Данное изобретение относится к области прикладного применения космической техники для обеспечения безопасности функционирования космических аппаратов на геостационарной орбите и устранения возможных помех их работе.
Расположенная над земным экватором геостационарная орбита в силу ее физических особенностей является уникальным ограниченным ресурсом (находящийся на ней спутник неподвижен относительно поверхности планеты, поэтому направленная на него антенна не требует постоянного перенацеливания) и в настоящее время загружена достаточно плотно. На начало 2013 года на ГСО находилось более 420 активных спутников (из них 65% - коммерческие) совокупной стоимостью более 55 млрд долларов (по оценке консалтинговой компании ЗАО «Лога групп», аккредитованным партнером Фонда «Сколково»). Предполагается, что с 2014 по 2020 год орбитальная группировка будет пополняться не менее чем 20 аппаратами ежегодно. В соответствии с требованиями радиоэлектронной совместимости на геостационарной орбите есть место только для 360 космических аппаратов связи.
Известно, что популяция космического мусора в области геостационарных орбит (ГСО) составляет около 1,5 тыс.объектов, что представляет угрозу столкновения с управляемыми космическими аппаратами (КА) (Диденко А.В., Демченко Б.И., Усольцева Л.А., Афонин А.Н. и др. Зональный каталог геостационарных спутников. Выпуск 2, 2000, Алматы, Гылым, 108 с.).
В настоящее время на ГСО действует группировка метеоспутников, образованная КА различных государств: GOES (США), Meteosat (Европа), GMS (Япония), Insat, Metsat (Индия), FY-2 (Китай). С января 2011 года на ГСО функционирует российский геостационарный спутник «Электро-Л». КА выведен в точку стояния 76° в.д. над Индийским океаном, что позволяет осуществлять постоянное наблюдение территории РФ.
Анализ эволюции движения неуправляемых космических объектов (КО) в области ГСО выявил следующие особенности изменения параметров орбиты по времени. Поскольку геостационарная орбитальная плоскость не совпадает с плоскостями орбит Земли и Луны, гравитационные силы этих тел действуют таким образом, чтобы переместить КО с их экваториальных орбит, постепенно увеличивая орбитальное наклонение объектов. Кроме того, в связи с некруговой формой земного экватора часть неуправляемых КО медленно перемещаются к одной из двух точек устойчивого равновесия вдоль экватора. В результате осуществляется восточно-западная либрация (дрейф вперед и назад) КО относительно этих точек и возникает опасность их столкновения с другими геостационарными спутниками.
Часть других неуправляемых КО дрейфуют лишь в одном направлении: с запада на восток, если их период обращения вокруг Земли меньше звездных суток или с востока на запад в противоположном случае. Величину среднесуточного дрейфа D долготы геостационарного КО можно определить по приближенной формуле:
D=360(1440/Ps-1,00273791) (°/сут.)
где Ps - сидерический период обращения геостационарного КА вокруг Земли в минутах солнечного времени.
С учетом влияния долготных составляющих в разложении потенциала Земли в степенные ряды установлено, что на геостационарной орбите имеются два устойчивых положения равновесия - точки либрации: 75° и 255° восточной долготы и два неустойчивых положения, отстоящих от устойчивых точек ~на 90°.
В рамках упрощенной симметричной трехосной модели Земли изменение долготы пассивного геостационарного космического аппарата с достаточной степенью точности можно описать уравнением маятника: d2f/dt2-Dk2/2sin(2f)=0,
где f=λ-λL - восточная долгота космического аппарата, λL - долгота одной из точек либрации, Dk=0,437°/сут - внешний параметр, играющий роль критического дрейфа долготы (Об особенностях динамики сближений ка с фрагментами космического мусора в области геостационарных орбит. Н.Л. Соколов, П.А. Захаров. Центр управления полетами ФГУП «Центральный научно-исследовательский институт машиностроения» г. Королев, Московская область, Россия).
Особенностями динамики движения космических объектов в области геостационарных орбит является дрейф неуправляемых космических объектов. Учет прогноза их движения позволяет определить даты опасных сближений. Например, для КА «Электро-Л» в 2011 году определено опасное сближение с космическим мусором на 50 км.
