Изобретение относится к области космической техники и может быть использовано при управлении движением космических аппаратов (КА).
В настоящее время известны различные средства и методы управления движением КА, применяемые для коррекции орбиты КА, стабилизации и ориентации КА. Системы управления могут существенно различаться по конструкции, энергопотреблению, типу исполнительных органов в зависимости от решаемых задач управления, массы КА и орбиты его движения, а также от продолжительности корректирующих маневров. Система управления КА может одновременно осуществлять как управление движением центра масс КА, так и управление движением КА относительно его центра масс КА.
Наиболее близким аналогом является «Способ управления движением космического аппарата и система управления» (патент на изобретение RU 2309876 С1). Способ управления движением космического аппарата, заключающийся в управлении движением центра масс космического аппарата и в управлении угловой ориентацией космического аппарата в пространстве, включающий управляющее воздействие на космический аппарат посредством включения, по крайней мере, одного реактивного двигателя малой тяги двигательной установки космического аппарата, создающего вектор тяги относительно трех главных ортогональных осей инерции космического аппарата. Управляющие воздействия создают с помощью двигателей малой тяги, располагаемых в общей установочной плоскости космического аппарата, ортогональных одной из его плоскостей инерции, с угловым смещением между ближайшими двигателями.
Ряд существенных недостатков, характерных для прототипа, заключается в следующем:
1. эффективность использования тяги приведенных в примерах реализации изобретения достигается за счет использования двух двигателей малой тяги, что приводит к увеличению необходимой мощности энергетической установки КА, т.к. коррекция орбиты занимает 1,5-3 часа в сутки, в остальное время мощность энергоустановки не будет использоваться, что ведет к не оптимальности проектируемого КА;
2. двигатели размещены равномерно на корпусе КА. Во время создания управляющего воздействия, струя двигателя будет создавать возмущающие моменты при воздействии на элементы КА (солнечные батареи, антенны и т.д), которые необходимо компенсировать при управлении угловым положением КА и соответственно требуют дополнительных затрат ресурсов КА (топлива).
Задачами, на решение которой направлено заявляемое изобретение являются:
1. Снижение массы КА за счет снижения массы двигательной установки;
2. Уменьшение возмущающих моментов, создаваемых двигателями малой тяги во время создания управляющего воздействия;
3. Снижение массы КА за счет оптимального использования энергетической установки КА;
Для решения поставленной задачи предлагается способ управления движением космического аппарата, заключающийся в управлении движением центра масс космического аппарата и в управлении угловой ориентацией космического аппарата в пространстве, включающий управляющее воздействие на космический аппарат посредством включения, по крайней мере, одного реактивного двигателя малой тяги, двигательной установки космического аппарата, создающего вектор тяги относительно трех главных ортогональных осей инерции космического аппарата. Управляющие воздействия создаются с помощью двигателей малой тяги, расположенных в паре симметрично по отношению к плоскости осей крена и рысканья космического аппарата. Линии действия тяг двигателей направлены под углом к главным осям инерции, каждая пара двигателей отклонена от плоскости осей тангажа и крена на а градусов, а вектора тяг каждого из двигателей в плоскостях расположения пары двигателей отклонены от плоскости осей тангажа и рысканья на |3 градусов.
В частных случаях реализации изобретения каждый двигатель смонтирован на приводе и способен изменять свое угловое положение. Изменение направления векторов тяги позволяет создавать управляющие моменты тяги относительно трех главных ортогональных осей инерции КА.
Использование указанных возможностей позволяет проводить во время операций по управлению движением центра масс космического аппарата операции по гашению кинетического момента (разгрузки) инерциальных средств управления КА, например гироскопических силовых стабилизаторов (маховиков).
Использование указанных возможностей позволяет производить программные повороты КА при ориентации.
