Изобретение относится к космической навигации и может быть использовано для автономного определения периода обращения космического объекта (КО) по орбите вокруг планеты.
Целью изобретения является повышение точности определения периода обращения КО, преимущественного по круговой орбите.
Указанная цель достигается тем, что в способе определения периода обращения космического объекта по орбите вокруг планеты включающем развертывание вблизи космического объекта гибкого элемента и измерение геометрических характеристик
относительно движения гибкого элемента, используют ГЭ в виде свободного замкнутого контура, который развертывают в плоскости орбиты КО с приданием ГЭ скорости в направлении вдоль его контура, совпадающем с направлением обращением КО по орбите, измеряют максимальный и минимальный диаметры контура, и по измеренным диаметрам и заданной скорости контурного движения определяют период обращения КО.
Сущность изобретения состоит в использовании зависимости связывающей величины максимального D и минимального d диаметров гибкого контура - с контурной
00
ю Ј
со VI
31821437 4
скоростью v и орбитальной угловой скоро-роликов 17, 18 (стрелки 22 на фиг.З), простью(Шо):граммными блоками и средствами контроля
3 QJb D ,3 ftfed формы и размеров контура ГЭ (лазерными
+ /} Г exPvjJ)сканирующими дальномерами или ТВ - каДля выполнения (1) необходимо, чтобы5 мерами, установленными на платформе 7
замкнутый контур (овальной формы)свобод-или на корпусе КО; данные известные средно- без механической связи с КО -двигалсяства также не показаны на чертежах),
по той же орбите, располагаясь в ее плоско-Привода 15,16 вращения ведущих ролисти (причем положение в плоскости орбитыков 13 и 14 выполнены поворотными (фиг.З)
отвечает состоянию устойчивого равнове-10 и снабжены соответствующими механизмасия контура, если циркуляция ГЭ вдоль кон-.ми (электромеханическими, пружинными и
тура того же направления, что и движениет.д.) для выведения роликов 13 и 14 из заКО по орбите).цепления с роликами 17 и 18.
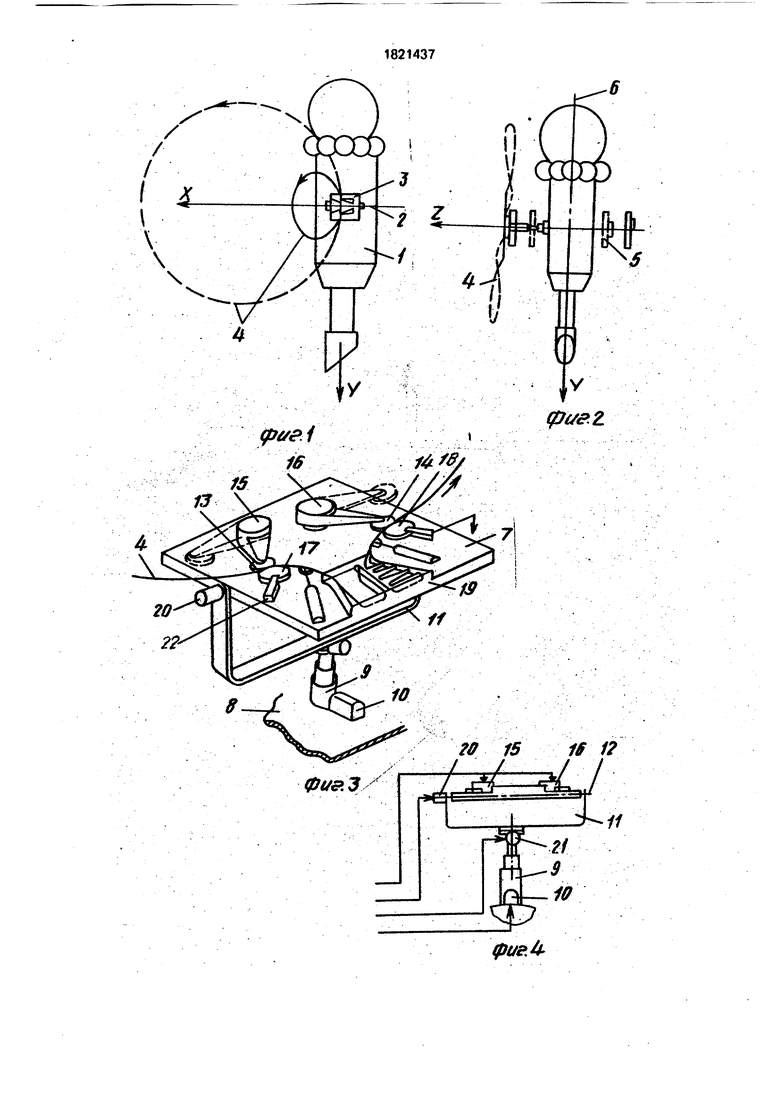
На фиг.1 дан вид в плоскости орбиты КОГибкий элемент может быть выполнен в
и формируемого контура ГЭ; на фиг.2 - вид15 виде тонкой кевларовой нити (с погонной
Ко в нормальной плоскости; на фиг.З - кон-массой 10 40 кг/м), на поверхность коструктивнэя схема устройства запуска ГЭ;торой может быть нанесено электропровона фиг.4 - то же, в одном из боковых видов;дящее (медное или алюминиевое) покрытие
на фиг.5 и 6 - промежуточные состояниятолщиной (0,5-1)мкм. Электрическое соедиразвертываемого ГЭ; на фиг.7 - показан ряд20 нение ГЭ с бортовыми источниками питания
