Изобретение относится к фотосъемке и может быть использовано в фотографиче- сйих системах, устанавливаемых на летательных аппаратах (ЛА)..
.Известен способ компенсации сдвига изображения, заключающийся в перемещении объектива в направлении, обратном полету ЛА, со скоростью, равной скорости движения изображения.
Наиболее близким по технической сущности к данному техническому решению является способ компенсации сдвига изображения, заключающийся в том, что уменьшают скорость изображения относительно фотопленки протяжкой ее с компенсационной скоростью, а линейные скорости изображения, обусловленные вращениями фотоаппарата, сводят до допустимых значений уменьшениV arctg(Wy/Wx)
0)
ем угловых скоростей (стабилизацией) фо- тоаппарата. При этом поперечную скорость, у обусловленную поступательными переме- щёкиями фотоаппарата, сводят до допустимых значений, выбирая углы рыскания ЛА по формуле
10 О
СА СП 00
где Wx. Wy - продольная и поперечная составляющие линейной скорости ЛА.
Недостаток способа-прототипа состоит в невысокой точности компенсации сдвига .изображения из-за того, что не учитывается влияние на продольную и поперечную составляющие сдвига изображения величины угла тангажа Л А и изменения скорости земной поверхности в точке съемки.
Целью изобретения является повышение качества изображения путем повышения точности компенсации сдвига изображения,
Поставленная цель достигается тем, что при формировании изображения при фотографировании с летательного аппарата производят разворот летательного аппарата на углы тангажа а и рыскания 1р, производят стабилизацию летательного аппарата, определение угловых скоростей по осям тангажа, крена и рыскания и угла крена летательного аппарата и при равенстве этих значений нулю экспонирование фотопленки, перемещаемой со скоростью v, определяют эксцентриситет е, наклонение I, фокальный параметр Р орбиты летательного аппарата и аргумент перигея со летательного аппарата и определяют угловую скорость восходящего узла орбиты ЛА в зависимости.
Q е (1-е2)3/2со81(иР7) 1/2 (2)
где: QJ-угловая скорость вращения Земли;
е - параметр, характеризующий сжатие Земли;
ц- геоцентрическая гравитационная постоянная Земли,
затем измеряют текущие значения угла тангажа аргумента широты и и определяют угловую скорость ЛА из следующей зависимости:
ц vjw/P CI+lcos v)2
где о) - истинная аномалия Л А.
и угол рыскания из следующей зависимости;
у arctg(Po/Q),
ч .
где Ро (cos a-bo)+b2Sin Q(u+ QbcosiXbo-cosa-1); I cos u; I sin u;
(Ci- VC1 - CoCa);
Ј22Ьз2;
Ci cosa+ Ј22Ьз:
+ Ј22b22-{(ao+h)(1+ecos v)/pf;
b3 b2cos ct-bisln a,
0
к 2,ao - второй эксцентриситет и большая полуось земного эллипсоида соответственно;.
h - среднее превышение района съемки на уровенной поверхностью, после чего последовательно разворачивают ЛА по углу рыскания на угол rj), стабилизируют ЛА, измеряют текущее значение угла рыскания и определяют компенсационную скорость движения фотопленки из следующей зависимости:
a cos V;+Qb(cosicosfl: cosV |5 bisin $)-u cos y. i cos i/ - sin VKbicos a+b2sln a)}.
0
5
0
5
0
5
0
5
где f - фокусное расстояние обьектива фотоаппарата.
