Изобретение относится к области комплексного контроля пилотажно-навигационного комплекса систем управления летательными аппаратами и в частности к средствам аппаратурно-безызбыточного контроля ориентации и навигации беспилотных и дистанционно пилотируемых летательных аппаратов, минимального веса, габаритов, энергопотребления, сложности и стоимости. Оно также может быть использовано для создания простых и высоконадежных средств контроля и резервных каналов пилотажно-навигационных систем современного самолета, защищенных от отказов и сбоев основной многократно резервированной сложной гироинерциальной системы управления.
Известен способ контроля пилотажно-навигационного комплекса с применением пороговой оценки результатов измерений сигналов комплекса и параметров полета [Беляевский Л.С., Новиков B.C., Олянюк П.В. Обработка и отображение радионавигационной информации. - М.: Радио и связь, 1990. С.114-119; Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. - М.: Машиностроение, 1991. С.35, 42, 91 и др.]. Способ состоит в n-кратном измерении контролируемого параметра, вычислении отношения правдоподобия с учетом среднего риска принятия решения об исправности комплекса. Для достоверного контроля необходимо иметь точное описание законов распределения всех контролируемых полетных параметров комплекса, что практически невозможно. Усложнение способа, построение оптимального решающего правила при аддитивной связи контролируемых сигналов и погрешностей измерения приводит к проверке сложных гипотиз контроля. Такой контроль при широких диапазонах изменения проверяемых сигналов рыскания, крена, тангажа, широты, долготы аппарата крайне затруднен.
Известен и широко применяется способ контроля пилотажно-навигационных комплексов на основе заранее определенных тестов [Богданченко Н.М. Курсовые системы и их эксплуатация. - М.: Транспорт, 1983, С.105; Руководство по технической эксплуатации самолета ИЛ-86. Под ред. С.В.Кузнецова. 2009; Бородин В.Т., Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. - М.: Машиностроение, 1978. С.133]. Контроль на земле может проводиться в статическом и динамическом режимах. Статический режим основан на подборе заранее определенных тестов, которые подаются в контролируемые датчики. Реализуется два вида оценки: либо контрольные коды поступают из постоянного запоминающего устройства БЦВМ, а оценка результатов производится визуально по приборам комплекса, либо значения контрольных параметров поступают из датчиков комплекса в БЦВМ, где производится их сравнение с уставками. Входная информация анализируется на совпадение с заданной. Сравнением определяется отказ систем и комплекса. Динамический режим или имитация полета применяется для проверки функционирования программ в БЦВМ. Он производится в реальном или ускоренном масштабе времени. Способ применим для предполетного или регламентного контроля, его применение в полете нарушает нормальное функционирование пилотажно-навигационного комплекса и требует вмешательства летчика.
Известен способ контроля пилотажно-навигационного комплекса самолета ИЛ-86 [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. - М.: Транспорт, 1992. С.290, 368, 375; Морозов В.В. Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его эксплуатация. Учебное пособие. - Ульяновск: Центр ГА СЭВ, 1989], в котором широко применяется аппаратная избыточность датчиков курса, рыскания, тангажа, крена трех инерциальных курсовертикалей (ИКВ), резервированных блоков датчиков угловых скоростей (БДГ), датчиков скоростей, реализуемый мажоритарными блоками контроля крена (БКК), базовой системой курса и вертикали (БСКВ), блоком формирования команд (БФК). Среднее значение трех одноименных полетных параметров с мажоритарного блока сравнивается с выходными сигналами датчиков и по рассогласованию делается вывод об исправности соответствующего датчика системы. Такой способ обеспечивает достаточно высокую информационную производительность (I1=4 бит/с [1, с.11-13]) обнаружения отказов пилотажно-навигационного комплекса аэробуса ИЛ-86, где трехкратное увеличения веса, габаритов, энергопотребления, стоимости приборного оборудования вполне допустимо. Однако сложность такого контроля и, как следствие, его низкая надежность и достоверность обнаружения отказа именно датчиков комплекса, содержащего например типовые элементы: инерциальную курсовертикаль ИКВ-802 (среднее время наработки на отказ ТИКВ=500 час), блок датчиков угловых скоростей ИБД-42 (среднее время наработки на отказ ТИБД=5000 час) бортовую цифровую вычислительную машину БЦВМ80 30301 (среднее время наработки на отказ ТБЦВМ=18000 час) делает его малоэффективным (РД1=0,59; ТД1=3,8 час при полетном времени t=2 часа) и требует большого объема регламентных, предполетных работ [2]. Надежность пилотажно-навигационного комплекса при этом очень велика и составляет ТПНК=12490 час.
Известен способ контроля пилотажно-навигационного комплекса с применением его наблюдателей состояния, объединяемых фильтром Калмана или Льюенбергера [Кузовков Н.Т. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976. С.191-205; Авиационная радионавигация: Справочник. Под ред. А.А.Сосновского. - М.: Транспорт, 1990. С.30-31]. Наблюдатель состояния строится на основе модели объекта контроля и помех, подключенной параллельно и охваченной дополнительной обратной связью по сигналу рассогласования модели и объекта. При этом коэффициент обратной связи выбирается таким образом, чтобы выход модели как можно точнее совпадал с выходом контролируемого пилотажно-навигационного комплекса. Следя за величиной рассогласования, можно осуществить непрерывный контроль за исправностью системы. Основная трудность в реализации способа заключается в определении коэффициента обратной связи по адекватной модели сложного и размерного пилотажно-навигационного комплекса и нестационарных корреляционных функций его случайных помех [3, с.205; 4, с.111, 125, 128, 132 и др.].
Известен способ контроля горизонтальной ориентации аппарата [Пат. 2373562 РФ, МКИ G05D 1/08. Способ и устройство контроля горизонтальной ориентации аппарата. В.Ю.Чернов, А.К.Промахова // Б.И. 2009, №32], основанный на измерении величины и направления кажущегося линейного ускорения, с одновременным измерением текущего значения величины и направления абсолютного и кажущегося линейного ускорения аппарата, определении величины и направления разности кажущегося и абсолютного линейных ускорений с последующим определением отношений проекций разности кажущегося и абсолютного линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения силы тяжести и отношение проекции разности кажущегося и абсолютного линейного ускорения на поперечную ось связанной системы координат к проекции разности кажущегося и абсолютного линейного ускорения на нормальную ось связанной системы координат, с последующим определением контролируемой горизонтальной ориентацией по тангажу и крену, ее сравнением, как и измеряемых проекций величины и направления абсолютной угловой скорости, с выходными параметрами пилотажно-навигационного комплекса. Способ не позволяет контролировать навигационные параметры комплекса: курс, широту, долготу. Достоверность и информационная производительность контроля всего пилотажно-навигационного комплекса сравнительно невелика.
Известен способ-прототип контроля пилотажно-навигационного комплекса [Белогородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972. С.270-271]. Способ, в его трехмерной пространственной реализации, заключается в измерении величины и направления абсолютной угловой скорости аппарата. Одновременно ведется измерение величин угловых скоростей крена, тангажа, рыскания аппарата с помощью контролируемого пилотажно-навигационного комплекса и сравнение этих величин с проекциями измеренной абсолютной угловой скорости аппарата на оси связанной системы координат. Так проекция абсолютной угловой скорости на продольную ось связанной системы координат сравнивается с величиной угловой скорости крена, проекция абсолютной угловой скорости на поперечную ось связанной системы координат сравнивается с величиной угловой скорости тангажа, а проекция абсолютной угловой скорости на нормальную ось связанной системы координат сравнивается с величиной угловой скорости рыскания. В прямолинейном горизонтальном полете измерение величины и направления абсолютной угловой скорости аппарата тремя ортогонально ориентированными приборами или одним трехмерным гироскопическим измерителем, входящим в состав контролируемого пилотажно-навигационного комплекса, дает равенство названных проекций ортогональным составляющим абсолютной угловой скорости, что соответствует его исправному состоянию. Способ-прототип в наиболее простой форме позволяет вести контроль большого числа пилотажных параметров современного пилотажно-навигационного комплекса без конкретизации его технического исполнения, операции преобразования контролируемых сигналов здесь минимальные, безынерционные, легко реализуются аналоговыми и цифровыми бортовыми вычислителями в полете. Однако он применим для контроля пилотажно-навигационных комплексов только маломаневренных аппаратов, совершающих прямолинейный горизонтальный полет, при котором оси связанной системы координат совпадают с измерительными осями крена, тангажа и рыскания [1, с.17-18, 36 выражение (1.41); 5, с.21-22]. Курс, широта и долгота местоположения аппарата, определяемые проверяемым комплексом, в способе-прототипе не контролируются, а его предполетный контроль точности и работоспособности невозможен.
Известно устройство контроля пилотажных, параметров крена и тангажа - блок сравнения и предельного крена (БСПК-1) [Перескоков А.Н. Приборное оборудование вертолетов МИ-8 (Т, МТ, МТВ, АМТ). - СПб.: Академия ГА. 2003. С.19; Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. - М.: Транспорт. 1982. С.205]. Устройство содержит две следящие системы с сельсинами-датчиками двух одинаковых датчиков тангажа и крена аппарата, релейные усилители, выполняющие функции компараторов, и ламельные схемы сигнализации предельных углов крена и тангажа.
Имеет место сравнение одноименных сигналов тангажа и крена резервированных датчиков горизонта пилотажно-навигационного комплекса аппарата. Габариты, вес, энергопотребление, стоимость такого устройства велики, а информационная производительность и достоверность контроля низкие.
