Изобретение относится к фотосъемке и может быть использовано в фотографических системах, устанавливаемых на летательных аппаратах (Л А).
Наиболее близким по технической сущности к предлагаемому техническому решению является способ компенсации сдвига изображения, заключающийся в том, что уменьшают скорость изображения относительно фотопленки протяжкой ее с компенсационной скоростью, а линейные скорости изображения,, обусловленные вращениями фотоаппарата, сводят до допустимых значений уменьшением угловых скоростей (стабилизацией) фотоаппарата. При этом поперечную скорость, обусловленную поступательными перемещениями фотоаппарата, сводят до допустимых значений, выбирая углы рыскания ч/. ЛА по формуле
V arctg(Wy/Wx),
(D
где Wx, Wy - продольная и поперечная составляющие линейной скорости ЛА.
Недостаток способа-прототипа состоит в невысокой точности компенсации сдвига изображения из-за того, что не учитывается влияние на продольную и поперечную составляющие сдвига изображения величины радиальной скорости ЛА при перспективной съемке с разворотом Л А по углу тангажа.
Целью изобретения является повышение точности компенсации сдвига изображения путем учета величины радиальной скорости ЛА при перспективной съемке с разворотом ЛА по углу тангажа.
Поставленная цель достигается тем, что сначала измеряют фокальный параметр Р, эксцентриситет е, наклонение f орбиты ЛА. аргумент перигея ш ЛА и рассчитывают угловую скорость восходящего узла орбиты ЛА
00
Е
00
VJ о
О, -{ Qj+ e(1-e2)3/2cosi(M Р7) 1 2, (2) где Qb - угловая скорость вращения Земли,
.Е- параметр, характеризующий сжатие Земли,
(Л - геоцентрическая гравитационная постоянная Земли. Затем измеряют текущие значения угла тангажа а, аргумента широты U, радиальной скорости Z ЛА, вычисляют угловую скорость Л А
U (1+ecosvf.(3) где ft) - истинная аномалия ЛА (4)
модуль радиус-вектора Л А (1+ecosv)
и угол рыскания V arctg(Po/Q),
где Р0 .(cos a -b0)+b2Sln a.
Q(U+ Qs pos iXboCos а -1Н + b0sinaZ/r0, где bi sinicosU,
b2 sinlslnU.
(Сг-УсЗ - С0С2).
гдеС0 1+ Ј22Ь2з,
Ci cosa+ кг Ьз. Ј22b22-t(a0+h),
где ft. Эо - второй эксцентриситет и большая полуось земного эллипсоида соответственно,
h.- среднее превышение района съемки над уровненной поверхностью.
b3 b2cos ct-bisin а
после чего последовательно разворачивают ЛА по углу рыскания на угол чр ,стабилизи- руют Л А, измеряют текущее значение угла рыскания и вычисляют компенсационную скорость движения фотопленки
v f1{bo Ucos a cosҐi/ + Q,(cosi cos ax
cos -bisini/OHJcos V - -Јi{cosicos -sin(bicosa + 16 +b2Sin a)}+-sin a cos у Z/r0},
где f 1 - фокусное расстояние объектива фотоаппарата.
Предложенные отличительные признаки позволяют достигнуть поставленную
(2) мли,
атие
нная текуента, вы(3) (4)
(5)
(6)
(7)
(8)
(9)
(Ю)
ID (12)
(13)
(14)
больетстемки
15)
вают лизи- угла ционax
16
а фоизнанную
цель изобретения, поэтому являются существенными.
