Изобретение относится к измерениям, в частности к устройствам для определения центра масс объекта, и может быть использовано в условиях невесомости.
Целью изобретения является повышение точности и расширение эксплуатационных возможностей.
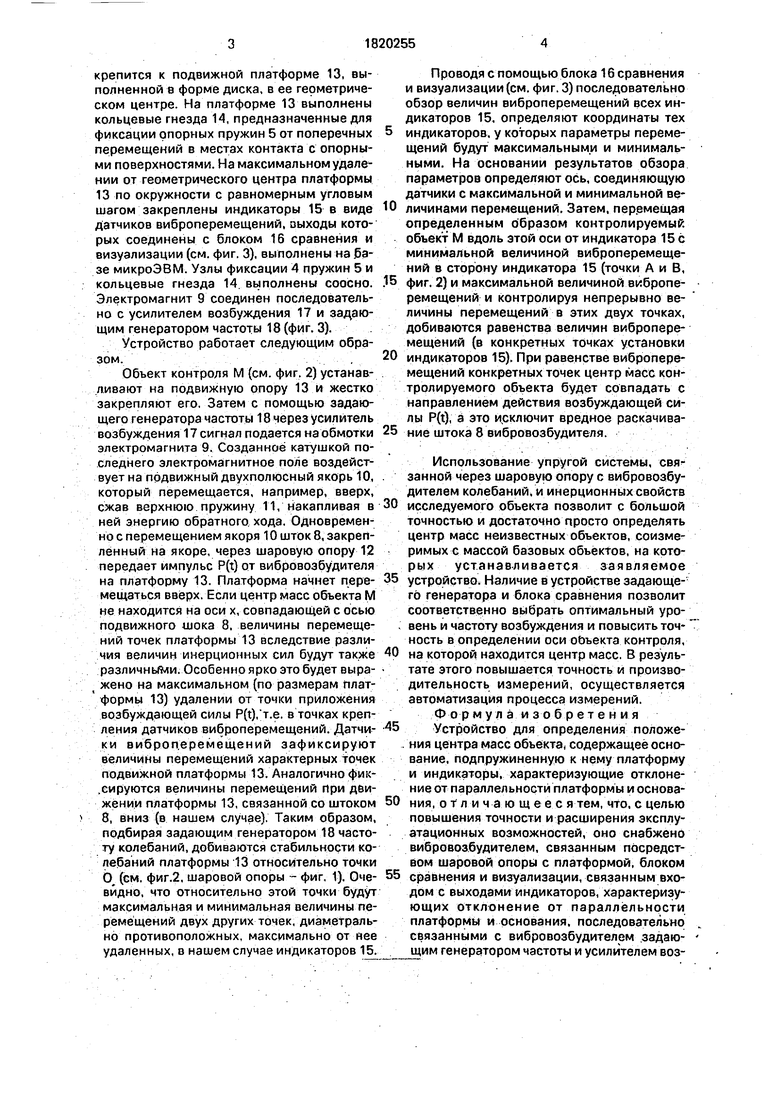
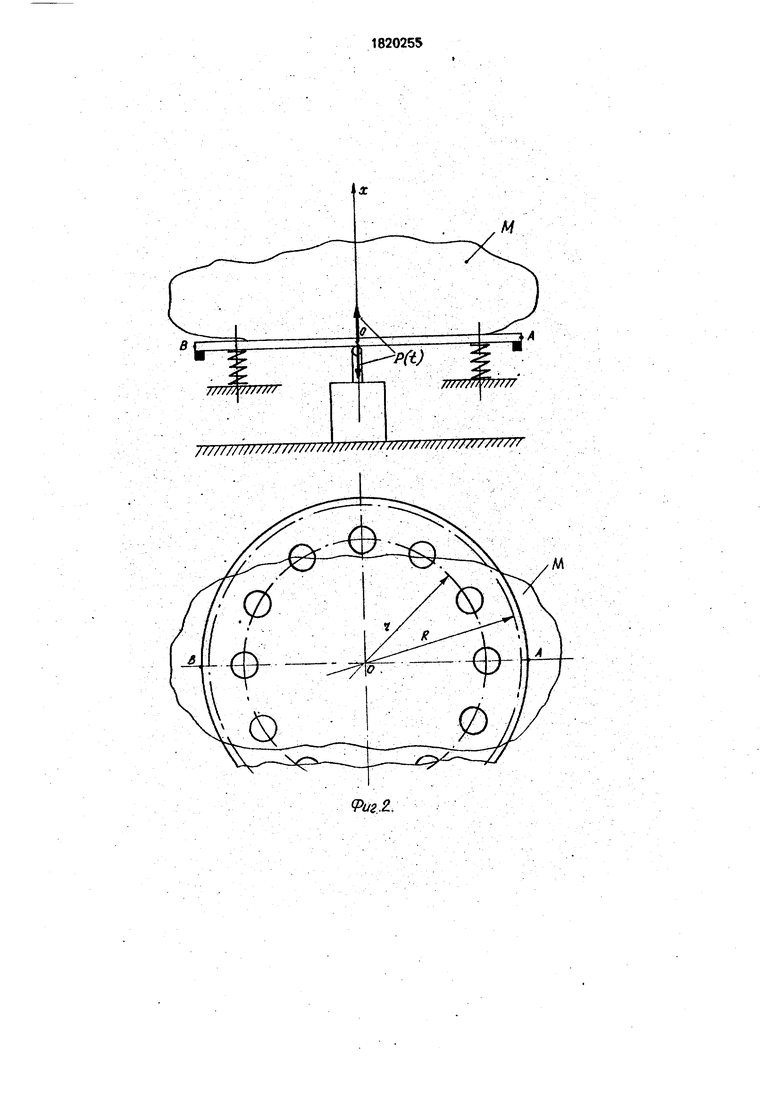
На фиг, 1 показано предлагаемое устройство, поперечный разрез, в двух проекциях; на фиг. 2 - принципиальная схема устройства; на фиг. 3- блок-схема устройства для определения положения центра масс объекта....