Известны устройства контроля пилотажно-навигационного комплекса, содержащие по три одинаковых датчика тангажа, крена, курса, скорости, высоты, угловых скоростей и мажоритарные блоки обработки их сигналов типа блока контроля крена (БКК), базовая система курса и вертикали (БСКВ), блок формирования и контроля (БФК), блок согласования (БС), блок демпфирующих гироскопов (БДГ) и др. [Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. - М.: Машиностроение, 1991. С.39, 122; Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. - М.: Транспорт, 1992. С.291]. Помимо трех одноименных контролируемых датчиков мажоритарные блоки устройств содержат три нелинейных элемента, образующих кворум-элемент, и компараторы. Последние проводят непрерывное сравнение выходных сигналов каждого из трех датчиков с их осредненным сигналом, полученным на выходе кворум-элемента. Разностный сигнал, пропорциональный крену (курсу, тангажу, угловой скорости и тд.), сравнивается с допустимой ошибкой измерения. Точность, достоверность контроля сравнительно высока во всем диапазоне измерения пилотажно-навигационного комплекса. Однако, как и для блока сравнения и предельного крена (БСПК), здесь необходимо избыточное число одноименных проверяемых датчиков, что связано с ростом стоимости, габаритов, энергопотребления, что затруднено или невозможно на легком ЛА. Так для мажоритарного блока БКК (среднее время наработки на отказ ТБКК=4500 час), при контроле ИКВ-802, достоверность контроля будет РД.БКК=0,9; ТД.БКК=19 час.
Известно устройство контроля пилотажно-навигационного комплекса орбитальной ориентации спутника [Орбитальное гирокомпасирование. Под Б.Б.Самотокина. - СПб.: Политехника, 1993. С.42-43], содержащее датчики абсолютных угловых скоростей по осям связанной системы координат и измерительное устройство - однороторную или двухроторную гироорбиту, определяющую углы крена, рыскания, тангажа ориентации спутника. Ошибки ориентации спутника по крену и рысканию взаимосвязаны с проекциями вектора абсолютной угловой скорости аппарата на оси чувствительности датчиков угловых скоростей по продольной и нормальной осям связанной системы координат. Это позволяет по сглаженным и интегрированным сигналам этих датчиков судить об исправности всего пилотажно-навигационного комплекса, совершающего сложное орбитальное движение и измеряемое гироскопическим орбитантом. Так как в исправном комплексе эти ошибки, измеренные высокочувствительными датчиками угловых скоростей, имеют ограниченное значение. Устройство достоверно проверяет датчики угловых скоростей и информацию по крену и рысканию орбитанта. Возможность контроля тангажа, курса, широты и долготы местоположения аппарата отсутствует. Применение данной схемы контроля ограничено только искусственным спутником Земли, где работоспособно специальное измерительное устройство этого пилотажно-навигационного комплекса - гироорбита.
Известно устройство интегральной распределенной вычислительной системы сбора полетной информации, контроля и диагностики бортовых систем "Регата" [Ратникова Н.А. Распределенная вычислительная система "Регата" - основа технологии контроля воздушных судов по состоянию // Авиакосмическое приборостроение, №7, 2004. С.44-52 и др.], содержащая приемные модули аналого-цифрового преобразования (АЦП 24, АЦП 32, АЦП ТП, АЦП ТР, АЦП И, АЦП 16ПТ, АЦП СКТ М, АЦП ПР М, АЦП ТН), частотные преобразователи (ВИ ЧМ, ВИ СЧ, ЧП), контроллеры межмашинного обмена (RS, ТМТ, КПИ М, РК, КПИ), системные управляющие контроллеры (процессоры 200, 300), твердотельный накопитель с процессором 300, цифровой вычислитель, систему единого времени, выносной пульт управления, устройства установки синхронизации и запросов прерывания. Модульное построение аппаратно-программных средств дает возможность наращивания вычислительных мощностей устройства, сигналы в котором обрабатываются на трех уровнях. Верхний уровень проверяет выполнение взаимосвязей параметров состояния проверяемых систем. Средний уровень экспертных систем анализирует текущую и доопытную информацию об отказах по методам теории нечетких выводов с привлечением знаний специалистов экипажа. На нижнем уровне для заданного диапазона изменения нормированных сигналов ведется вероятностно-гарантированная оценка состояния исправности приборов с привлечением известных статистических критериев качества. Предполагается, что известны траектория движения ЛА, совокупность контролируемых параметров и их эталонные области значений. Отклонение нормированных контролируемых параметров и эталонных значений в полете статистически проверяется. Детерминизм значений существенно ограничивает область контроля, а статистика обработки ведет к запаздыванию результата, зависимому и от привлечения к контролю доопытной информации (ее может вообще не быть) и специалистов экипажа, который занят управлением ЛА. Сложность устройства "Регата", как централизованной интегральной системы контроля всего самолета, и, как результат, его низкая собственная надежность отрицательно влияют на достоверность обнаружения отказов отдельных особенно высоконадежных систем самолета, каким и является пилотажно-навигационного комплекс. Степень автоматизации контроля в полете без участия экипажа, наземного предполетного и послеполетного обслуживания по базам данных желательно повысить, что исключительно актуально для беспилотных ЛА [6, с.79].
Наиболее близким к заявляемому устройству контроля пилотажно-навигационного комплекса - прототипом устройства, является система [Белогородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972. С.270-271], содержащая датчики абсолютных угловых скоростей аппарата по продольной, нормальной и поперечной осям связанной системы координат аппарата, датчики углов крена, рыскания, тангажа аппарата, первый, второй, третий дифференциаторы, первую, вторую, третью схемы вычитания, первый, второй, третий компараторы и логическую схему ИЛИ. Датчик абсолютной угловой скорости аппарата по продольной оси связанной системы координат соединен с вычитающим входом первой схемы вычитания, выход которой через первый компаратор соединен с входом логической схемы ИЛИ. При этом датчик угла крена аппарата соединен с первым дифференциатором, выход которого подключен ко второму входу первой схемы вычитания. Датчик абсолютной угловой скорости аппарата по нормальной оси связанной системы координат соединен с вычитающим входом второй схемы вычитания, выход которой через второй компаратор соединен с входом логической схемы ИЛИ. При этом датчик угла рыскания аппарата соединен со вторым дифференциатором, выход которого подключен ко второму входу второй схемы вычитания. Датчик абсолютной угловой скорости аппарата по поперечной оси связанной системы координат соединен с вычитающим входом третьей схемы вычитания, выход которой через третий компаратор соединен с входом логической схемы ИЛИ. При этом датчик угла тангажа аппарата соединен с третьим дифференциатором, выход которого подключен ко второму входу третьей схемы вычитания, изменения этого параметра [7, с.271]. Выход логической схемы ИЛИ является выходом устройства. Устройство контроля, выбранное за прототип, является частным случаем простейшего устройства сравнения сигналов двух датчиков информации, один из которых дает информацию о контролируемом параметре, а другой - о скорости его изменения.
Отсутствие избыточных датчиков, необходимых для обнаружения отказа, сделало целесообразным применение этого устройства в пилотажно-навигационных комплексах легких аппаратов. Оно использует информацию датчиков уже имеющихся на борту и входящих в состав штатного приборного оборудования. Устройство контроля, принятое за прототип, является наименьшим по весу, стоимости, габаритам и энергопотреблению. Достоверность контроля датчиков крена, тангажа, рыскания, датчика абсолютной угловой скорости аппарата по продольной оси связанной системы координат, датчика абсолютной угловой скорости аппарата по нормальной оси связанной системы координат, датчика абсолютной угловой скорости аппарата по поперечной оси связанной системы координат пилотажно-навигационного комплекса с ИКВ-802, ИБД-42 и БЦВМ80 30301 сравнительно велика - РД.2=0,92; ТД.2=23 час, что обусловлено простотой программной или микросхемной реализации устройства. Информационная производительность контроля I2=3,391 бит/с.
Недостатком устройства является его неспособность контролировать датчики широты и долготы пилотажно-навигационного комплекса. Кроме того, его высокая эффективность имеет место лишь в частном случае, при работе на аппарате, совершающем прямолинейный, горизонтальный полет, когда
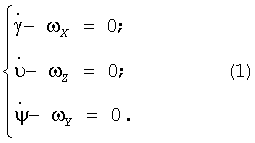
В общем случае сложного пространственного движения, характерного для легкого, маневренного аппарата, приближенное соотношение (1), лежащее в основе работы устройства контроля - прототипа, не выполняется, так как имеют место следующие точные кинематические соотношения, связывающие производные углов крена  , тангажа
, тангажа  , рыскания
, рыскания  аппарата и проекции ωX, ωY, ωZ вектора угловой скорости на связанные оси [5, с.22]
аппарата и проекции ωX, ωY, ωZ вектора угловой скорости на связанные оси [5, с.22]
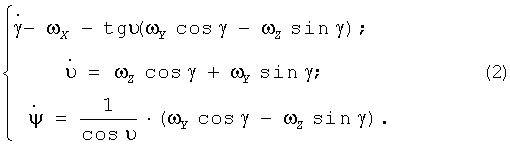
Это указывает на невозможность достоверного контроля устройством-прототипом датчиков при υ≠0, γ≠0. Кроме того, соотношения (2) имеют особенность при υ→90°, что делает невозможным использование сигналов  , , для контроля на высокоманевренном аппарате.
, , для контроля на высокоманевренном аппарате.
Основной задачей, на решение которой направлены заявленный способ и устройство, является создание аппаратурно-безызбыточных комплексных систем автоматического управления и контроля повышенной точности, надежности, достоверности контроля с высокими технико-экономическими показателями по весу, габаритам, энергопотреблению, стоимости, удобству их эксплуатации на легком летательном аппарате.
Техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение достоверности обнаружения отказа, информационной производительности, точности контроля параметров с безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости при одновременном повышении эффективности выполнения полетных задач. При этом обеспечивается работа как в полетном, так и предполетном состоянии комплекса, контроль по безынерционным соотношениям, содержащим простейшие арифметические операции, достаточно просто реализуемым на борту летательного аппарата.
Технический результат достигается тем, что в способе контроля пилотажно-навигационного комплекса, основанном на измерении величины и направления абсолютной угловой скорости аппарата, величины угловых скоростей крена, тангажа, рыскания аппарата, согласно изобретению одновременно измеряют направления угловых скоростей крена, тангажа, рыскания аппарата, величины и направления угловых скоростей Земли, долготы, широты, курса аппарата, определяют сумму величин и направлений угловых скоростей Земли, долготы, широты, курса, рыскания, тангажа, крена аппарата, а затем полученную величину и направление суммы сравнивают с величиной и направлением абсолютной угловой скорости аппарата.
Указанный технический результат достигается тем, что в устройство для контроля пилотажно-навигационного комплекса, содержащее датчик абсолютной угловой скорости аппарата по продольной оси связанной системы координат, выход которого соединен с вычитающим входом первой схемы вычитания, выход которого через первый компаратор соединен с входом логической схемы ИЛИ, датчик угла крена аппарата, выход которого соединен с первым дифференциатором, датчик абсолютной угловой скорости аппарата по нормальной оси связанной системы координат, выход которого соединен с вычитающим входом второй схемы вычитания, выход которой через второй компаратор соединен с входом логической схемы ИЛИ, датчик угла рыскания аппарата, второй дифференциатор, датчик абсолютной угловой скорости аппарата по поперечной оси связанной системы координат, выход которого соединен с вычитающим входом третьей схемы вычитания, выход которой через третий компаратор соединен с входом логической схемы ИЛИ, датчик угла тангажа аппарата, выход которого соединен с третьим дифференциатором, дополнительно введены первый, второй, третий, четвертый преобразователи координат, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой функциональные преобразователи, первый, второй, третий сумматоры, четвертая, пятая схемы вычитания, причем первый вход первого преобразователя координат соединен с выходом первого сумматора, входы которого соединены с выходом датчика угловой скорости Земли пилотажно-навигационного комплекса и выходом четвертого дифференциатора, соединенного с выходом датчика долготы пилотажно-навигационного комплекса, второй и третий входы первого преобразователя координат соединены соответственно с выходами первого и второго функциональных преобразователей, входы которых, как и вход пятого дифференциатора, выход которого соединен с четвертым входом первого преобразователя координат, подключены к выходу датчика широты пилотажно-навигационного комплекса, первый вход второго преобразователя координат соединен со вторым выходом первого преобразователя координат, а второй и третий входы - соответственно с выходами третьего и четвертого функциональных преобразователей, входы которых соединены с выходом четвертой схемы вычитания, входы которой подключены к выходам датчиков курса и рыскания пилотажно-навигационного комплекса, четвертый и пятый входы второго преобразователя координат соединены соответственно с первым и третьим выходами первого преобразователя координат, первый вход третьего преобразователя координат соединен с выходом пятой схемы вычитания, первый вычитающий вход которой через второй дифференциатор соединен с выходом четвертой схемы вычитания, а второй вход - с третьим выходом второго преобразователя координат, второй и третий входы - соответственно с выходами пятого и шестого функциональных преобразователей, входы которых, как и вход третьего дифференциатора, соединены с выходом датчика тангажа пилотажно-навигационного комплекса, четвертый и пятый входы третьего преобразователя координат соединены соответственно со вторым и первым выходами второго преобразователя координат, первый вход четвертого преобразователя координат соединен с выходом второго сумматора, один вход которого соединен с выходом третьего дифференциатора, а другой - с третьим выходом третьего преобразователя координат, второй и третий входы - соответственно с выходами седьмого и восьмого функциональных преобразователей, входы которых соединены с выходом датчика крена пилотажно-навигационного комплекса, четвертый и пятый входы четвертого преобразователя координат соединены соответственно с первым и вторым выходами третьего преобразователя координат, первый выход четвертого преобразователя координат соединен с суммирующим входом второй схемы вычитания, второй выход четвертого преобразователя координат соединен с суммирующим входом третьей схемы вычитания, третий выход четвертого преобразователя координат соединен с третьим сумматором, второй вход которого соединен с выходом первого дифференциатора, а выход - с суммирующим входом первой схемы вычитания.
Указанный технический результат достигается также тем, что в устройстве для контроля пилотажно-навигационного комплекса преобразователь координат содержит последовательно соединенные первый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат и четвертый сумматор, второй вход которого соединен с выходом второго умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные третий умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, шестая схема вычитания, суммирующий вход которой соединен с выходом третьего умножителя, вычитающий вход - с выходом четвертого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами второго и четвертого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - способа и устройства для контроля пилотажно-навигационного комплекса. Технический результат достигается за счет измерения на борту аппарата проекций вектора абсолютной угловой скорости аппарата датчиками абсолютных угловых скоростей по продольной, нормальной и поперечной осям связанной системы координат и сравнения этих проекций с их вычисленными оценками через сумму проекций векторов угловых скоростей Земли, долготы, широты, курса, рыскания, тангажа и крена аппарата, измеренных датчиками контролируемого пилотажно-навигационного комплекса. При появлении существенных отличий суммы этих угловых скоростей от проекций вектора абсолютной угловой скорости аппарата фиксируется отказ пилотажно-навигационного комплекса.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного способа и устройства контроля пилотажно-навигационного комплекса, отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставленнии таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
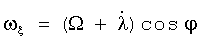
Сущность изобретения поясняется фиг.1, 2, 3, 4.
На фиг.1 изображено положение систем координат, скоростей, углов, угловых скоростей аппарата относительно инерциальной системы координат  и Земли, где приняты следующие обозначения:
и Земли, где приняты следующие обозначения:
- инерциальная, геоцентрическая система координат;
 - геоцентрическая, земная, неподвижная система координат;
- геоцентрическая, земная, неподвижная система координат;
 - геоцентрическая, земная, ориентированная по меридиану места;
- геоцентрическая, земная, ориентированная по меридиану места;
 - неподвижная, горизонтальная, географически ориентированная система координат;
- неподвижная, горизонтальная, географически ориентированная система координат;  направление на север (N);
направление на север (N);  направление на запад (W);
направление на запад (W);
 - ортодромическая система координат;
- ортодромическая система координат;
Ω - угловая скорость вращения Земли;
λ, φ, K - долгота, широта, курс аппарата;
ωξ, ωη, ωξ - угловые скорости перемещения точки места аппарата;
Vξ, Vη, Vζ - линейные скорости перемещения точки места аппарата.
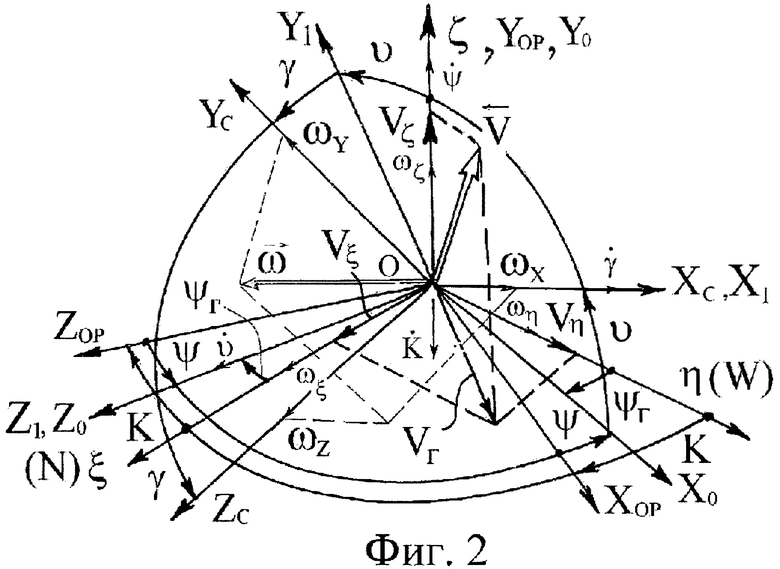
На фиг.2 изображено положение систем координат, скоростей, углов, угловых скоростей аппарата относительно неподвижной, горизонтальной, географически ориентированной системы координат , и приняты следующие обозначения:
 - горизонтальная, земная, неподвижная система координат, ось
- горизонтальная, земная, неподвижная система координат, ось  которой направлена по движению аппарата;
которой направлена по движению аппарата;
 - связанная система координат аппарата;
- связанная система координат аппарата;
 - система координат поворота аппарата на угол υ;
- система координат поворота аппарата на угол υ;
ψ, υ, γ - углы рыскания, тангажа, крена;
 - гироскопический курс;
- гироскопический курс;
 ,
,  ,
,  ,
,  - угловые скорости рыскания, тангажа, крена, курса аппарата;
- угловые скорости рыскания, тангажа, крена, курса аппарата;
ωX, ωY, ωZ - проекции вектора  абсолютной угловой скорости аппарата на оси связанной системы координат.
абсолютной угловой скорости аппарата на оси связанной системы координат.
