются встречными составляющими ЭДС в смежных катушечных группах, возрастающими с уменьшением числа пар полюсов. Это обеспечивает зависимость параметров ротора от числа пар полюсов и улучшает пусковые характеристики двигателя. Однако ротор имеет ограниченную область применения, определяемую отношением чисел полюсов 1:2:, а также характе| изуется некоторым ухудшением механических характеристик, связанным с тем, что индукционное сопротивление влияет только на встречные составляющие ЭДС в параллельных ветвях фаз обмотки. Наиболее близким к предлагаемому по технической сущности является ротор многоскоростного асинхронного двигателя с отношением чисел полюсов 1:2:3:А согласно. Обмотка ротора состоит из 12 одинаковых катушечных групп, соединенных в две отдельные трехфазные звезды с общей нулевой точкой и с двумя параллельными ветвями в каждой фазе звезды| образованными двумя смежными и включенными встречно катушечными группами с порядковыми номерами в одкой звезде 1-2, 5-6, 9-10 и 3-, 7-8, М-12 в другой звезде. В параллельных катушечных группах каждой фазы звезды обмотки ротора обеспечивается смещение векторов индуктируемых в них ЭДС при 2р 8 на 60, при 2р 6 на 90, при 2р 4 на 120 и при 2р 2 на 150 эл.град. Индукционное сопротивление состоит из 6 катушек с массивными ферромагнитными сердечниками, соединенных в две звезды.с общей нулевой точкой. Каждая звезда индукционного сопротивления соединена со звездой обмотки ротора, а токи в индукционном сопротивлении определяются значениями встречных составляющих ЭДС в параллельных ветвях фазы обмотЛи. При указанном угловом смещении | векторов ЭДС это обеспечивает улучще- Ние пусковых характеристик двигателя, повышение развиваемой двигателем мощности при больших значениях чисел полюсов L4J. Недостатком poTojia является то, что по индукционному сопротивлению протекают только встречные составляющие токов параллельных ветвей фазы обмотки ротора. Согласные составляющие токов этих ветвей протекают только по обмотке ротора, минуя индукционное сопротивление. Воздействие индукционного сопротивления только на встречную соогавляющую токов в . параллельных ветвях обмотки и изменение величины этой составляющей тока 310 приводит к некоторому искажению магнитного поля двигателя, появлению высших гармоник поля, обуславливающих ухудшение механических характеристик образованием в них провалов, увеличение потерь двигателя. Проявление высших гармоник тем сильнее, чем боль шее значение электрического сопротивления включается в-цепь ротора. Цель изобретения - улучшение механических и рабочих характеристик многоскоростного двигателя с индукционным сопротивлением в цепи фазного ротора. Указанная цель достигается тем, что в роторе, содержащем магнитопровод с размещенной на нем обамоткой, состоящей из двенадцати одинаковых катушечных групп, соединенных в две з.везды с общей нулевой точкой и с двумя смежными параллельно включенными .катушечными группами, две смежные параллельные катушечные группы в каждой фазе обеих звезд обмотки ротора соединены между собой согласно и подключены к началу и ко.