возможных взаимных положений КО в ГЭ ввозможно через ролики 17, 18 или через
процессе измерений.специальные контакты. Приведенный приКО 1, ориентированный своей продоль-мер исполнения ГЭ отвечает его использоной осью вдоль местной вертикали (Ось Y)ванию в качестве антенны,
на орбите 2 вокруг планеты (ось х направле-25 Предлагаемый способ реализуется с по
на по скорости орбитального движения). мощью описанных выше средств следуюснабжен устройством 3 для запуска ГЭ 4,щим образом.
формируемого в виде замкнутого контураПосле того, как КО 1 займет положение
(фиг. 1). Для уменьшения возможных возму-(см.фиг.1 и 2) (с точностью до малых вибращений на КО во время развертывания ГЭ30 ционных колебаний). ГЭ начинает развертывозможна установка эксцентрикового про-ваться при вращении с помощью привода 16
тивовеса 5 (фиг.2), установленный симмет-роликов 14 и 18, выдающих запас ГЭ из
рично устройству 3 относительно плоскостиемкости 19 (ролики 13 и 17 заторможены).
6 орбиты 2 (ось Z совпадает с бинормалью).Для более эффективного развертывания
Устройство для запуска ГЭ (фиг.З) мо-35 контура ГЭ платформа 7 (вместе с рамкой жет быть выполнено в виде платформы 7,11) может быть придано вращение в плоскосвязанной с корпусом 8 КО 1 посредствомсти орбиты КО с помощью привода 21 вра- шарнирного подвеса, содержащего теле- щения вокруг оси штанги 9 (фиг.4). В скопическую штангу 9 с приводом 10 изме-процессе формирования контура ГЭ приво- нения длины штанги, шарнирно связанную40 ды 10 и 20 могут корректировать -по сигна- с концом штанги раму 11, на оси 12 которойлам системы управления - положение установлена платформа 7. На платформеплатформы 7, совмещая ее мгновенную пло- размещены кинематические звенья Для . скость с плоскостью контура. Одновремен- придания ГЭ 4 контурного движения веду-но, может регулироваться вращение, щие прижимные ролики 13 и 14 с приводами45 дисбаланс и вынос з плоскости 6 эксцент- 15 и 16 вращения; ведомые ролики 17, 18 (срикового противовеса 5 (фиг.2). которыми, например, связаны датчики кон-После того, как запас ГЭ выбран из ем- турной скорости ГЭ), а также емкость (бух-кости 19 (что может быть зафиксировано та) 19 для хранения запаса ГЭ. Роликисоответствующим датчиком), включаются в следует выполнить профилированными для50 работу ролики 13 и 17, вращающиеся синх- предотвращения выскальзывания из них ГЭ.ронно с роликами 14 и 18 (при этом натяжеУстройство 3 снабженй приводом 20ние ГЭ между парами роликов может
вращения платформы 7 вокруг оси 12, а так-контролироваться каким-либо датчиком, наже приводом 21 (фиг.4) вращения рамки 11тяжения типичным для тросовых систем).