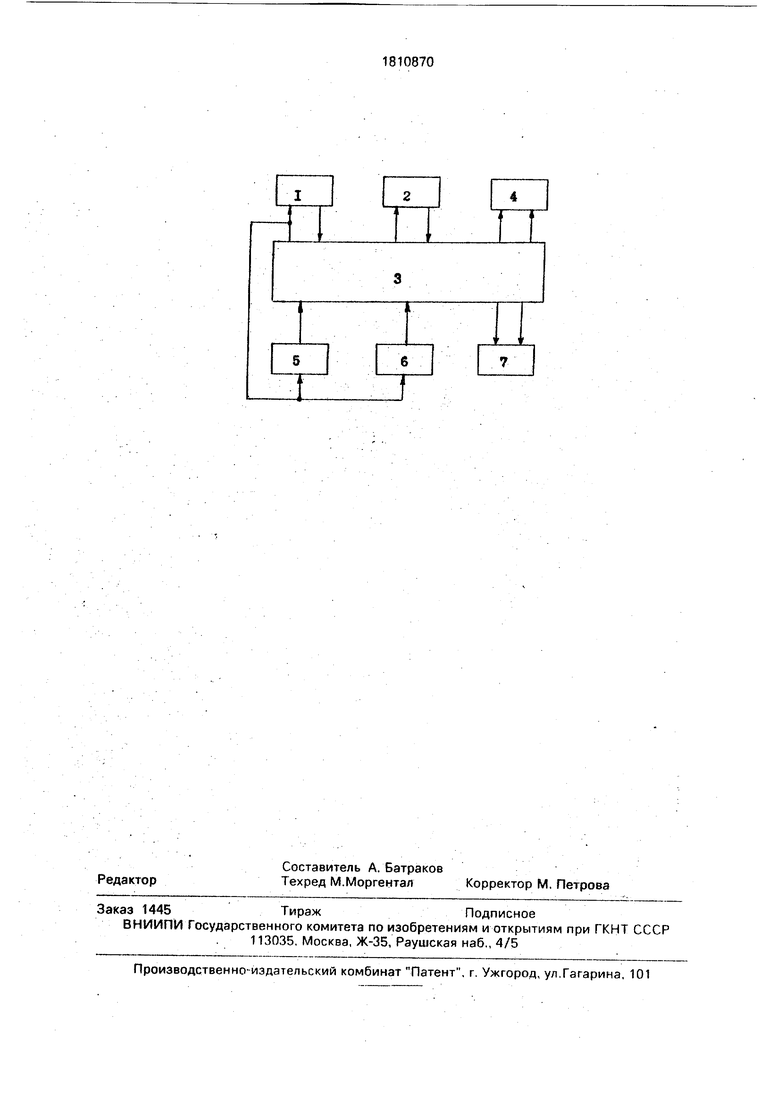
На чертеже приведена структурная схема устройства, позволяющего реализовать
5 предложенные способ, где цифрами обозначены: 1 - датчик аргумента широты, 2 - датчик угла рыскания, 3 - цифровая вычислительная машина (ЦВМ), 4 - система ориентации и стабилизации (СОС), 5 - датчик
10 угла тангажа, 6 - датчик радиальной скорости, 7-фотоаппарат.
Датчики 1, 2, 5 и 6 выполнены цифровыми. Выход датчика аргумента широты 1 подключен к первому входу ЦВМ 3, первый
15 выход которой соединен с первым входом СОС 4, второй вход которого подключен к второму выходу ЦВМ 3, третий выход которого соединен с информационным входом фотоаппарата 7, управляющий вход которо20 го подключен к четвертому выходу ЦВМ 3. Выход датчика угла рыскания 2 соединен с вторым входом ЦВМ 3, пятый выход которой подключен к управляющим входам датчика аргумента широты 1, датчика угла
25 тангажа 5и датчика радиальной скорости 6, выход которого подключен к четвертому входу ЦВМ 3. Выход датчика угла тангажа 5 соединен с третьим входом ЦВМ 3. Выход датчика угла тангажа 5 соединен с третьим
30 входом ЦВМ 3, шестой выход которой подключен к управляющему входу датчика угла рыскания 2.