На фиг.3 приведена структурная схема устройства контроля пилотажно-навигационного комплекса по п.2 формулы, где приняты следующие обозначения:
1-1, 1-2, 1-3 - датчик абсолютной угловой скорости по продольной оси связанной системы координат, датчик абсолютной угловой скорости по нормальной оси связанной система координат, датчик абсолютной угловой скорости по поперечной оси связанной системы координат;
2-1, 2-2, 2-3, 2-4, 2-5 - первая, вторая, третья, четвертая, пятая схемы вычитания;
3-1, 3-2, 3-3 - первый, второй, третий компараторы;
4 - логическая схема ИЛИ;
5 - датчик угла крена аппарата;
6-1, 6-2, 6-3, 6-4, 6-5 - первый, второй, третий, четвертый, пятый дифференциаторы;
7-1, 7-2, 7-3 - первый, второй, третий сумматоры;
8 - датчик угла тангажа;
9 - датчик угла долготы;
10 - датчик угловой скорости Земли;
11-1, 11-2, 11-3, 11-4 - первый, второй, третий, четвертый преобразователи координат;
12 - датчик угла широты;
13-1, 13-2, 13-3, 13-4, 13-5, 13-6, 13-7, 13-8 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой функциональные преобразователи;
14 - датчик угла курса.
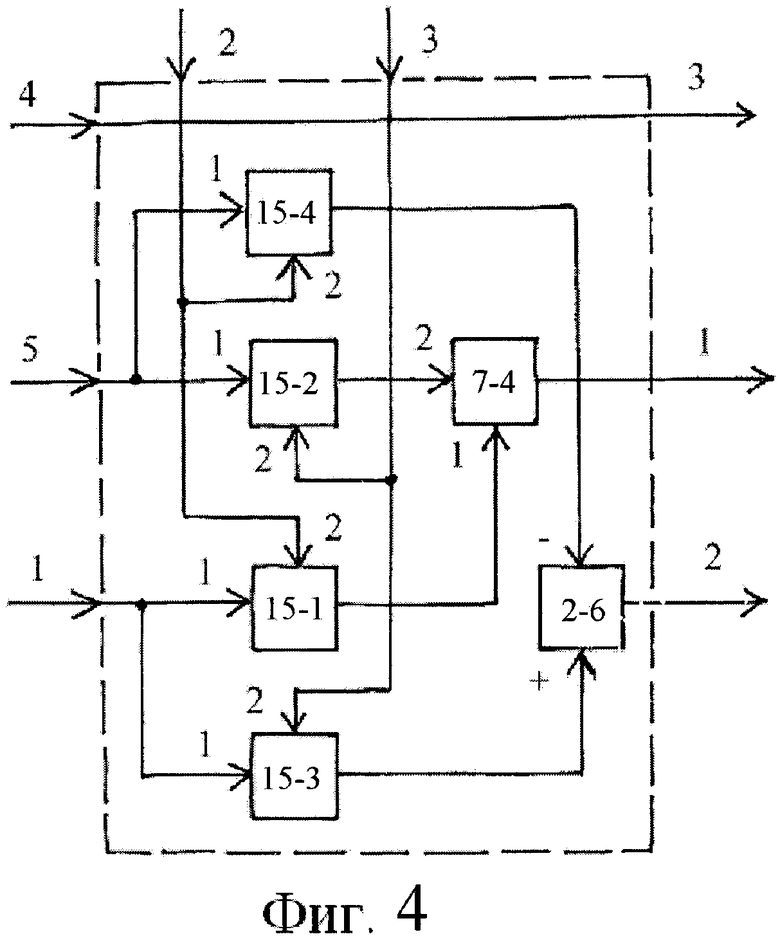
На фиг.4 приведена структурная схема преобразователя координат по п.3 формулы, где приняты следующие обозначения:
2-6 - шестая схема вычитания;
7-4 - четвертый сумматор;
15-1, 15-2, 15-3, 15-4 - первый, второй, третий, четвертый умножители.
Сущность способа контроля пилотажно-навигационного комплекса поясняется чертежами (фиг.1, 2) и состоит в сравнении величины и направления измеренного вектора  абсолютной угловой скорости аппарата и его оценки
абсолютной угловой скорости аппарата и его оценки  полученной по сигналам датчиков проверяемого комплекса. Контроль ведется как на предполетном, так и полетном этапах работы комплекса и включает сравнение проекций ωX, ωY, ωZ, измеренного вектора абсолютной угловой скорости, и их вычисленных значений
полученной по сигналам датчиков проверяемого комплекса. Контроль ведется как на предполетном, так и полетном этапах работы комплекса и включает сравнение проекций ωX, ωY, ωZ, измеренного вектора абсолютной угловой скорости, и их вычисленных значений  ,
,  ,
,  по сигналам датчиков угловой скорости Земли Ω, долготы λ, широты φ, курса K, рыскания ψ, тангажа
по сигналам датчиков угловой скорости Земли Ω, долготы λ, широты φ, курса K, рыскания ψ, тангажа  и крена γ аппарата. Векторное уравнение кинематики углового движения аппарата в инерциальном пространстве имеет вид
и крена γ аппарата. Векторное уравнение кинематики углового движения аппарата в инерциальном пространстве имеет вид

где Ω - величина вектора абсолютной угловой скорости вращения Земли, относительно "неподвижных" звезд, угл.град./с;  - величина вектора относительной угловой скорости аппарата по долготе, изменяющейся относительно нулевого меридиана, угл.град./с;
- величина вектора относительной угловой скорости аппарата по долготе, изменяющейся относительно нулевого меридиана, угл.град./с;  - величина вектора относительной угловой скорости аппарата по широте, изменяющейся относительно плоскости экватора, угл.град./с;
- величина вектора относительной угловой скорости аппарата по широте, изменяющейся относительно плоскости экватора, угл.град./с;  - величина вектора относительной угловой скорости аппарата по курсу, в плоскости горизонта, относительно направления на Север, положительное направление - по часовой стрелке, угл.град./с;
- величина вектора относительной угловой скорости аппарата по курсу, в плоскости горизонта, относительно направления на Север, положительное направление - по часовой стрелке, угл.град./с;  - величина вектора относительной угловой скорости рыскания аппарата, в плоскости горизонта, относительно заданного курса, положительное направление - против часовой стрелки, угл.град./с;
- величина вектора относительной угловой скорости рыскания аппарата, в плоскости горизонта, относительно заданного курса, положительное направление - против часовой стрелки, угл.град./с;  - величина вектора относительной угловой скорости тангажа аппарата, отклонения от плоскости горизонта, положительное направление - против часовой стрелки, угл.град./с;
- величина вектора относительной угловой скорости тангажа аппарата, отклонения от плоскости горизонта, положительное направление - против часовой стрелки, угл.град./с;  - величина вектора относительной угловой скорости крена аппарата, отклонения от плоскости горизонта, положительное направление - против часовой стрелки, угл.град./с;
- величина вектора относительной угловой скорости крена аппарата, отклонения от плоскости горизонта, положительное направление - против часовой стрелки, угл.град./с;  - вектор угловой скорости Земли в геоцентрической земной системе координат
- вектор угловой скорости Земли в геоцентрической земной системе координат  , плоскость
, плоскость  которой находится в плоскости нулевого меридиана (фиг.1);
которой находится в плоскости нулевого меридиана (фиг.1);  - вектор относительной угловой скорости аппарата в геоцентрической земной неподвижной системе координат
- вектор относительной угловой скорости аппарата в геоцентрической земной неподвижной системе координат  , плоскость
, плоскость  которой расположена в плоскости меридиана места аппарата;
которой расположена в плоскости меридиана места аппарата;  - вектор относительной угловой скорости аппарата в горизонтальной, географически ориентированной системе координатор , ось ξ которой ориентирована на Север, a η - на Запад. Тогда проекции абсолютной угловой скорости аппарата из-за его перемещения Vξ, Vη относительно Земли в системе координат могут быть определены соотношением [8, с.71]
- вектор относительной угловой скорости аппарата в горизонтальной, географически ориентированной системе координатор , ось ξ которой ориентирована на Север, a η - на Запад. Тогда проекции абсолютной угловой скорости аппарата из-за его перемещения Vξ, Vη относительно Земли в системе координат могут быть определены соотношением [8, с.71]  или в проекциях векторов:
или в проекциях векторов:

где проекции угловых скоростей инерциальной системы координат очевидно  , а матрицы преобразований систем координат, определяющие направления векторов
, а матрицы преобразований систем координат, определяющие направления векторов  ,
,  ,
,  , имеют вид:
, имеют вид:
 ;
;  ;
; 
 ;
;  ;
; 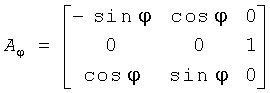 .
.
После преобразований (4) имеем окончательное выражение

Проекции относительной угловой скорости в связанных осях аппарата по отношению к неподвижной горизонтальной географически ориентированной системе координат имеют вид (фиг.2)


где матрицы элементарных поворотов, определяющие направления векторов  ,
,  ,
,  ,
,  ,
,  имеют вид:
имеют вид:
 ;
;  ;
;
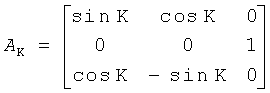 ;
; 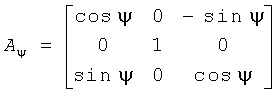 ;
; 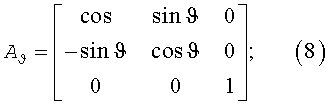
 ;
;  ;
;  ;
;
 ;
; 
Преобразовав (7), учитывая (3) и (6), получаем соотношения для контроля пилотажно-навигационного комплекса
 ;
;

где Фi,  - функции точности контроля и пороги срабатывания компараторов;
- функции точности контроля и пороги срабатывания компараторов;  - выходной сигнал i-того компаратора. Выходной сигнал всего устройства UO=UK1∨UK2∨UK3 - дизъюнкция сигналов сравнения трех функций точности контроля и порогов срабатывания компараторов.