В соответствии с рекомендациями Руководящих принципов по предотвращению техногенного засорения околоземного космического пространства, принятых международным сообществом (Руководящие принципы предупреждения образования космического мусора, разработанные Международным координационным комитетом по космическому мусору. Комитет ООН по использованию космического пространства в мирных целях, Научно-технический подкомитет. Сороковая сессия. 2003 год. A/AC.105/C.2/L.260), космические аппараты, выработавшие своей ресурс и прекратившие активное существование, должны освободить место на геостационарной орбите путем удаления этих аппаратов на орбиту захоронения. В качестве зоны захоронения выбраны орбиты выше и ниже геостационарной орбиты.
Нефункционирующие космические аппараты являются актуальной проблемой для космической деятельности, в связи с чем поставлена задача удаления их как космического мусора.
Для удаления космического мусора в настоящее время предложен целый ряд технических решений, которые являются аналогами предлагаемого изобретения. Например, воздействие лазером на космический мусор. Исследовательский центр НАСА имени Эймса под руководством Джеймса Мейсона разрабатывает лазер средней мощности (около 5 кВт), который будет воздействовать на объекты в течение одного-двух часов в день. За сутки можно контролировать до 10 объектов космического мусора на низкой околоземной орбите (по материалам Technology Review).
Предлагаемое решение лазерной очистки от космического мусора, рассматриваемое для применения на низких орбитах, для использования на геостационарной орбите не реализуемо из-за возрастания технических сложностей, связанных с удаленностью геостационарной орбиты.
В патенте Boeing описан способ космической уборки с помощью облака газа, распыляемого в определенном месте околоземного пространства в точно рассчитанное время. Диаметр облака составит от 50 до 500 километров и просуществует несколько минут, чтобы затормозить попавшие в него объекты космического мусора на несколько сотен метров в секунду, благодаря чему они быстро сойдут с орбиты.
Известен патент US 2013240675 «Система и способ индуцирования быстрого повторного ввода орбитальных обломков, в том числе определение пространственного масштаба орбитального мусора, пыли и развертывания на орбитальных обломков, чтобы повысить сопротивление на орбитальных обломках». Данный способ предназначен для удаления космического мусора с перигеем 900 км. Предлагаемое решение также неприменимо для очистки геостационарной орбиты.
Основное направление, в котором работают инженеры, занимающиеся проблемой космического мусора - создание спутников-уборщиков, которые будут захватывать и сбрасывать в атмосферу обломки.
Аналогами предлагаемого изобретения являются проектные технические решения с использованием космических аппаратов для уборки космического мусора. Например, спутник CleanSpace One, разработанный Федеральной политехнической школой Лозанны EPFL и Швейцарскими Космическими Системами будет убирать космический мусор на орбите, уводя его с орбиты, используя захват с гибкими щупальцами. Запуск CleanSpace One намечается на 2018 год. Однако область применения такого космического аппарата - низкие и средневысотные орбиты.
Ракетно-космическая корпорация "Энергия" разрабатывает пилотируемый космический корабль, который помимо ремонтных работ в околоземном космическом пространстве будет очищать орбиту от крупных кусков космического мусора. Запуск нового корабля будет производиться с нового космодрома Восточный, расположенного в Амурской области и планируется в 2018 году. («Новый российский космолет сможет убирать мусор». Новости космоса. Июль 2011 г. Astronews)
Аналогами предлагаемого изобретения являются технические решения по удалению космического мусора, включая нефункционирующие аппараты, с использование специализированных космических аппаратов, захватывающих космический мусор или воздействующих на него и удаляющих с орбиты. Аналогами являются патенты № RU 2040448, RU 2040449, RU 2046081, RU 2000259.
Недостатками аналогов являются высокие затраты на разработку и выведение специализированных космических аппаратов для удаления космического мусора с геостационарной орбиты.
Известен патент US 2013306798 «Система управления удаления мусора и способ удаления космического мусора». В соответствии с этим патентом предполагается скорость космического мусора замедлять для сокращения срока его существования на околоземной орбите или обеспечивать его захват для увода с орбиты.
Изобретение по патенту US 2013306798 выбрано в качестве прототипа.
В рамках защищенного технического решения предложены варианты удаления космического мусора, обеспечивая уменьшение скорости космического мусора или применяя его захват для увода с орбиты.
Недостатком прототипа, так же как и аналогов, является необходимость использования специального космического аппарата, создаваемого только для выполнения одной функции - расчистки космического пространства от космического мусора, что является высокозатратным.