В исходном состоянии в ЦВМ 3 записывают следующие исходные данные - значе35 ния Ј2, а0, h, Оз, е, fi, P, e, i, o, f1, а также программа работы и алгоритмы расчета угла (последовательно по формулам 2,4,3,5,9, 10, 15, 12, 13, 14, 11, 7, 8, .6). и скорости v (последовательно по формулам 2, 4, 3, 5, 9,
40 ю, 15,12,13,14,11V16). ЦВМ 3, отрабатывая программу работы, в определенный момент времени со своего второго выхода подает требуемое значение угла тангажа «на второй вход СОС 4, которая поворачивает ЛА
45 на угол а по тангажу и затем стабилизирует его. Благодаря этому угловые скорости Л А по тангажу, крену и рысканию, а также углы крена и рыскания устанавливаются равными нулю. В следующий момент времени на
50 пятом выходе ЦВМ 3 формируется синхроимпульс, который поступает на управляющие входы датчика аргумента широты 1, датчика угла тангажа 5 и датчика радиальной скорости 6. Благодаря этому одновре55
менно текущие значения аргумента широты U, угла тангажа сс и радиальной скорости Z с .выходов соответствующих датчиков 1, 2 и 6 поступают соответственно на первый, третий и четвертый входы ЦВМ 3, которая рассчитывает величину угла рыскания лр , которая с первого выхода ЦВМ 3 поступает на первый вход СОС 4, которая разворачивает ЛА по углу рыскания на величину ip и затем стабилизирует ЛА; В очередной момент вре- мени на шестом выходе ЦВМ 3 формируется импульс, который поступает на управляющий вход датчика угла рыскания 2, благодаря чему текущее значение угла рыскания 1р с выхода датчика 2 поступает на второй вход ЦВМ 3, которая затем рассчитывает величину скорости V, которая с третьего выхода ЦВМ 3 поступает на информационный вход фотоаппарата 7, в котором скорость протяжки фотопленки устанавливается пропор- циональной v и по поступлении импульса с четвертого выхода ЦВМ 3 на его управляющий вход производится съемка.
Таким образом, в предложенном способе при определении угла разворота и компенсационной скорости v дополнительно учитывается величина радиальной скорости Л А. Это повышает точность компенсации сдвига изображения, т.е. обеспечивает достижение поставленной цели изобретения.
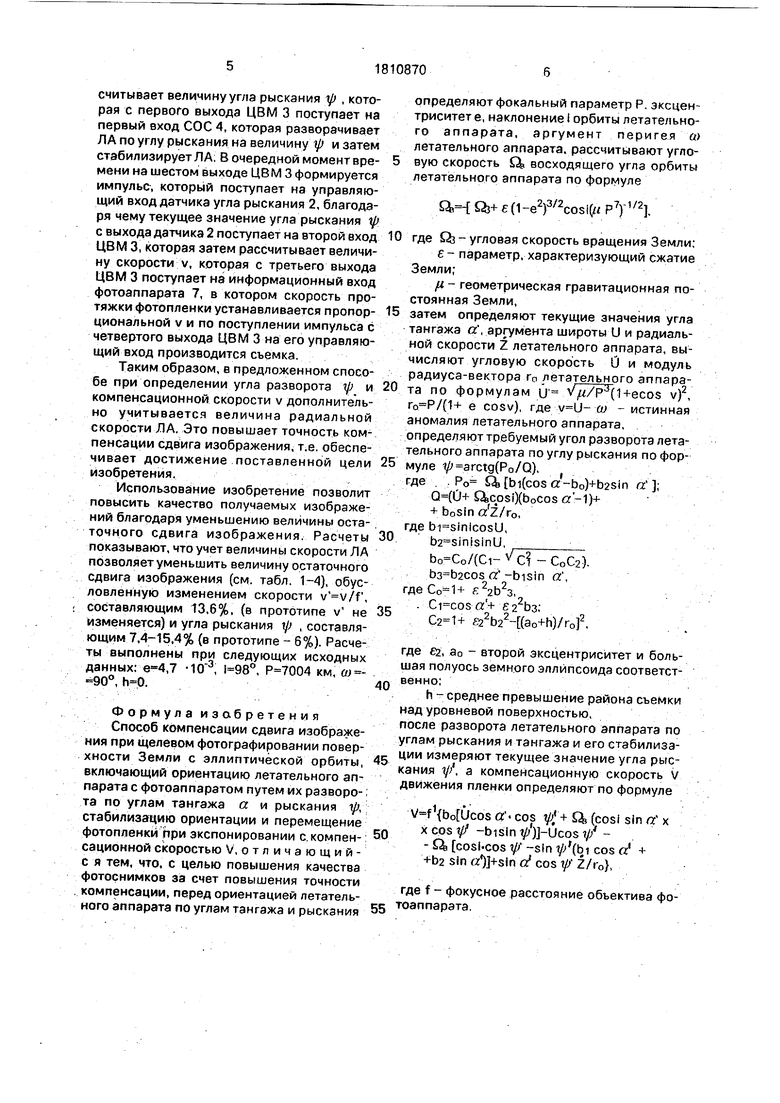
Использование изобретение позволит повысить качество получаемых изображений благодаря уменьшению величины остаточного сдвига изображения. Расчеты показывают, что учет величины скорости ЛА позволяет уменьшить величину остаточного сдвига изображения (см. табл. 1-4), обусловленную изменением скорости , составляющим 13,6%, (в прототипе v не изменяется) и угла рыскания у , составляющим 7,4-15,4% (в прототипе -6%). Расчеты выполнены при следующих исходных данных: ,7 , , км, 90°, .