- выходной сигнал i-того компаратора. Выходной сигнал всего устройства UO=UK1∨UK2∨UK3 - дизъюнкция сигналов сравнения трех функций точности контроля и порогов срабатывания компараторов.
Способ контроля пилотажно-навигационного комплекса по п.1 формулы осуществляют следующим образом. Одновременно измеряют величину и направление вектора  абсолютной угловой скорости аппарата и производят его сравнение с оценкой
абсолютной угловой скорости аппарата и производят его сравнение с оценкой  этого вектора, вычисленной с помощью сигналов Ω, λ, φ, ψ, K, ϑ, γ пилотажно-навигационного комплекса. Для этого производится суммирование неизменно ориентированного и известного вектора абсолютной угловой скорости
этого вектора, вычисленной с помощью сигналов Ω, λ, φ, ψ, K, ϑ, γ пилотажно-навигационного комплекса. Для этого производится суммирование неизменно ориентированного и известного вектора абсолютной угловой скорости  Земли с относительными угловыми скоростями
Земли с относительными угловыми скоростями  ,
,  ,
,  ,
,  ,
,  ,
,  при известной взаимной ориентации векторов
при известной взаимной ориентации векторов  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . Суммирование ведется путем последовательного определения абсолютных угловых скоростей ωξ, ωη, ωζ системы координат , угловых скоростей ωX0, ωY0, ωZ0, системы координат OX0Y0Z0, угловых скоростей ωX1, ωY1, ωZ1 системы координат OX1Y1Z1 и наконец оценок , , абсолютных угловых скоростей в связанной системе координат. Соответствующие выражениям (5), (8), (9) вычисления проекций ведутся на унифицированных схемах преобразователей координат 11-1, 11-2, 11-3, 11-4. Сигналы, поступившие на первый и второй входы преобразователей координат, перемножаются в умножителе 15-1, как и сигналы, поступившие на третий и пятый входы, перемножаются в умножителе 15-2, суммируются на сумматоре 7-4, а затем поступают на первый выход преобразователя координат. Сигнал, поступивший на четвертый вход преобразователя координат, без преобразования поступает на его третий выход. Сигналы, поступившие на первый и третий входы преобразователей координат, перемножаются в умножителе 15-3, как и сигналы, поступившие на второй и пятый входы, перемножаются в умножителе 15-4, вычитаются на схеме 2-6 вычитания, а затем поступают на второй выход преобразователя координат. Если учесть, что на вторые входы преобразователей 11-1, 11-2, 11-3, 11-4 координат с функциональных преобразователей 13-1, 13-3, 13-5, 13-7 поступают преобразованные по функции sin их входные сигналы, а на третьи входы преобразователей 11-1, 11-2, 11-3, 11-4 координат с функциональных преобразователей 13-2, 13-4, 13-6, 13-8 поступают преобразованные по функции cos их входные сигналы, то можно представить следующее общее соотношение для входных и выходных сигналов
. Суммирование ведется путем последовательного определения абсолютных угловых скоростей ωξ, ωη, ωζ системы координат , угловых скоростей ωX0, ωY0, ωZ0, системы координат OX0Y0Z0, угловых скоростей ωX1, ωY1, ωZ1 системы координат OX1Y1Z1 и наконец оценок , , абсолютных угловых скоростей в связанной системе координат. Соответствующие выражениям (5), (8), (9) вычисления проекций ведутся на унифицированных схемах преобразователей координат 11-1, 11-2, 11-3, 11-4. Сигналы, поступившие на первый и второй входы преобразователей координат, перемножаются в умножителе 15-1, как и сигналы, поступившие на третий и пятый входы, перемножаются в умножителе 15-2, суммируются на сумматоре 7-4, а затем поступают на первый выход преобразователя координат. Сигнал, поступивший на четвертый вход преобразователя координат, без преобразования поступает на его третий выход. Сигналы, поступившие на первый и третий входы преобразователей координат, перемножаются в умножителе 15-3, как и сигналы, поступившие на второй и пятый входы, перемножаются в умножителе 15-4, вычитаются на схеме 2-6 вычитания, а затем поступают на второй выход преобразователя координат. Если учесть, что на вторые входы преобразователей 11-1, 11-2, 11-3, 11-4 координат с функциональных преобразователей 13-1, 13-3, 13-5, 13-7 поступают преобразованные по функции sin их входные сигналы, а на третьи входы преобразователей 11-1, 11-2, 11-3, 11-4 координат с функциональных преобразователей 13-2, 13-4, 13-6, 13-8 поступают преобразованные по функции cos их входные сигналы, то можно представить следующее общее соотношение для входных и выходных сигналов
 ;
;  ;
; 
где Xi,  - входные сигналы; Yj,
- входные сигналы; Yj,  - выходные сигналы преобразователей координат. Преобразователь 11-1 координат реализует матрицу поворота Аφ выражения (5). Преобразователь 11-2 координат реализует матрицу поворота
- выходные сигналы преобразователей координат. Преобразователь 11-1 координат реализует матрицу поворота Аφ выражения (5). Преобразователь 11-2 координат реализует матрицу поворота  выражения (9). Преобразователь 11-3 координат реализует матрицу поворота Аϑ выражения (8). Преобразователь 11-4 координат реализует матрицу поворота Аγ выражения (9). На выходе сумматора 7-1 получается сигнал оценки
выражения (9). Преобразователь 11-3 координат реализует матрицу поворота Аϑ выражения (8). Преобразователь 11-4 координат реализует матрицу поворота Аγ выражения (9). На выходе сумматора 7-1 получается сигнал оценки  , на первом выходе преобразователя 11-4 координат получается сигнал оценки
, на первом выходе преобразователя 11-4 координат получается сигнал оценки  , а на втором выходе преобразователя 11-4 координат получается сигнал оценки . Они поступают соответственно на суммирующие входы схем 2-1, 2-2, 2-3 вычитания, на вычитающие входы которых одновременно поступают выходные сигналы соответственно датчиков 1-1, 1-2, 1-3 абсолютных угловых скоростей ωX, ωY, ωZ аппарата. Поскольку датчики контролируемого пилотажно-навигационного комплекса имеют погрешности, как и само устройство контроля, то для фиксации отказа разности оценок , , и ωX, ωY, ωZ сравниваются в компараторах 3-1, 3-2, 3-3 с порогами, в соответствии с выражением (10). Отказ пилотажно-навигационного комплекса приводит к нарушению векторного соотношения (3) и выходу за пределы поля допуска
, а на втором выходе преобразователя 11-4 координат получается сигнал оценки . Они поступают соответственно на суммирующие входы схем 2-1, 2-2, 2-3 вычитания, на вычитающие входы которых одновременно поступают выходные сигналы соответственно датчиков 1-1, 1-2, 1-3 абсолютных угловых скоростей ωX, ωY, ωZ аппарата. Поскольку датчики контролируемого пилотажно-навигационного комплекса имеют погрешности, как и само устройство контроля, то для фиксации отказа разности оценок , , и ωX, ωY, ωZ сравниваются в компараторах 3-1, 3-2, 3-3 с порогами, в соответствии с выражением (10). Отказ пилотажно-навигационного комплекса приводит к нарушению векторного соотношения (3) и выходу за пределы поля допуска  ,
,  одной или нескольких функций Фi;
одной или нескольких функций Фi;  контроля в (10).
контроля в (10).
Смысл изобретения состоит в создании простого, аппаратурно-безызбыточного, полностью автономного способа контроля многопараметрического пилотажно-навигационного комплекса, который учитывает соотношение между абсолютным и относительным угловыми движениями аппарата (3). Устройство содержит простейшие операции переработки проверяемой информации - параметров Ω, λ, φ, K, ψ, ϑ, γ измеренного в комплексе относительного движения и параметров ωX, ωY, ωZ абсолютного движения аппарата, в полетном и предполетном режимах работы. Способ включает только безынерционные кинематические преобразования параметров. Он обладает широкой общностью применения для различных практических реализаций датчиков комплекса и аппаратов. Для этого выбраны типовые навигационные системы отсчета координат (фиг.1, 2) и кинематические соотношения параметров. Местоположение аппарата определено в географической системе координат, что характерно для большенства навигационных устройств и подвижных объектов. Целесообразность создания способа определяется и качественным ростом технических характеристик датчиков и широкими диапазонами изменения параметров полета современных аппаратов. Это в наибольшей степени относится к датчикам 1-1, 1-2, 1-3 абсолютных угловых скоростей, которые измеряют величину и направление вектора угловой скорости аппарата в инерциальном пространстве. Не оговаривая физический принцип их работы, можно только отметить, что порог их чувствительности должен быть меньше угловой скорости Земли и угловых скоростей  ,
,  изменения долготы и широты аппарата [9]. При этом диапазон измерения угловой скорости должен включать максимальные значения пилотажных параметров
изменения долготы и широты аппарата [9]. При этом диапазон измерения угловой скорости должен включать максимальные значения пилотажных параметров  ,
,  ,
,  аппарата. Указанным принципиальным условиям отвечают множество типов современных датчиков угловых скоростей лазерного, вибрационного, волоконно-оптического, твердотельного типа [9; 10, с.182-228; 11, с.102]. Весьма широк и возможный перечень датчиков контролируемых навигационных параметров λ и φ, которые могут быть реализованы по принципу работы аэрометрической и доплеровской систем счисления пути [9, с.278-288, 305-308], астроориентатора [9, с.479], спутниковой навигационной системы [12], инерциальной навигационной системы [9, с.389-396]. В любом из указанных вариантов комплектации контролируемого комплекса результирующая надежность его аппаратных средств будет много меньше надежности проверяющего устройства - бортовой цифровой вычислительной машины (БЦВМ), где предпочтительна реализация контроля. Следовательно, вероятность обнаружения отказа именно пилотажно-навигационного комплекса, при фиксации отказа соответствующим устройством (10), имеет наибольшую достоверность [13, с.87]. При этом смысл изобретения состоит в повышении широты охвата контролем всех датчиков проверяемого комплекса, что технически осуществлено в заявляемом устройстве.