Техническими результатами, обеспечиваемыми приведенной совокупностью признаков, являются:
1. снижение массы энергетической установки КА, которое достигается при использовании способа управления движением КА, предполагающего оптимальную ориентацию вектора тяги при включении одного двигателя, как следствие более оптимальное проектирование КА;
2. снижение массы двигательной установки за счет снижения количества двигателей малой тяги;
3. снижение возмущающих моментов от действия струй двигателей, т.к. углы α и β выбираются исходя из приоритетного условия минимизации расхода топлива и дополнительного условия минимальных воздействий на элементы конструкции КА.
Сущность изобретения поясняется чертежами, на которых изображено:
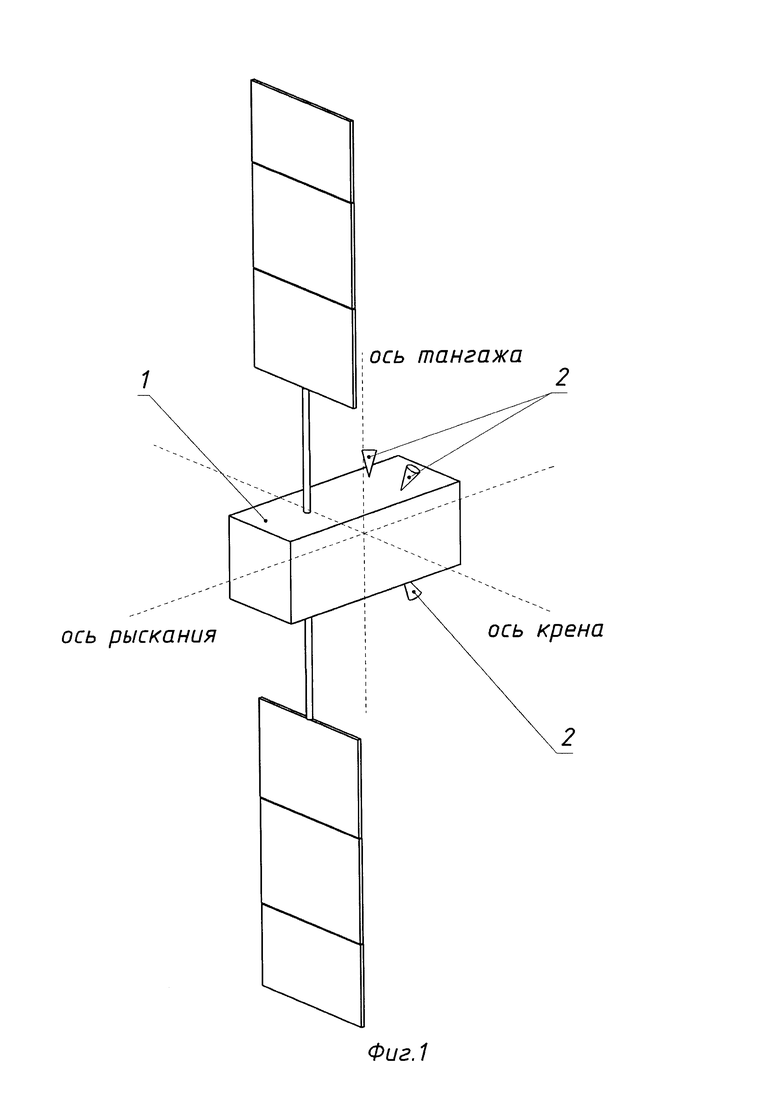
- на фиг. 1 - изображен схематичный вид спутника;
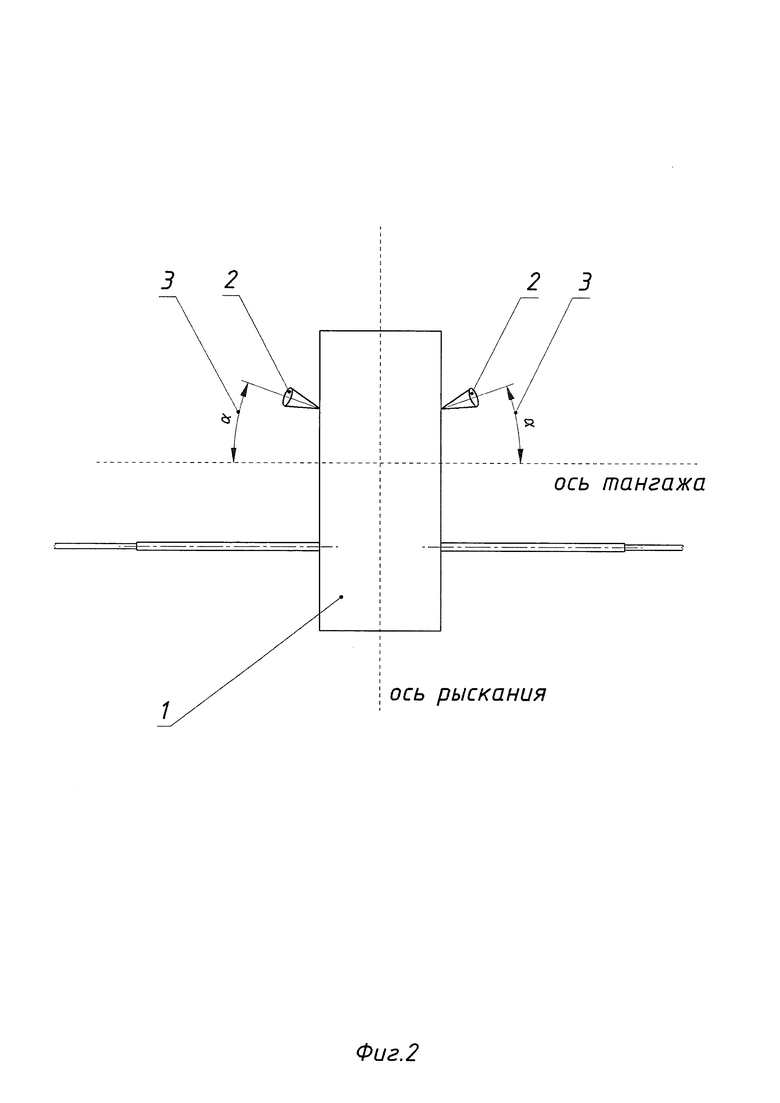
- на фиг. 2 - схематично показан корпус КА с установленными двигателями (вид сверху);
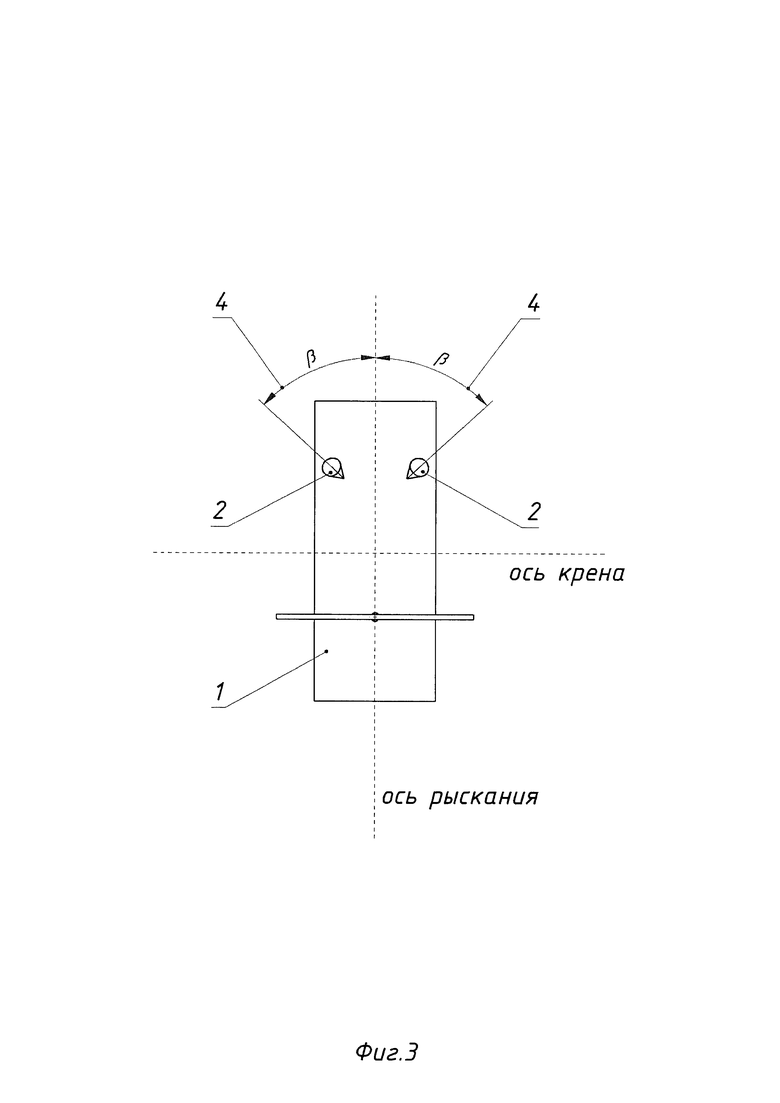
- на фиг. 3 - схематично показан корпус КА с установленными двигателями (вид сбоку);
- на фиг. 4 - схематично показан частный случай реализации изобретения, при различных углах установки двигателей малой тяги.