Целью предлагаемого изобретения является снижение затрат на расчистку геостационарной орбиты от крупногабаритного космического мусора, в частности от нефункционирующих космических аппаратов.
Существо изобретения заключается в использовании средств расчистки геостационарной орбиты в качестве дополнительной нагрузки при выводе на геостационарную орбиты основного космического аппарата (ОКА) и использовании этого средства после окончания срока активного существования (целевого функционирования) Космического аппарата путем перехода в точку стояния нефункционирующего космического аппарата (НКА), наведения на него, захвата и увода связки космических аппаратов с геостационарной орбиты на орбиту захоронения.
Способ удаления нефункционирующего космического аппарата с геостационарной орбиты путем захвата его и увода на орбиту захоронения с использованием космического аппарата заключается в том, что на геостационарную орбиту выводят космический аппарат, оснащенный средством наблюдения и захвата нефункционирующего космического аппарата, дополнительным запасом компонентов топлива и после окончания срока активного существования космического аппарата переводят его в точку стояния на геостационарной орбите нефункционирующего космического аппарата, осуществляют ориентацию относительно нефункционирующего космического аппарата и наведение на него, после чего производят захват нефункционирующего космического аппарата, включают двигатель космического аппарата и переводят связку космических аппаратов на орбиту захоронения.
По предлагаемому способу, перед выводом космического аппарата на геостационарную орбиту в программу функционирования этого определяют данные по нефункционирующему или заканчивающему свое функционирование космическому аппарату (НКА) к моменту окончания срока активного существования основного космического аппарата.
В эти данные включают: координаты точки стояния НКА на геостационарной орбите, баллистические характеристики движения НКА с учетом его дрейфа, конструктивные особенности НКА, характеризующие условия его захвата.
По расстоянию точки стояния НКА от точки стояния ОКА и баллистическим характеристикам движения определяют необходимое количество компонентов топлива для перехода в точку стояния НКА с учетом затрат топлива на маневрирование около НКА и перевод связки на орбиту захоронения. Определяют технические требования к устройству захвата НКА и рассчитывают характеристики перевода связки ОКА и НКА на орбиту захоронения.
В качестве резервного варианта, в случае изменения обстановки на геостационарной орбите, предусматривают запасные программы для перенацеливания на другой НКА на доступном расстоянии от точки стояния ОКА и соответствующего по условиям захвата и увода в связке на орбиту захоронения. Перенацеливание осуществляется по командам наземного сегмента управления в процессе завершения срока активного существования ОКА.
В результате подготавливают программу действий для ОКА по расчистке геостационарной орбиты и для реализации предлагаемого способа вносят в конструкцию ОКА следующие добавления в соответствии с этой программой.
Увеличивают запасы компонентов топлива двигателя до уровня, необходимого для перехода на ГСО до заданной точки стояния и отработки маневра увода связки. В случае использования для перехода на геостационарной орбите электрореактивных двигателей предусматривают ресурсы их работы, достаточные для выполнения задачи перехода на расстояние до точки стояния выбранного НКА.
Предусматривают в конструкции ОКА средства наблюдения для наведения на НКО, включая видеоканал связи с наземным сегментом управления, с возможностью режима самонаведения ОКА на НКА.
Предусматривают в конструкции ОКА устройство захвата НКА способом, выбранным для конкретного НКА из условий обеспечения надежной связки космических аппаратов при жестком ограничении веса устройства захвата. В качестве вариантов устройства захвата могут быть использованы различные технические решения на основе средств, экономичных по затратам и минимальных по весу, включая разработки компаниями ведущих космических держав.
Среди известных технических решений по захвату космического мусора: специальный гарпун, разрабатываемый британской компанией Astrium UK (Сообщение ВВС News). Захват космического мусора осуществляют при подходе к нему на расстояние 20 метров, выстрелом гарпуна с заданной силой удара; сети, разрабатываемые Японским космическим агентством (JAXA), которое заключило договор с компанией Nitto Seimo по изготовлению сетей для захвата космического мусора на основе технологии плетения металлических сетей.