аппарата. Указанным принципиальным условиям отвечают множество типов современных датчиков угловых скоростей лазерного, вибрационного, волоконно-оптического, твердотельного типа [9; 10, с.182-228; 11, с.102]. Весьма широк и возможный перечень датчиков контролируемых навигационных параметров λ и φ, которые могут быть реализованы по принципу работы аэрометрической и доплеровской систем счисления пути [9, с.278-288, 305-308], астроориентатора [9, с.479], спутниковой навигационной системы [12], инерциальной навигационной системы [9, с.389-396]. В любом из указанных вариантов комплектации контролируемого комплекса результирующая надежность его аппаратных средств будет много меньше надежности проверяющего устройства - бортовой цифровой вычислительной машины (БЦВМ), где предпочтительна реализация контроля. Следовательно, вероятность обнаружения отказа именно пилотажно-навигационного комплекса, при фиксации отказа соответствующим устройством (10), имеет наибольшую достоверность [13, с.87]. При этом смысл изобретения состоит в повышении широты охвата контролем всех датчиков проверяемого комплекса, что технически осуществлено в заявляемом устройстве.
Устройство для контроля пилотажно-навигационного комплекса (фиг.3) содержит датчик 1-1 абсолютной угловой скорости по продольной оси связанной системы координат, датчик 1-2 абсолютной угловой скорости по нормальной оси связанной системы координат и датчик 1-3 абсолютной угловой скорости по поперечной оси связанной системы координат аппарата. Выход датчика 1-1 абсолютной угловой скорости по продольной оси связанной системы координат соединен с вычитающим входом схемы 2-1 вычитания, выход которой через компаратор 3-1 соединен с входом логической схемы 4 ИЛИ. Датчик 5 угла крена аппарата через последовательно соединенные дифференциатор 6-1 и сумматор 7-1 подключен к суммирующему входу схемы 2-1 вычитания. Выход датчика 1-2 абсолютной угловой скорости по нормальной оси связанной системы координат соединен с вычитающим входом схемы 2-2 вычитания, выход которой через компаратор 3-2 соединен с входом логической схемы 4 ИЛИ. Датчик 6 угла рыскания аппарата через последовательно соединенные схему 2-3 вычитания и дифференциатор 6-2 соединен с вычитающим входом схемы 2-4 вычитания. Выход датчика 1-3 абсолютной угловой скорости по поперечной оси связанной системы координат соединен с вычитающим входом схемы 2-5 вычитания, выход которой через компаратор 3-3 соединен с входом логической схемы 4 ИЛИ. Датчик 8 угла тангажа аппарата через дифференциатор 6-3 соединен с входом сумматора 7-2. Датчик 9 угла долготы аппарата через последовательно соединенные дифференциатор 6-4, сумматор 7-3, второй вход которого соединен с выходом датчика 10 угловой скорости Земли, соединен с первым входом преобразователя 11-1 координат. Датчик 12 угла широты аппарата через функциональные преобразователи 13-1, 13-2 и дифференциатор 6-5 соединен соответственно со вторым, третьим и четвертым входами преобразователя 11-1 координат. Датчик 14 угла курса аппарата через схему 2-3 вычитания соединен с входами функциональных преобразователей 13-3, 13-4, выходы которых соединены соответственно со вторым и третьим входами преобразователя 11-2 координат, первый вход которого соединен со вторым выходом преобразователя 11-1 координат, четвертый вход - с первым выходом преобразователя 11-1 координат, пятый вход - с третьим выходом преобразователя 11-1 координат. Датчик 8 тангажа аппарата через функциональный преобразователи 13-5, 13-6 соединен соответственно со вторым и третьим входами преобразователя 11-3 координат, первый вход которого соединен с выходом схемы 2-4 вычитания, суммирующий вход которой соединен с третьим выходом преобразователя 11-2 координат, четвертый вход преобразователя 11-3 соединен со вторым выходом преобразователя 11-2 координат, а пятый вход - с первым выходом преобразователя 11-2 координат. Датчик 5 угла крена аппарата через функциональные преобразователи 13-7, 13-8 соединен соответственно со вторым и третьим входами преобразователя 11-4 координат, первый вход которого соединен с выходом сумматора 7-2, вход которого соединен с третьим выходом преобразователя 11-3 координат, четвертый вход преобразователя 11-4 координат соединен с первым выходом преобразователя 11-3 координат, а пятый вход - со вторым выходом преобразователя 11-3 координат. Первый выход преобразователя 11-4 координат соединен с суммирующим входом схемы 2-2 вычитания, второй выход - с суммирующим входом схемы 2-5 вычитания, а выход - с входом сумматора 7-1. Выход логической схемы 4 ИЛИ является выходом устройства.
Преобразователь 11-1, 11-2, 11-3, 11-4 координат (фиг.4) содержит последовательно соединенные умножитель 15-1, первый вход которого соединен с первым входом преобразователя 11-1, 11-2, 11-3, 11-4 координат, второй вход - со вторым входом преобразователя 11-1, 11-2, 11-3, 11-4 координат, и сумматор 7-4, второй вход которого соединен с выходом умножителя 15-2, а выход - с первым выходом преобразователя 11-1, 11-2, 11-3, 11-4 координат. Последовательно соединены умножитель 15-3, первый вход которого соединен с первым входом преобразователя 11-1, 11-2, 11-3, 11-4 координат, второй вход - с третьим входом преобразователя 11-1, 11-2, 11-3, 11-4 координат, схема 2-6 вычитания, суммирующий вход которой соединен с выходом умножителя 15-3, вычитающий вход - с выходом умножителя 15-4, а выход - со вторым выходом преобразователя 11-1, 11-2, 11-3, 11-4 координат. Четвертый вход преобразователя 11-1, 11-2, 11-3, 11-4 координат соединен с его третьим выходом, пятый вход - с первыми входами умножителей 15-2, 15-4, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя 11-1, 11-2, 11-3, 11-4 координат.
Устройство контроля пилотажно-навигационного комплекса по п.2 формулы (фиг.3) работает следующим образом. Сигнал, пропорциональный долготе λ местоположения аппарата, с датчика 9 угла долготы через дифференциатор 6-4 поступает на вход сумматора 7-3, где он суммируется с сигналом Ω, пропорциональным угловой скорости Земли, с датчика 10 угловой скорости Земли. Выходной сигнал сумматора 7-3, пропорциональный  , поступает на первый вход преобразователя 11-1 координат, на второй, третий и четвертый входы которого поступают соответственно сигналы с выходов первого, второго функциональных преобразователей 13-1, 13-2 и дифференциатора 6-5, подключенных к выходу датчика 12 угла широты φ местоположения аппарата. В результате на первом, втором и третьем выходах преобразователя 11-1 координат получаются соответственно сигналы, пропорциональные
, поступает на первый вход преобразователя 11-1 координат, на второй, третий и четвертый входы которого поступают соответственно сигналы с выходов первого, второго функциональных преобразователей 13-1, 13-2 и дифференциатора 6-5, подключенных к выходу датчика 12 угла широты φ местоположения аппарата. В результате на первом, втором и третьем выходах преобразователя 11-1 координат получаются соответственно сигналы, пропорциональные  ;
;  ;
;  . На первый вход преобразователя 11-2 координат поступает сигнал, пропорциональный
. На первый вход преобразователя 11-2 координат поступает сигнал, пропорциональный  , на второй и третий входы поступают соответственно сигналы, пропорциональные sin и cos угла ψГ гироскопического курса с выхода схемы 2-3 вычитания, на входы которой приходят сигналы датчиков 14 курса K и датчика 6 угла ψ рыскания. На четвертый и пятый входы преобразователя 11-2 координат поступают сигналы, пропорциональные
, на второй и третий входы поступают соответственно сигналы, пропорциональные sin и cos угла ψГ гироскопического курса с выхода схемы 2-3 вычитания, на входы которой приходят сигналы датчиков 14 курса K и датчика 6 угла ψ рыскания. На четвертый и пятый входы преобразователя 11-2 координат поступают сигналы, пропорциональные  и
и  соответственно с первого и третьего выходов преобразователя 11-1 координат. На первом выходе преобразователя 11-2 координат получается сигнал, пропорциональный ωX0, втором выходе - пропорциональный ωZ0. Выходной сигнал с третьего выхода преобразователя 11-2 координат поступает на один вход схемы 2-4 вычитания, на другой вход которой через дифференциатор 6-2 поступает сигнал, пропорциональный -
соответственно с первого и третьего выходов преобразователя 11-1 координат. На первом выходе преобразователя 11-2 координат получается сигнал, пропорциональный ωX0, втором выходе - пропорциональный ωZ0. Выходной сигнал с третьего выхода преобразователя 11-2 координат поступает на один вход схемы 2-4 вычитания, на другой вход которой через дифференциатор 6-2 поступает сигнал, пропорциональный -  .