Способ управления движением космического аппарата 1, заключающийся в управлении движением центра масс космического аппарата и в управлении угловой ориентацией космического аппарата в пространстве, включающий управляющее воздействие на космический аппарат посредством включения, по крайней мере, одного реактивного двигателя малой тяги 2 двигательной установки космического аппарата, создающего вектор тяги относительно трех главных ортогональных осей инерции космического аппарата. Управляющие воздействия создаются с помощью двигателей малой тяги 2, расположенных в паре симметрично по отношению к плоскости осей крена и рысканья космического аппарата 1. Линии действия тяг двигателей направлены под углом к главным осям инерции, каждая пара двигателей отклонена от плоскости осей тангажа и крена на α градусов 3, а вектора тяг каждого из двигателей в плоскостях расположения пары двигателей отклонены от плоскости осей тангажа и рысканья на β градусов 4.
Получение технических результатов гарантируется при применении нижеприведенной стратегии удержания КА на геостационарной орбите по широте и долготе.
Стратегия проведения коррекций удержания КА по широте и долготе должна минимизировать расход топлива. Анализ показывает, что основные затраты топлива на интервале длительного функционирования КА (15 и более лет) связаны с его удержанием по широте.
Для экономии импульса скорости все короткопериодические составляющие возмущения вектора наклонения выделяются в некорректируемую группу. Коррекции удержания по широте обеспечивают компенсацию вековой составляющей изменения вектора наклонения, обусловленной лунно-солнечными возмущениями.
Направления векторов тяг двигателей выбираются исходя из минимального расхода топлива за САС и минимального влияния двигателей на элементы КА.
Для коррекции широты выбираются такие участки орбиты и продолжительность работы двигателей коррекции (ДК), чтобы оптимально изменить вектор наклонения. На каждом витке полета теоретически имеется два таких участка орбиты (разнесенные по аргументу широты на 180°). При этом продолжительность работы двигателей коррекции на обоих участках одинакова, а направления корректирующих ускорений в направлении «Север-Юг» противоположны. Выбор участка орбиты, продолжительность работы ДК зависят от текущего положения вектора наклонения КА и параметров стратегии удержания.
Удержание КА по долготе сводится к коррекциям периода обращения КА и эксцентриситета орбиты, которые должны компенсировать влияние возмущающих сил, прежде всего, нецентральности гравитационного поля Земли и светового давления.