Формула изобретения Способ компенсации сдвига изображения при щелевом фотографировании поверхности Земли с эллиптической орбиты, 45 включающий ориентацию летательного аппарата с фотоаппаратом путем их разворо-; та по углам тангажа а и рыскания v стабилизацию ориентации и перемещение фотопленки при экспонировании с. компен-: 50 сационной скоростью V, отличающий- с я тем, что, с целью повышения качества фотоснимков за счет повышения точности компенсации, перед ориентацией летательного аппарата по углам тангажа и рыскания 55
определяют фокальный параметр Р. эксцентриситет е, наклонение I орбиты летательного аппарата, аргумент перигея й летательного аппарата, рассчитывают угловую скорость Ц, восходящего угла орбиты летательного аппарата по формуле
ОН: Оз+ е (1-e2)3/2cosi(« P7) 1/2.
где Оз- угловая скорость вращения Земли;
е - параметр, характеризующий сжатие Земли;
/и - геометрическая гравитационная постоянная Земли,
затем определяют текущие значения угла тангажа а , аргумента широты U и радиальной скорости Z летательного аппарата, вычисляют угловую скорость 0 и модуль радиуса-вектора г0 летательного аппарата по формулам 0 (1+ecos v)2, га Р/{1+ е cosv), где ш - истинная аномалия летательного аппарата, определяют требуемый угол разворота летательного аппарата по углу рыскания по формуле .arctg(Po/Q). , где . . Р0 (cosa-b0)+b2sin
Q(0+ QjCosiXboCos a -1)+
+ bosin a z/ro, где bi sinlcosU,
b2 sinisinU,
(Ci-Vd -C0C2). D3 b2cos d -bisin a где 2аЬ2з, . Ci cosa + Ј22Ьз; 2b22-(ao+h),
где Ј2, a0 - второй эксцентриситет и большая полуось земного эллипсоида соответственно;
h - среднее превышение района съемки над уровневой поверхностью, после разворота летательного аппарата по углам рыскания и тангажа и его стабилизации измеряют текущее значение угла рыскания . а компенсационную скорость V движения пленки определяют по формуле
V f botUcosa -cos V-i + (cosi sin a x X cos ijf -bisin V J-Ucos -ф1 - Qe cosl-cos V; -sin (bi cos « +
sin «OJ+sin d cos iff Z/r0),
где f - фокусное расстояние объектива фотоаппарата.
Таблица 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования изображения при фотографировании с летательного аппарата | 1991 |
|
SU1820358A1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018894C1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018895C1 |
| Устройство управления боковым движением летательного аппарата | 1990 |
|
SU1751717A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И НЕСТАЦИОНАРНЫХ АЭРОДИНАМИЧЕСКИХ ПРОИЗВОДНЫХ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531097C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
Использование: изобретение относится к фотосъемке. Сущность изобретения: Л А разворачивают на углы тангажа и рыскания, величина которого определяется по новой формуле, стабилизируют его с тем. чтобы угловые скорости по тангажу, по крену и по рысканию, а также угол крена были равны нулю, и фотопленку при экспонировании перемещают с компенсационной скоростью, величину которой вычисляют по нОвой формуле с учетом результатов измерения фокального параметра, эксцентриситета, наклонения орбиты ЛА, аргумента перигея ЛА и результатов расчета угловой скорости восходящего угла орбиты и угловой скорости Л А, а также результатов измерения текущих значений угла тангажа, аргумента широты, ymf рыскания и радиальной скорости ЛА. 4 табл.
,-з „-т
Результаты расчета скорости v-10 , с в предлагаемом способе
Результаты расчета угла ty , град, в предлагаемом способе
Результаты расчета скорости , в прототипе
Результаты расчета угла г/J , град, в прототипе
,-з „-т
, с
Таблица 2
Т а б л и ц а 3
Таблица 4
| Мёлькэнович А | |||
| В | |||
| Фотографические средства и их эксплуатация, МО, 1984 | |||
| с | |||
| Способ бокового каротажа скважин | 1961 |
|
SU149157A1 |
