. Изобретение касается текстильной машины, оснащенной рядом мотальных рычагов для катушек с пряжей, вдоль которых установлены ленточный транспортер и подвижное автоматическое устройство для съема наработанных паковок с мотальных рычагов и их передачи на транспортер, соединенный с контрольным устройством и устройством управления.
Целью изобретения является повышение надежности в работе.
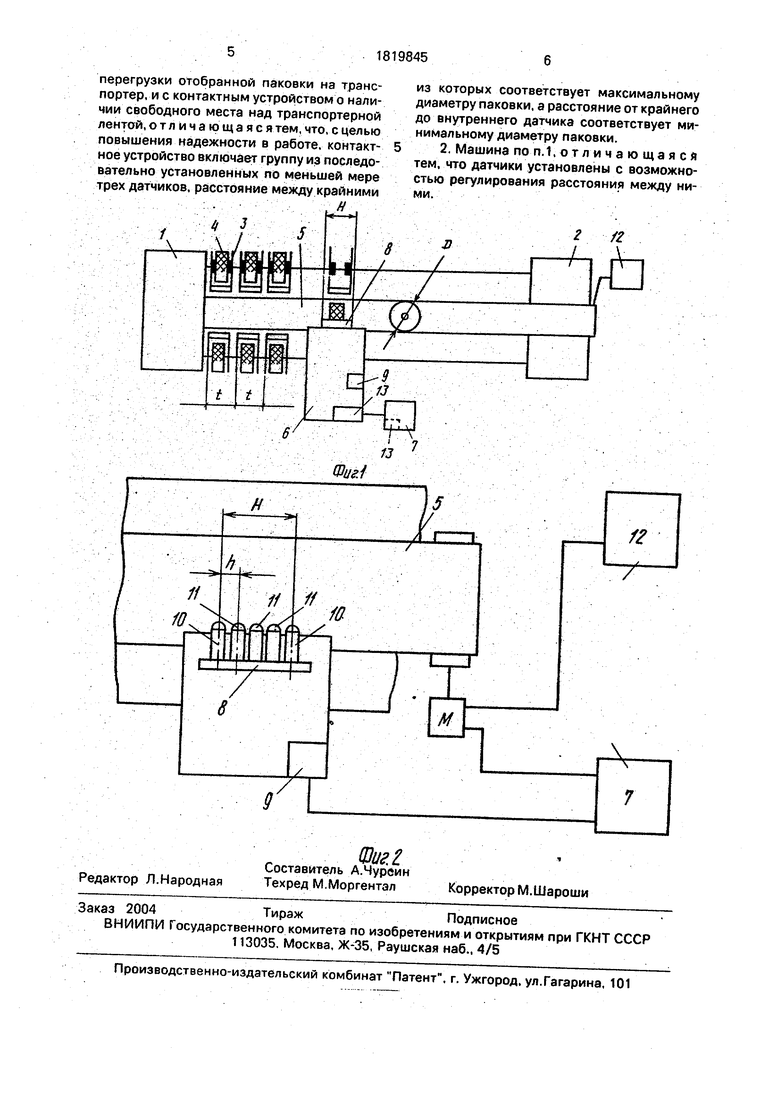
На фиг. изображена общая схема машины сверху; на фиг.2 - вид сверху на вариант исполнения датчика на автосьемнике.
Текстильная машина, например безветг ренная прядильная машина, состоит из боковых шкафов 1 и 2. установленных по обо им концам машины, внутренних секдий и рядов друг за другом размещенных мотальных рычагов 3 катушек 4 для наматывания пряжи. Вдоль обоих рядов мотальных рычагов 3 внутри машины установлен ленточный транспортер 5, на который укладываются наработанные паковки. На машине на соответствующих направляющих шинах установлен автосъемник 6 известного исполнения, оснащенный автоматическим контрольным устройством 7 управления или соединенный с этим устройством, установленным в одном бокрвом шкафу 1 или 2. в которых помещены, например, механизмы привода, устройства управления для всей машины.
00
лО IOO
СП
На фиг. 1 изображено устройство 7 контроля и управления. Автосъемник 6 на стороне транспортера 5. оснащен пространственным датчиком 8 для поиска свободного места над ленточным транспортером 5. Данный пространственный датчик 8 соединен с устройством управления 7, которое посредством контрольной цепи управляет работой а втосъемн и ка 6. АвтосъемниК 6 оснащен блокирующим устройством 9 или электрической цепью блокирования/ Кбтррйя блокирует съем следующей паковки 4 до тех пор, пока авто- съемник & не выполнит передачу снятой ria- ковкина транспрртер из--за его полного заполнения; Только после передачи паковки на транспортер 5 автосъемник может провести дальнейший съем паковки, Про- странствейный; датчик 8 может быть выполнен различно, например, в виде мик- рОперетслючателя с контактным рычажком или в виде фотоэлектрического датчика, В Определенном случае является преимущественнымисполнение датчика 8 фотоэлектрическим, крторый позволяет создать два и несколько каналов 10 и. Н для съема: ГИрж- но напримёр.снйматьширйну И пространства над транспортером 5. равную расстоянию прядильных мест или других рабочих устройств, или ширину Н пространстваопределять в зависимости от ширины пространства, необходимого для укладки паковки ее Диаметром D Например, если паковка у ладывается;П9пер;ёчно своим диаметром 5Э, потом ширина Н снимаемого простру нетва равна мйнима л ьному диаметруР нараббтэннрй паковки А. Равным образом предпочтительно, если датчик 8 имеет между крайними каналами 10 ещё внутренние каналы 11 съема, образующие три датчика, которые друг от друга размещены на расстоянии от максимального до минимального диаметра Р снимаемых паковок 4. Вследствие этого контролируется диаметр снимаемых, в том числе недоработанных паковок. Является предпочтительным; если каналы 10 и 11 съема в пространственном датчике 8 установлены с возможностью регулирования расстояния и разборно. В таком случае можно привести в соответствие диаметр наработанных паковок и пространство для их укладки на транспортере. Транспортер 5 в данном случае действует как накопитель паковок 4 и только после его заполнения приводится в действие обслуживающим персоналом.,
Предпочтительно также, когда ленточный транспортер 5 соединен с самостоятельным устройством управления 12. Далее существенно, если автосъемник 6 или устройство управления 7 оснащены устройством сигнализации 13 заполнения транспортера 5. Машину также можно оснастить известным автоматическим устройством для укладки паковок, которое размещено в конце машины у бокового шкафа.