нцу катушки индукционного сопротивления а средние точки всех катушек индукционного сопротивления соединены между собой. На фиг. 1 представлена схема сое динения элементов обмотки ротора (РР и индукционного сопротивления (ИС) для отношения чисел пар полюсов 1:2:3: ; на фиг. 2 - развернутая схе ма соединения обмотки ротора и индук ционного с опротивления многоскорост ного асинхронного двигателя с числами полюсов 2, ,6,8 для 2. kB. Трехфазная многрскоростная обмотка ротора с отношением чисел пар полюсов 1:2:3: состоит из 12 одинако. вых катушечных групп, равномерно ipac пределенных по окружности ротора. Катушечные группы соединены в две звезды с общей нулевой -точкой и с двумя смежными параллельно включен-, ными катушечными группами в каждой фазе збезды. Порядковые номера кат-/шечных групп первой звеЗды 1-2, 5-6, 9-10, а второй звезды - 3, 7-8, 11-12. Катушечные группы в параллель ных ветйях каждой фазы обеих звезд обмотки включены между собой (фиг.2) Распределение катушечных групп по фазным зонам для чисел полюсов 8, 6, Л и 2 осуществляется следующим .способом : 7 катушечных1 -2-3- -5-6-7-8-9-10-11-12 А-В-С-А-В-С-А-В-С-А-В-С А-В-Х-У-А-В-Х-У-А-В-Х-У А- -В-Х-С-У-А- -В-Х-С-У А-А- - -В-В-Х-Х-С-С-У-У Из этого распределения следует, что угол между осями смежных катушеч ных групп обмотки, а следовательно, и угол смещения..векторов ЭДС в этих катушечных группах при их согласном включении в фазах при 2р 8 равен 120, при 2р 6 - 90 при 2р i 60 и при 2р 2 - 30 эл.град. ; Индукционное сопротивление выполнено из шести катушек с массивными ферромагнитными сердечниками и с выводами из средних точек катушек. Начала и концы катушек индукционного . сопротивления соединены с выводами двух смежных катушечных групп фазы , обмотки ротора, а выводы из средних точек катушек индукционного сопротивления соединены между собой (фиг. 1).: Включение катушки индукционного сопротивления между двумя смежными : .катушечными группами обмотки ротора i обеспечивает протекание- всего тока ротора по индукционному сопротивлению, т.е. по этому сопротивлению протекают как встречные, так и согласные составляющие токов в парал лельных ветвях фазы обмотки ротора, обусловленные смещение векторов ЗДС в смежных катушечных группах этих ветвей. Электрическая цепь для --: встречных составляющих токов обеспе.чивается соединением между собой нулевых точек обеих звезд обмотки ротора и выводов из ср,едних точек катушек индукционного сопротивления. Согласные составляющие Токов, протекающие по катушкам индукционного сопротивления, создают ампервитки ндмагничивания и определяют величину индукционного сопротивления, вводимо ГО в цепь ротора. Встречные составляющие токов не создают ампервитков намагничивания, поскольку они взаимно компенсируются, т.е. катушка индукционного сопротивления является для Их бифилляром. Таким образом, в роторе значение индукционного сопротивления возрастает при увеличении согласных составляющих токов.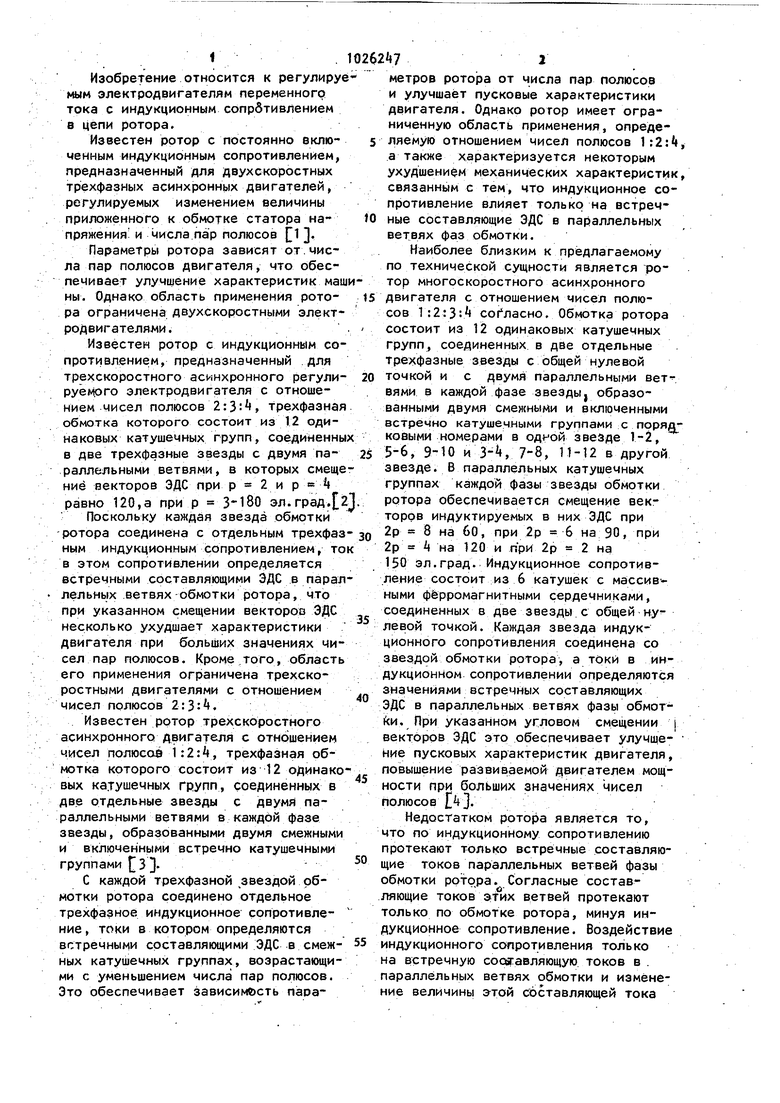
РОТОР С ИНДУКЦИОННЫМ СОПРОТИВЛЕНИЕМ ДЛЯ МНОГОСКОРОСТНОГО АСИНХРОННОГО ДВИГАТЕЛЯ, содержащий магнитопровод с размещенной на нем обмоткой, состоящей из двенадцати одинаковых катушечных групп, соединенных в две звезды с общей нулевой точкой и с двумя смежными параллельно включенными катушечными группами в каждой фазе звезды, порядковые номера которых в первой звезде 1-2, 5-6 , а во второй звезде - , 7-8 П-12, и индукционное сопротивление, состоящее из шести катушек с массивными ферромагнитными сердечниками, соединенных с обмоткой ротора, отличающийся тем, что, с целью улучшения механических и рабочих характеристик двигателя, две смежные параллельные катушечные группы в каждой фазе обеих звезд обмотки ротора соединены между собой согласно и под(Л ключены к началу и концу катушки индукционного сопротивления, а средние с точки всех катушек индукционного сопротивления соединены между собой. о N0 о N0 4iii