.
Это обеспечивает получение на ее выходе сигнала, пропорционального ωY0. Таким образом на первом и втором выходах преобразователя 11-2 координат и схемы 2-4 вычитания получаются сигналы, пропорциональные проекциям угловой скорости на оси горизонтальной земной неподвижной системы координат OXOYOZO. На первый вход преобразователя 11-3 координат поступает сигнал, пропорциональный ωY0, на второй и третий входы поступают соответственно сигналы, пропорциональные sin и cos угла ϑ тангажа с функциональных преобразователей 13-5, 13-6, на входы которых приходят сигналы датчика 8 тангажа. На четвертый и пятый входы преобразователя 11-3 координат поступают сигналы, пропорциональные ωZ0 и ωX0 соответственно со второго и первого выходов преобразователя 11-2 координат. На первом выходе преобразователя 11-3 координат получается сигнал, пропорциональный ωX1, втором выходе - пропорциональный ωY1. Выходной сигнал с третьего выхода преобразователя 11-3 координат поступает на вход сумматора 7-2, на другой вход которого через дифференциатор 6-3 поступает сигнал, пропорциональный  . Это обеспечивает получение на ее выходе сигнала, пропорционального ωZ1. Таким образом на первом и втором выходах преобразователя 11-3 координат и сумматора 7-2 получаются сигналы, пропорциональные проекциям угловой скорости на оси подвижной системы координат OX1Y1Z1. На первый вход преобразователя 11-4 координат поступает сигнал, пропорциональный ωZ1, на второй и третий входы - поступают соответственно сигналы, пропорциональные sin и cos угла γ крена с выходов соответственно функциональных преобразователей 13-7, 13-8, на входы которых приходят сигналы датчика угла γ крена. На четвертый и пятый входы преобразователя 11-4 координат поступают сигналы, пропорциональные ωX1 и ωY1 соответственно с первого и третьего выходов преобразователя 11-3 координат. На первом выходе преобразователя 11-4 координат получается сигнал, пропорциональный
. Это обеспечивает получение на ее выходе сигнала, пропорционального ωZ1. Таким образом на первом и втором выходах преобразователя 11-3 координат и сумматора 7-2 получаются сигналы, пропорциональные проекциям угловой скорости на оси подвижной системы координат OX1Y1Z1. На первый вход преобразователя 11-4 координат поступает сигнал, пропорциональный ωZ1, на второй и третий входы - поступают соответственно сигналы, пропорциональные sin и cos угла γ крена с выходов соответственно функциональных преобразователей 13-7, 13-8, на входы которых приходят сигналы датчика угла γ крена. На четвертый и пятый входы преобразователя 11-4 координат поступают сигналы, пропорциональные ωX1 и ωY1 соответственно с первого и третьего выходов преобразователя 11-3 координат. На первом выходе преобразователя 11-4 координат получается сигнал, пропорциональный  , на втором выходе - пропорциональный
, на втором выходе - пропорциональный  . Выходной сигнал с третьего выхода преобразователя 11-4 координат поступает на один вход сумматора 7-1, на другой вход которого через дифференциатор 6-1 поступает сигнал, пропорциональный
. Выходной сигнал с третьего выхода преобразователя 11-4 координат поступает на один вход сумматора 7-1, на другой вход которого через дифференциатор 6-1 поступает сигнал, пропорциональный  . Это обеспечивает получение на его выходе сигнала, пропорционального
. Это обеспечивает получение на его выходе сигнала, пропорционального  . Таким образом на первом и втором выходах преобразователя 11-4 координат и сумматора 7-1 получаются сигналы, пропорциональные оценкам проекций абсолютной угловой скорости аппарата на оси связанной системы координат OXCYCZC. Схемы 2-1, 2-2, 2-5 вычитания соответственно определяют разности сигналов:
. Таким образом на первом и втором выходах преобразователя 11-4 координат и сумматора 7-1 получаются сигналы, пропорциональные оценкам проекций абсолютной угловой скорости аппарата на оси связанной системы координат OXCYCZC. Схемы 2-1, 2-2, 2-5 вычитания соответственно определяют разности сигналов:  ,
,  ,
,  , которые в последующем поступают на компараторы 3-1, 3-2, 3-3 и далее на логическую схему ИЛИ. При различии этих сигналов более порогов
, которые в последующем поступают на компараторы 3-1, 3-2, 3-3 и далее на логическую схему ИЛИ. При различии этих сигналов более порогов  компараторов, на выходе или выходах последних появляется сигнал отказа контролируемого пилотажно-навигационного комплекса.
компараторов, на выходе или выходах последних появляется сигнал отказа контролируемого пилотажно-навигационного комплекса.
Преобразователь 11-1, 11-2, 11-3, 11-4 координат по п.3 формулы (фиг.4) работает следующим образом. Поскольку преобразователь 11-1, 11-2, 11-3, 11-4 реализует соотношения (11) между его входными: Х1, Х2, Х3, Х4, Х5 и выходными: Y1, Y2, Y3 сигналами, то на выходе преобразователя 11-1 координат будут сигналы, пропорциональные

на выходе преобразователя 11-2 координат и схемы 2-4 вычитания будут сигналы, пропорциональные

на выходе преобразователя 11-3 координат и сумматора 7-2 будут сигналы, пропорциональные

а на выходе преобразователя 11-4 координат и сумматора 7-1 будут сигналы, пропорциональные

Таким образом получаются оценки абсолютной угловой скорости аппарата, сравниваемые с измеренными значениями датчиков 1-1, 1-2, 1-3 абсолютных угловых скоростей.
Практическая реализация способа и устройства контроля пилотажно-навигационного комплекса аппарата возможна на аналоговой и цифровой схемотехнической базе [14-16]. Контролируемый комплекс, в котором определяются параметры долготы λ, широты φ, курса K, рыскания ψ, тангажа ϑ, крена γ, проекции абсолютной угловой скорости на продольную ось ωX, проекции абсолютной угловой скорости на нормальную ось ωY, проекции абсолютной угловой скорости на поперечную ось ωZ аппарата может быть построен с высокой степенью интеграции измерителей на базе инерциальных систем типа ИКВ-802, ИКВ-72, И-11, И-21, ИКВ-1, И-42, СБКВ, ЛИНС-2000, БИНС-85 и др., ИБД-42, ДУС-500, ДУС-700, ДУСв-5, ИИБ, ГЛ-2 и др. Возможен также контроль и комплексов с низкой степенью интеграции измерителей, состоящих например из спутниковой навигационной системы (СНС) типа 1К-161, А-737, СН-3301 или астроориентатора (АО) типа БЦ-63, курсовой системы (КС) типа МКС-1, КС-8, Ц-050, Гребень, построителя вертикали (ПВ) типа МГВ-4, МГВ-1, АГБ-98, АГР-29, блока датчиков угловых скоростей типа КИНД05, ПИКВ05, Гранат-1, ГВК-10 и др. [16], установленных на самолетах, космических аппаратах, кораблях и других подвижных, маневренных объектах. При этом предпочтительная реализация устройства контроля возможна программными средствами на БЦВМ 80-30301, БЦВМ 80-40ХХХ, БЦВМ 90-50ХХХ, БЦВМ 90-60ХХХ и др. [16].
Таким образом, в соответствии с полным учетом пространственного движения аппарата при получении выражения (10), для заявляемого способа и устройства контроля отсутствуют погрешности (1) прототипа. Устройство контролирует широту и долготу аппарата при его произвольном пространственном движении. Оно обладает наибольшей информационной производительностью I=3,992 бит/с. Достоверность контроля пилотажно-навигационного комплекса высокой степени интеграции измерителей на ИКВ-802, ИБД-42 и БЦВМ 80-30301 составляет РД.ИКВ-802=0,977451 на 2 часа полета, то есть время достоверного контроля ТД.ИКВ-802=87,7 час. Это много больше рассматриваемого среднего времени полета t=2 час. В отличии от варианта избыточного контроля с мажоритарными блоками, когда время достоверного контроля только ТД1=3,8 час, здесь при минимальном весе, габаритах, энергопотреблении, стоимости аппаратных средств комплекса время его достоверного обнаружения отказа в 23 раза больше. В предполетном состоянии устройство осуществляет самоконтроль исправности за счет измерения угловой скорости вращения Земли. Достоверность контроля пилотажно-навигационного комплекса на бесплатформенной И-42, ИБД-42 и БЦВМ 80-30301 составляет РД.И-42=0,926615, ТД.И-42=26,2 час, что также указывает на эффективность предлагаемого устройства. Стоимость пилотажно-навигационного комплекса с инерциальными навигационными системами для легкого, маневренного и беспилотного аппарата сравнительно велика, поэтому представляется важным дать оценку эффективности предлагаемого устройства и для варианта комплекса с низкой степенью интеграции. Достоверность контроля комплекса, содержащего СНС 1К-161 (λ,φ), курсовую систему МКС-1 (К,ψ), построитель вертикали МГВ-4 (ϑ,γ), блок датчиков угловых скоростей ИБД-42 (ωX, ωY, ωZ) составляет РД.ПНК=0,99505, ТД.ПНК=403 часа. Это значение много больше среднего времени полета t=2 час и среднего времени наработки на отказ проверяемого комплекса ТПНК=90,6 час. С учетом малой массы GПНК=8,05 кг, габаритов VПНК=8699 см3, энергопотребления ЭПНК=44 Вт, это указывает на высокую эффективность системы и ее встроенного контроля.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в авиационной и космической технике и, в частности, для комплексного контроля пилотажно-навигационных комплексов беспилотных, пассажирских и транспортных самолетов. Оно может использоваться для определения исправности самолета в полете и на стадии его предполетной проверки;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. 506 с.