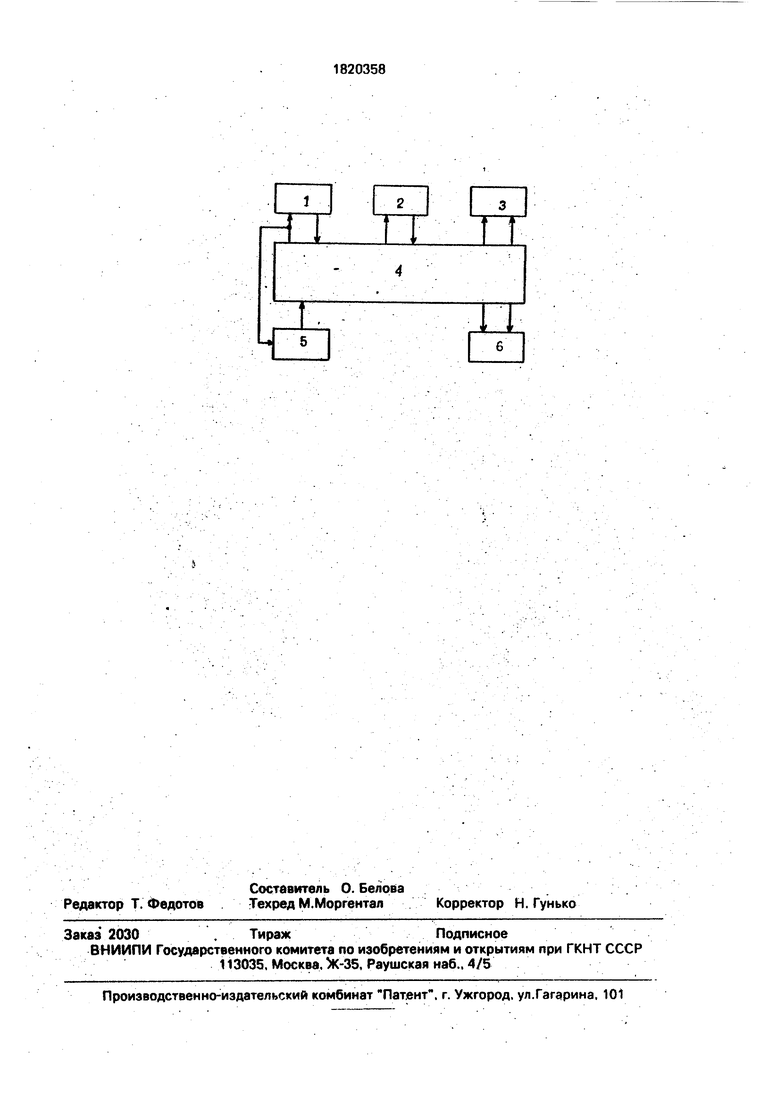
На чертеже приведена структурная схема устройства, позволяющего реализовать предложенный способ.
Устройство, реализующее способ, содержит датчик 1 аргумента широты, датчик 2 угла рыскания, систему 3 ориентации и стабилизации (СОС) ЛА, систему 4 вычисления компенсационной скорости ЛА; датчик 5 угла тангажа; фотоаппарат 6.
В исходном состоянии в системе 4 вычисления компенсационной скорости движения фотопленки записана программа работы, исходные данные: значения Ј2, ао, h, Оз, е , Р, е, i, ш, Г, а также алгоритмы расчета угла ty и скорости v. Отрабатывая программу работы, в определенный момент времени со своего второго выхода система подает требуемое значение угла тангажа а на второй вход системы 3 ориентации и стабилизации, которая поворачивает ЛА на угол а по тангажу и затем стабилизирует его. В очередной момент времени с пятого выхода системы 4 вычисления компенсаци- онной скорости движения импульс поступает на управляющие входы датчиков аргумента широты 1 и угла тангажа 5. Благодаря этому текущее значение аргумента широты u с выхода датчика 1 поступает на первый вход системы 4 вычисления компенсационной скорости движения фотопленки. Текущее значение угла тангажа ас выхода датчика 5 поступает на третий вход системы 4 вычисления компенсационной скорости движения фотопленки, которая рассчитывает величину угла рыскания i/v которая с первого выхода системы 4 вычисления компенсационной скорости движения фотопленки поступает на первый вход системы 3 ориентации и стабилизации, которая разворачивзет ЛА по углу рыскания ма величину р и затем стабилизирует его. Благодаря этому угловые скорости ЛА по тангажу, крену и рысканию, а также угол крена устанавливаются равными нулю. В очередной момент времени с шестого выхода системы 4 вычисления компенсационной скорости движения фотопленки импульс поступает на управляющий вход датчика 2 угла рыскания, в результате чего текущее значение угла рыскания ip с выхода датчика 2 угла рыскания поступает на второй вход системы 4 вычисления компенсационной скорости движения фотопленки, которая затем рассчитывает величину скорости v, которая с четвертого выхода системы вычисления компенсационной скорости движения фотопленки поступает на информационный вход фотоаппарата 6, в котором скорость протяжки фотопленки устанавливается равной v. При поступлении с третьего выхода системы 4 вычисления компенсационной скорости движения фотопленки импульса определенной длительности т на управляющий вход фотоаппарата 6, производится съемка в течение времени г с компенсационной скоростью v движения фотопленки. Таким образом, в предложенном способе при определении угла разворота 1р ЛА и компенсационной скорости v дополнитель- но учитываются изменения линейной скорости поверхности Земли в точке съемки в зависимости от величины угла тангажа ЛА, текущих значений аргумента широты ЛА, превышения h, параметров орбиты ЛА. Это повышает точность компенсации сдвига изображения, т.е. обеспечивает достижение поставленной цели изобретения.