Устройство содержит корпус 1 с площадкой 2 и ребрами жесткости 3. На площадке 2 выполнены узлы фиксации 4 опорных пружин 5 и кольцевая отбортовка 6, в которой запрессована фторопластовая втулка 7. Кольцевые отбортовки 6 с втулками
7 соосно образуют направляющие для штока 8 вйбровозбудителя. Поверхность штока
8 выполнена полированной и образует совместно с фторопластовой втулкой 7 трущуюся пару в виде подшипника скольжения с минимальным коэффициентом трения. Вибровозбудитель выполнен в виде электромагнита 9 с подвижным двухполюсным якорем 10. Якорь 10 опирается с двух сторон на пружины 11. Подвижный якорь 10 через шток 8 соединен с шаровой опорой 12. Шаровая опора 12
00
ю о ю ел ел
крепится к подвижной платформе 13, выполненной в форме диска, в ее геометрическом центре. На платформе 13 выполнены кольцевые гнезда 14, предназначенные для фиксации опорных пружин 5 от поперечных перемещений в местах контакта с опорными поверхностями. На максимальном удалении от геометрического центра платформы 13 по окружности с равномерным угловым шагом закреплены индикаторы 15 в виде датчиков виброперемещений, выходы которых соединены с блоком 16 сравнения и визуализации (см. фиг. 3), выполнены на базе микроЭВМ. Узлы фиксации 4 пружин 5 и кольцевые гнезда 14. выполнены соосно. Электромагнит 9 соединен последовательно с усилителем возбуждения 17 и задающим генератором частоты 18 (фиг. 3).
Устройство работает следующим образом..
Объект контроля М (см. фиг. 2) устанавливают на подвижную опору 13 и жестко закрепляют его. Затем с помощью задающего генератора частоты 18 через усилитель возбуждения 17 сигнал подается на обмотки электромагнита 9. Созданное катушкой последнего электромагнитное поле воздействует на подвижный двухполюсный якорь 10, который перемещается, например, вверх, сжав верхнюю пружину 11, накапливая в ней энергию обратного, хода. Одновременно с перемещением якоря 10 шток 8, закреплённый на якоре, через шаровую опору 12 передает импульс P(t) от вибровозбудителя на платформу 13. Платформа начнет перемещаться вверх. Если центр масс объекта М не находится на оси х, совпадающей с осью подвижного шока 8. величины перемещений точек платформы 13 вследствие различия величин инерционных сил будут также различными. Особенно ярко это будет выражено на максимальном (по размерам плат- формы 13) удалении от точки приложения возбуждающей силы Р(т,), т.е. в точках крепления датчиков виброперемещений. Датчики виброп.еремещений зафиксируют величины перемещений характерных точек подвижной платформы 13. Аналогично фик- .еируются величины перемещений при движении платформы 13, связанной со штоком 8, вниз (в нашем случае). Таким образом, подбирая задающим генератором 18 частоту колебаний, добиваются стабильности колебаний платформы 13 относительно точки О (см. фиг.2, шаровой опоры - фиг. 1). Очевидно, что относительно этой точки будут максимальная и минимальная величины перемещений двух других точек, диаметрально противоположных, максимально от нее удаленных, в нашем случае индикаторов 15.