2. Вульфов А. Широкофюзеляжные "ИЛЫ" // Авиация и космонавтика, №1, 2, 2002.
3. Сейдж Э.П., Уайт Ч.С. Оптимальное управление системами. - М.: Радио и связь, 1982. 392 с.
4. Дмитриев С.П., Колесов Н.В., Осипов А.В. Информационная надежность, контроль и диагностика навигационных систем. - СПб.: ГНЦ РФ-ЦНИИ Электроприбор, 2003. 207 с.
5. Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: Машиностроение, 1979. 352 с.
6. Нейрокомпьютеры в космической технике / Под ред. В.В.Ефимова. Кн.17. - М.: Радиотехника, 2004. 302 с.
7. Белогородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972. 352 с.
8. Березкин Е.Н. Курс теоретической механики. - М.: Изд.МГУ, 1974. 646 с.
9. Селезнев В.П. Навигационные устройства. - М.: Машиностроение, 1974, 600 с.
10. Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов / Под ред. В.Г.Пешехонова. - СПб.: ГНЦ РФ-ЦНИИ "Электроприбор", 2003. 390 с.
11. Дэвид Линч. Взгляд компании "Нортроп Грумман" на развитие навигационных технологий // Гироскопия и навигация. 2008. №3. С.102-106.
12. Глобальная спутниковая радионавигационная система ГЛОНАСС/ Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998. 400 с.
13. Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. - М.: Советское радио, 1969. 176 с.
14. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С.В.Якубовский, Н.А.Барканов, Л.И.Ниссельсон и др. / Под ред. С.В.Якубовского. - М.: Радио и связь, 1984 г., с.432.
15. Смолов В.Б. Функциональные преобразователи информации. - Л.: Энергоиздат, 1981. с.248.
16. Авионика России. Энциклопедический справочник. / Под ред. С.Д.Бодрунова. - СПб.: Национальная Ассоциация авиаприборостроителей, 1999, 780 с.
Данная группа изобретений относится к области комплексного контроля пилотажно-навигационного комплекса систем управления летательными аппаратами и в частности к средствам аппаратурно-безызбыточного контроля ориентации и навигации беспилотных и дистанционно пилотируемых летательных аппаратов, минимального веса, габаритов, энергопотребления, сложности и стоимости. Технический результат заключается в повышении достоверности обнаружения отказа летательного аппарарата, информационной производительности, точности контроля параметров. Он достигается тем, что способ контроля состоит в одновременном измерении и сравнении абсолютной угловой скорости аппарата датчиками угловых скоростей и датчиками относительных скоростей комплекса. Устройство содержит сумматоры, схемы вычитания, функциональные преобразователи, преобразователи координат и компараторы, соединенные так, что выходные сигналы блока датчиков абсолютных угловых скоростей аппарата сравниваются с оценками этих скоростей, вычисленными по сигналам датчиков широты, долготы, курса, рыскания, крена, тангажа комплекса. Отличие оценок угловых скоростей от их измеренных значений на компараторах устройства служит для фиксации отказа пилотажно-навигационного комплекса. 2 н. и 1 з.п. ф-лы, 4 ил.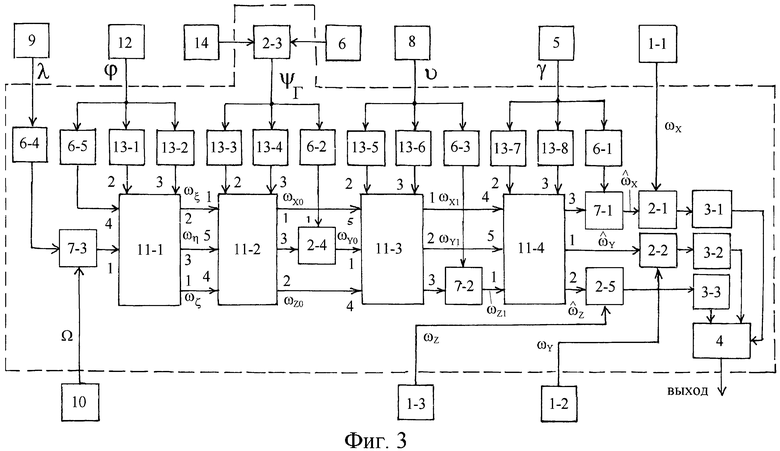
1. Способ контроля пилотажно-навигационного комплекса, основанный на измерении величины и направления абсолютной угловой скорости аппарата, величины угловых скоростей крена, тангажа, рыскания аппарата, отличающийся тем, что одновременно измеряют направления угловых скоростей крена, тангажа, рыскания аппарата, величины и направления угловых скоростей Земли, долготы, широты, курса аппарата, определяют сумму величин и направлений угловых скоростей Земли, долготы, широты, курса, рыскания, тангажа, крена аппарата, а затем полученную величину и направление суммы сравнивают с величиной и направлением абсолютной угловой скорости аппарата.
2. Устройство контроля пилотажно-навигационного комплекса, содержащее датчик абсолютной угловой скорости аппарата по продольной оси связанной системы координат, выход которого соединен с вычитающим входом первой схемы вычитания, выход которой через первый компаратор соединен с входом логической схемы ИЛИ, датчик угла крена аппарата, выход которого соединен с первым дифференциатором, датчик абсолютной угловой скорости аппарата по нормальной оси связанной системы координат, выход которого соединен с вычитающим входом второй схемы вычитания, выход которой через второй компаратор соединен с входом логической схемы ИЛИ, датчик угла рыскания аппарата, второй дифференциатор, датчик абсолютной угловой скорости аппарата по поперечной оси связанной системы координат выход которого соединен с вычитающим входом третьей схемы вычитания, выход которой через третий компаратор соединен с входом логической схемы ИЛИ, датчик угла тангажа аппарата, выход которого соединен с третьим дифференциатором, отличающееся тем, что в него введены первый, второй, третий, четвертый преобразователи координат, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой функциональные преобразователи, первый, второй, третий сумматоры, четвертая, пятая схемы вычитания, причем первый вход первого преобразователя координат соединен с выходом первого сумматора, входы которого соединены с выходом датчика угловой скорости Земли пилотажно-навигационного комплекса и выходом четвертого дифференциатора, соединенного с выходом датчика долготы пилотажно-навигационного комплекса, второй и третий входы первого преобразователя координат соединены соответственно с выходами первого и второго функциональных преобразователей, входы которых, как и вход пятого дифференциатора, выход которого соединен с четвертым входом первого преобразователя координат, подключены к выходу датчика широты пилотажно-навигационного комплекса, первый вход второго преобразователя координат соединен со вторым выходом первого преобразователя координат, а второй и третий входы - соответственно с выходами третьего и четвертого функциональных преобразователей, входы которых соединены с выходом четвертой схемы вычитания, входы которой подключены к выходам датчиков курса и рыскания пилотажно-навигационного комплекса, четвертый и пятый входы второго преобразователя координат соединены соответственно с первым и третьим выходами первого преобразователя координат, первый вход третьего преобразователя координат соединен с выходом пятой схемы вычитания, первый вычитающий вход которой, через второй дифференциатор, соединен с выходом четвертой схемы вычитания, а второй вход - с третьим выходом второго преобразователя координат, второй и третий входы - соответственно с выходами пятого и шестого функциональных преобразователей, входы которых, как и вход третьего дифференциатора, соединены с выходом датчика тангажа пилотажно-навигационного комплекса, четвертый и пятый входы третьего преобразователя координат соединены соответственно со вторым и первым выходами второго преобразователя координат, первый вход четвертого преобразователя координат соединен с выходом второго сумматора, один вход которого соединен с выходом третьего дифференциатора, а другой - с третьим выходом третьего преобразователя координат, второй и третий входы - соответственно с выходами седьмого и восьмого функциональных преобразователей, входы которых соединены с выходом датчика крена пилотажно-навигационного комплекса, четвертый и пятый входы четвертого преобразователя координат соединены соответственно с первым и вторым выходами третьего преобразователя координат, первый выход четвертого преобразователя координат соединен с суммирующим входом второй схемы вычитания, второй выход четвертого преобразователя координат соединен с суммирующим входом третьей схемы вычитания, третий выход четвертого преобразователя координат соединен с третьим сумматором, второй вход которого соединен с выходом первого дифференциатора, а выход - с суммирующим входом первой схемы вычитания.
3. Устройство контроля пилотажно-навигационного комплекса по п.2, отличающееся тем, что преобразователь координат содержит последовательно соединенные первый умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - со вторым входом преобразователя координат, и четвертый сумматор, второй вход которого соединен с выходом второго умножителя, а выход - с первым выходом преобразователя координат, последовательно соединенные третий умножитель, первый вход которого соединен с первым входом преобразователя координат, второй вход - с третьим входом преобразователя координат, шестая схема вычитания, суммирующий вход которой соединен с выходом третьего умножителя, вычитающий вход - с выходом четвертого умножителя, а выход - со вторым выходом преобразователя координат, четвертый вход преобразователя координат соединен с его третьим выходом, пятый вход - с первыми входами второго и четвертого умножителей, вторые входы которых соединены соответственно с третьим и вторым входами преобразователя координат.
| БЕЛОГОРОДСКИЙ С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с.270-271 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| Устройство для сравнения п-разрядных десятичных чисел | 1977 |
|
SU675420A1 |