Работа машины осуществляется следующим образом.
Автрсъемник 6 подходит к рабочему месту известным образом. Съем паковки 4 и ее укладка на транспортер 5 управляется устройством управления 7 только, если, датчик 8 не имеет сигнала заполнения транспортера, т.е. если на транспортере есть свободное место. Если нет свободного места, замена паковки 4 не производится и авто- съёмник 6 переезжает к другому прядильному месту или снимет паковку 4 с рычага 3
машины, оставит ее у себя и положит ее на транспортер тогда, когда при объезде машины найдет Свободное место на транспортере. В результате этого не происходит наложения паковок на транспортере.
Изобретение обеспечивает и другие возможные процессы, когда устройство управления 7 автосъемником 6 соединится с приводом транспортера 5, транспортер переместится на один или несколько шагов в
одну или в другую сторону так, что напротив места обсл кивания располагается свободная часть транспортера.
Примерное исполнение изобретения изображено для транспортера, который являетея составной частью машины, Транспортер также можно навесить над машиной. Транспортер в этом случае не должен быть ленточный, а выполняется в виде подвески
.с крюками.
Следующим преимуществом исполнения изобретения является то, что можно снимать паковки на неподвижный транспортер, а паковки с него удалять, когдаудоб- но тю мере надобности, т.к. транспортер
создает большой запас паковок. Последующие операции удаления паковок удобно автоматизировать.
50
Ф о рм у л а и з о б р е т е н и я
1. Текстильная машина, содержащая два ряда мотальных рычагов для паковок, размещенный между ними ленточный транспортер и автосъемник наработанных 5 паковок, установленный с возможностью перемещения от одного рабочего места к другому и снабженный средством перегрузки паковки на транспортер и контрольным и управляющим устройствами со средством блокировки съема паковки, при отсутствии
перегрузки отобранной паковки на транспортер, и с контактным устройством о наличии свободного места над транспортерной лентой, отличающаяс я тем, что, с целью повышения надежности в работе, контактное устройство включает группу из последовательно установленных по меньшей мере трех датчиков, расстояние между крайними
Н
,-.:,,,
из которых соответствует максимальному диаметру паковки, а расстояние от крайнего до внутреннего датчика соответствует минимальному диаметру паковки.
2. Машина по п.1, от л и ч а ю щая с я тем, что датчики установлены с возможностью регулирования расстояния между ними.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема текстильных паковок | 1987 |
|
SU1460013A1 |
| Устройство для снятия наработанных паковок и установки пустых сердечников на мотальной машине | 1985 |
|
SU1305119A1 |
| Мотальная машина | 1980 |
|
SU1030288A1 |
| Устройство для съема паковок на текстильной машине | 1990 |
|
SU1776704A1 |
| Способ перезаправки мотального механизма и устройство для его осуществления | 1985 |
|
SU1418240A1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВАНИЯ ПАКОВОК, | 1964 |
|
SU165394A1 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1988 |
|
SU1671747A1 |
| Способ замены паковок на текстильной машине | 1987 |
|
SU1437335A1 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1990 |
|
SU1784674A1 |
| АВТОМАТ ДЛЯ ПРЯДЕНИЯ И ПЕРЕМАТЫВАНИЯ ПРЯЖИ | 1991 |
|
RU2009281C1 |
Изобретение относится к текстильной промышленности и используется для укладки снятых наработанных паковок на ленточный транспортер в случае, когда место на ленточном транспортере напротив снятой паковки уже занято ранее снятой паковкой. Для этого автосьемник оснащен на стороне ленточного транспортера пространственным датчиком для определения свободного места над ленточным транспортером. Датчик соединен с устройством управления, оснащенным блокирующим устройством против съема дальнейшей паковки, пока она не была передана на ленточный транспортер. Устройство выполняется многоканальным, например, -в виде трех датчиков, расстояние между крайними из которых со- ответ.ствует максимальному диаметру паковки, а расстояние от крайнего внутреннего датчика соответствует минимальному диаметру паковки. Расстояние между датчиками может регулироваться. 1 з.п. ф-лы. 2 ил. у Ё