Проводя с помощью блока 16 сравнения и визуализации (см. фиг. 3) последовательно обзор величин виброперемещений всех индикаторов 15, определяют координаты тех
индикаторов, у которых параметры перемещений будут максимальными и минимальными. На основании результатов обзора параметров определяют ось, соединяющую датчики с максимальной и минимальной величинами перемещений. Затем, перемещая определенным образом контролируемый объект М вдоль этой оси от индикатора 15с минимальной величиной виброперемещений в сторону индикатора 15 (точки А и В,
фиг. 2) и максимальной величиной виброперемещений и контролируя непрерывно величины перемещений в этих двух точках, добиваются равенства величин виброперемещений (в конкретных точках установки
индикаторов 15). При равенстве виброперемещений конкретных точек центр масс контролируемого объекта будет совпадать с направлением действия возбуждающей силы P(t), а это исключит вредное раскачивание штока 8 вибровозбудителя.
Использование упругой системы, занной через шаровую опору с вибровозбудителем колебаний, и инерционных свойств
исследуемого объекта позволит с большой точностью и достаточно просто определять центр масс неизвестных объектов, соизмеримых с массой базовых объектов, на которых устанавливается заявляемое
устройство. Наличие в устройстве задающего генератора и блока сравнения позволит соответственно выбрать оптимальный уро- , вень и частоту возбуждения и повысить точность в определении оси объекта контроля,
на которой находится центр масс. В результате этого повышается точность и производительность измерений, осуществляется автоматизация процесса измерений. Формул а изо бретени я
Устройство для определения положе- . ния центра масс объекта, содержащее основание, подпружиненную к нему платформу и индикаторы, характеризующие отклонение от параллельности платформы и основания, о f л и чаю щ е е с я тем, что. с целью повышения точности и расширения эксплуатационных возможностей, оно снабжено вибровозбудителем, связанным посредством шаровой опоры с платформой, блоком
сравнения и визуализации, связанным входом с выходами индикаторов, характеризующих отклонение от параллельности платформы и основания, последовательно связанными с вибровозбудителем .задающим генератором частоты и усилителем воз51820255 6
буждения, платформа выполнена в виде ди-основания, - в виде датчиков виброперемещеска, а индикаторы, характеризующие откло-ний и установлены жестко на платформе по
нение от параллельности платформы иокружности с равномерным угловым шагом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ВИБРАЦИИ ИССЛЕДУЕМОМУ ОБЪЕКТУ | 1991 |
|
RU2030927C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| Двухкоординатный вибростенд | 1988 |
|
SU1629771A1 |
| ОПОРА С АКТИВНОЙ ВИБРОИЗОЛЯЦИЕЙ | 2004 |
|
RU2268421C1 |
| Вибростенд одноосевой гидравлический | 2018 |
|
RU2715348C1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| ВИБРОСТЕНД | 1996 |
|
RU2118806C1 |
| Трансформаторный датчик отклонения для весов с электромагнитным уравновешиванием | 1982 |
|
SU1040342A1 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВОСПРОИЗВОДИМОЙ ДОЗИРОВАННОЙ КОНТУЗИОННОЙ ТРАВМЫ СПИННОГО МОЗГА У КРЫС | 2021 |
|
RU2755234C1 |

Использование, для определения центра масс объекта в земных условиях и условиях невесомости. Сущность: устройство срдержит корпус с площадкой и ребрами жесткости. На площадке выполнены узлы фиксации опорных пружин и кольцевая от- бортовка. в которой запрессована фтороп- ластовая втулка. Кольцевые отбортовки с втулками соосно образуют направляющие для штока вйбровозбудителя, выполненного в виде электромагнита с подвижным двухполюсным якорем. Якорь опирается с двух сторон на пружины. Подвижный якорь через шток соединен с шаровой опорой. Последняя крепится к подвижной платформе, выполненной в форме диска, в ее геометрическом центре. На платформе выполнены кольцевые гнезда, предназначенные для фиксации опорных пружин от поперечных перемещений в местах контакта с опорными поверхностями. На максимальном удалении от геометрического центра платформы по окружности с равномерным шагом закреплены датчики виброперемещений, выходы которых соединены с блоком сравнения, выполненным на базе микроЭВМ. Узлы фиксации пружин и кольцевые гнезда выполнены соосно. Электромагнит соединен последовательно с усилителем возбуждения и задающим генератором частоты. 3 ил. ч fe
(S /j 8
Риг: 1.
W
У/У//Х/////////////////////УУ/////////////У////////////
w
«920281
перемещение о$ьект
-М
15
9 8и5оо8оз§удитель
18
Фиг. 5.
| Устройство для определения координат центра масс изделий | 1986 |
|
SU1350511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения координат центра масс изделия | 1985 |
|
SU1355879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