вокруг оси штанги 9. Приводы 10,15, 16, 20.5 Возможен вариант, когда ролики 13,17 вра21 связаны входами с системой управлениящаются пассивно, а функции привода 15
развертыванием ГЭ (не показана). В своюсводятся к притормаживанию ГЭ (в этом
очередь, входы Этой системы управленияслучае с приводом 15 может быть объединен
связаны с датчиками скоростей вращениядатчик натяжения ГЭ).
Контур, сформированный при вращении платформы 7. показан (в разных мгновенных положениях) на фиг.5. Постепенно тормозя вращение платформы с контуром ГЭ, переводят платформу в фиксированное состояние с ориентацией оси 12 рамки 11 в направлении, близком к местной вертикали (оси Y), после чего уменьшают контурную скорость до требуемого значения v, стабилизируют и запоминают это значение (ис- пйльзуя каналы 22, фиг.З). После того, как. колебания контура уменьшатся до допустимого уровня, а его форма станет приемлемой для измерений (в смысле достаточной величины отношения O/d) - см.фиг.6 - про- изводится снятие механических связей между ГЭ и КО. Это осуществляется отведением роликов 13, 14 (с приводами 15, 16) и платформы 7 (с помощью привода 10 штанги 9) от контура ГЭ.
Свободно расположенный контур (фиг.7) имеет овальную форму, в соответствии с 1. Измеряя с помощью подходящих средств (ТВ - камер или лазерных устройств) параметры контура: его максималь- ны и и минимальный диаметр (которые могут быть выявлены обработкой изображений контура), определяют, исходя из (1), и известного значения скорости у, значение угловой орбитальной скорости зд .;
Контур 4 в силу разных причин может медленно перемещаться относительно КО (фиг.7). При необходимости повторного использования этот контур может быть воз вращен на борт КО при помощи какого-либо известного захватного прит споеобления.
Если же требуется проведение нескольких измерений, то следует запастись соответствующим количеством ГЭ. В этом
случае устройство запуска ГЭ (фиг.3-4) может быть выполнено в кассетном варианте (например, с несколькими снаряженными емкостями типа 19, снабженными устройствами подачи и отстрела использованных емкостей).
В другом варианте вместо платформы 7 (фиг.З) может быть использована призма (с 3-4 гранями), на каждой из граней которой установлены емкости и механизмы, аналогичные тем. что размещены на платформе 7.
Технико-экономическая эффективность предлагаемого изобретения состоит в обеспечении достаточно высокой точности авто- номного определения периода обращения КО по орбите при помощи простых и недорогих средств.
Фор мула изобретения
Способ определения периода обращения космического объекта по орбите вокруг планеты, включающий развертывание вблизи космического объекта гибкого элемента и измерение геометрических характеристик относительно движения гибкого элемента, отличающийся тем, что, с целью повышения точности определения периода обращения космического объекта преимущественно по круговой орбите, используют гибкий элемент в виде замкнутого контура, который развертывают в плоскости орбиты космического объекта с приданием гибкому элементу скорости в направлении вдоль его контура, совпадающем с направлением обращения космического объекта по орбите, измеряют максимальный и минимальный диаметры контура и по измеренным диаметрам и заданной скорости контурного движения определяют период обращения космического объекта.
//


Изобретение относится к космический навигации и может быть использовано для автономного определения периода обращения космического объекта (КО) по орбите вокруг планеты. Целью изобретения является повышение точности определения периода обращения космического объекта, преимущественно по круговой орбите. В способе определения периода обращения КО по орбите вокруг планеты, включающем развертывание вблизи КО гибкого элемента измерение геометрических характеристик относительно движения ГЭ, используют гибкий элемент в виде свободного замкнутого контура, который развертывают в плоскости орбиты космического объекта с приданием гибкому элементу скорости в направлении вдоль его контура, совпадающем с направлением обращения космического объекта по орбите, измеряют максимальный и минимальный диаметры контура и по измеренным Диаметрам и заданной скорости контурного движения определяют период обращения космического объекта. 7 ил. in
фиеЛ
X
| Горькое В.Л | |||
| Космические радиолинии, сер | |||
| Космонавтика, астрономия | |||
| М.: Знание | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Davis W.R | |||
| and Banevjee А.К./ Llbvatfon damping of a tethered satellite by Yo-Vo Control with angle measurement// | |||
| Guld: Cbntrand Dyn | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