Схема размещения ДК такова, что при коррекции вектора наклонения также происходит изменение вектора эксцентриситета и сидерического периода. Необходимое изменение периода обращения обеспечивается за счет либо выбора двигателя (имеющего требуемый знак трансверсального ускорения) либо последовательного включения двух двигателей, имеющих противоположные трансверсальные ускорения.
Что касается управления вектором эксцентриситета, то можно использовать следующий алгоритм:
а) На витке планируются коррекции наклонения одним включением, при котором обеспечивается изменение периода обращения в нужном направлении. Из двух возможных вариантов (двигатель «северного» или двигатель «южного» направления) выбирается тот участок орбиты, где, по крайней мере, не ухудшается значение эксцентриситета.
б) Если один двигатель не обеспечивает требуемое изменение периода обращения, то рассчитывается маневр для пары двигателей одного направления по север (юг). При этом из двух возможных пар включений (двигатели «северного» или «южного» направления) выбирается более оптимальная для эксцентриситета
в) Если коррекций наклонений недостаточно и эксцентриситет больше заданного порогового значения, то на витке планируется коррекция эксцентриситета двумя включениями, разнесенными на 12 часов. Для этого двигатели включаются на участках орбиты, оптимальных для изменения эксцентриситета (в окрестности перигея и апогея, например). При этом одновременно изменяются период обращения и эксцентриситет орбиты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2708468C1 |
| КОСМИЧЕСКИЙ АППАРАТ С ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ МАЛОЙ ТЯГИ | 2001 |
|
RU2223893C2 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2787522C1 |
| СПОСОБ ОДНОВРЕМЕННОЙ КОРРЕКЦИИ УДЕРЖАНИЯ ВЕКТОРА НАКЛОНЕНИЯ КРУГОВОЙ ОРБИТЫ И ПЕРИОДА ОБРАЩЕНИЯ ТРЕХОСНОСТАБИЛИЗИРОВАННОГО КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2381965C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2767794C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |

Изобретение относится к совместному управлению движением центра масс и угловой ориентацией космических аппаратов (КА) с помощью двигателей малой тяги. Двигатели расположены попарно симметрично плоскости осей крена и рысканья КА, а линии действия их тяг проходят через центр масс КА и направлены под углом к главным осям инерции КА. Двигатели пары отклонены от плоскости осей тангажа и крена на некоторый угол, а от плоскости осей тангажа и рысканья - на некоторый другой угол. Последовательно включают двигатели, создающие противоположные трансверсальные ускорения. Выбирают участок орбиты и продолжительность включения требуемого двигателя в зависимости от текущего положения вектора наклонения орбиты. Направление тяги выбирают, исходя из минимального расхода рабочего тела при минимальном влиянии на элементы конструкции КА. Техническим результатом являются оптимизация расхода рабочего тела для удержания КА по широте и долготе, снижение массы энергодвигательной установки и уменьшение возмущающих моментов от действия струй двигателей. 1 з.п. ф-лы, 4 ил.
1. Способ управления движением космического аппарата, заключающийся в управлении движением центра масс космического аппарата посредством реактивных двигателей малой тяги его двигательной установки, создающих вектор тяги относительно трех главных осей инерции космического аппарата, отличающийся тем, что управляющее воздействие формируют с учетом компенсации внешних возмущающих сил посредством последовательного включения двигателей малой тяги, создающих противоположные трансверсальные ускорения и расположенных под углом относительно плоскости осей тангажа и крена, а также плоскости осей тангажа и рысканья космического аппарата, в заданный момент времени, при этом выбор участка орбиты для включения определенного двигателя малой тяги и продолжительности его работы осуществляют в зависимости от текущего положения вектора наклонения орбиты, выбирая направление векторов тяги двигателей исходя из минимального расхода топлива при минимальном влиянии на элементы космического аппарата.
2. Способ по п. 1, отличающийся тем, что реактивные двигатели малой тяги могут быть плазменными, ионными или электродуговыми.
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2309876C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 5130931 A, 14.07.1992. | |||