Формулаизобретения Способ формирования изображения при фотографировании с летательного аппарата, заключающийся в развороте летательного аппарата на углы а и рыскания if), стабилизации летательного аппарата, on- ределении угловых скоростей по осям тангажа, крена и рыскания и угла крена летательного аппарата и при равенстве этих значений нулю, экспонировании фотопленки, перемещаемой со скоростью v, о т л и- чающийся тем, что, с целью повышения качества изображения путем повышения точности компенсации сдвига изображения, определяют эксцентриситет е, наклонение i, фокальный параметр р орбиты летательного аппарата и аргумент перигея со летательного аппарата и определяют угловую скорость восходящего узла орбиты летательного аппарата из зависимости
е (1-e2)3/2cosl(«pV/2 ,
где QJ - угловая скорость вращения Земли; Ј - параметр сжатия Земли; fi - геоцентрическая гравитационная постоянная Земли,
измеряют текущие значения угла тангажа а и аргумента широты и летательного аппарата, определяют угловую скорость летательного аппарата из зависимости
u- tTp O+lcosv)2,
где истинная аномалия летательного аппарата,
и угол рыскания из зависимости
V arctg(Po/Q),
где Ро Qb bi(cos a-bo)+b2Sln Q(u+ Qbcos)(bo-cos«-1); I cos u; i sin u;
(Ci-Vcr-CoCT);
Ј22b32;
Ci cosa+ Ј22Ьз;
Ј22b22-(ao+hX1+ecos v)/pf;
b3 b2cos or-bisin a,
/.
Ј2. ao - второй эксцентриситет и большая полуось земного эллипсоида соответственно;
h - среднее превышение района съемки над уровенной поверхностью, после чего последовательно разворачивают летательный аппарат по углу рыскания ip-, стабилизируют летательный аппарат, измеряют текущее значение угла рыскания ty и определяют компенсационную скорость движения фотопленки из зависимости
«cos V+ Qbicoslcosdcos bisin cos I cos V - -sin (bicos a+b2Sln a)}, где f - фокусное расстояние объектива.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации сдвига изображения | 1991 |
|
SU1810870A1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018894C1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018895C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2711819C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
Изобретение относится к фотосъемке. Целью изобретения является повышение точности компенсации сдвига изображения путем учета изменений линейной скорости поверхности Земли в точке съемки при развороте летательного аппарата (ЛА) по углу тангажа. Способ заключается в том, что ЛА разворачивают на углы тангажа и рыскания, величина которого определяется по формуле, стабилизируют его с тем, чтобы угловые скорости по тангажу, по крену и по рысканию, а такжё°угол крена были равны нулю, и фотопленку при экспонировании перемещают с компенсационной скоростыр, величину которой вычисляют по формуле с учетом результатов измерения фокального параметра, эксцентриситета, наклонения орбиты Л А. аргумента перигея ЛА и результатов расчёта угловой скорости восходящего узла орбиты и угловой скорости ЛА-, а также результатов измерения текущих значений угла тангажа, аргумента широты и угла раскрытия Л А. 1 ил. i« : t
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Федоров Б.Ф | |||
| Аппаратура космического фотографирования | |||
| М: Недра, 1985, с | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мельканович А.Ф | |||
| Фотографические средства и их эксплуатация | |||
| МО, t984 | |||
| с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