Существо изобретения иллюстрируют следующие чертежи:
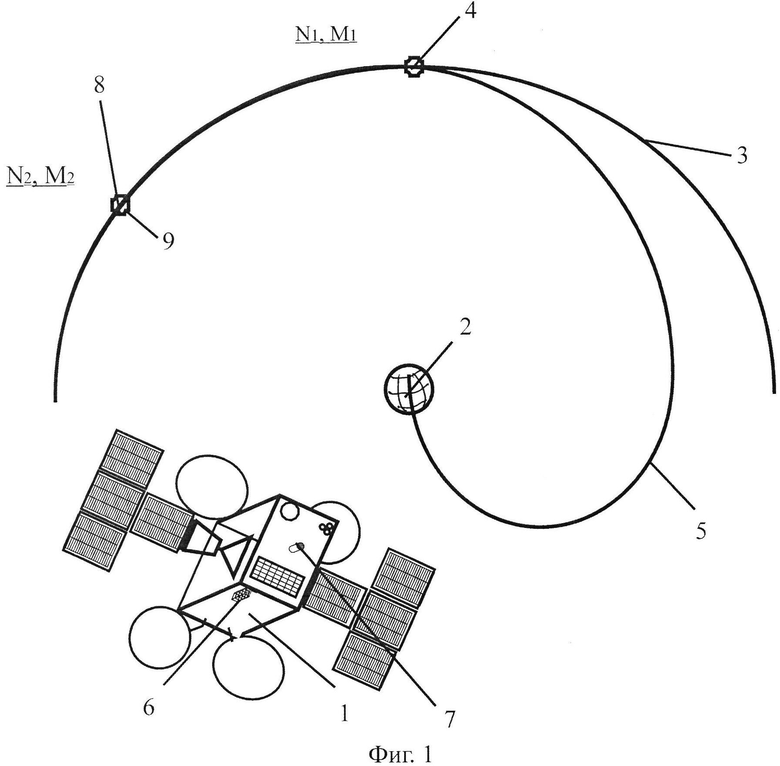
фиг.1 - вывод ОКА на геостационарную орбиту в точку стояния штатного функционирования;
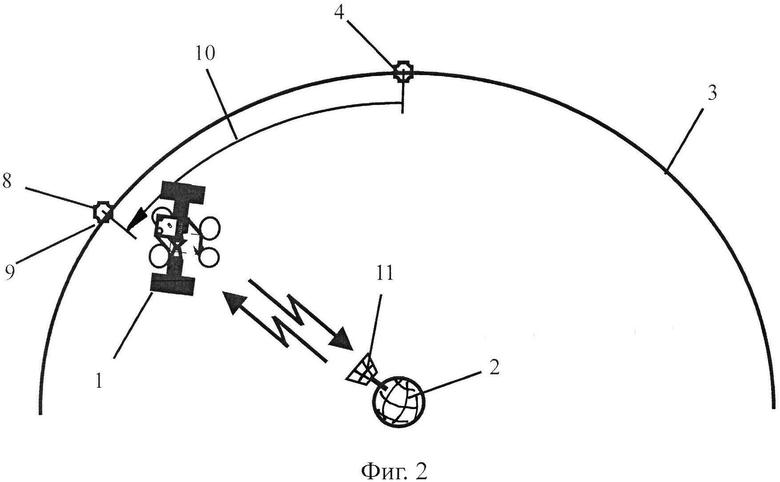
фиг.2 - перевод ОКА после окончания функционирования в точку стояния нефункционирующего КА;
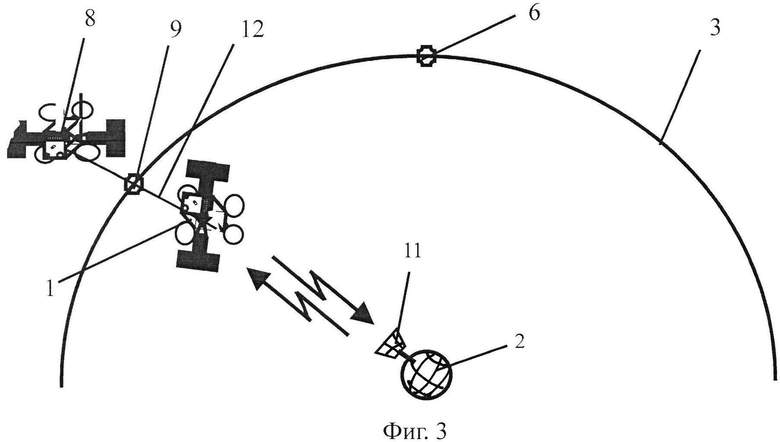
фиг.3 - наведение на нефункционирующий КА и захват его средством КА;
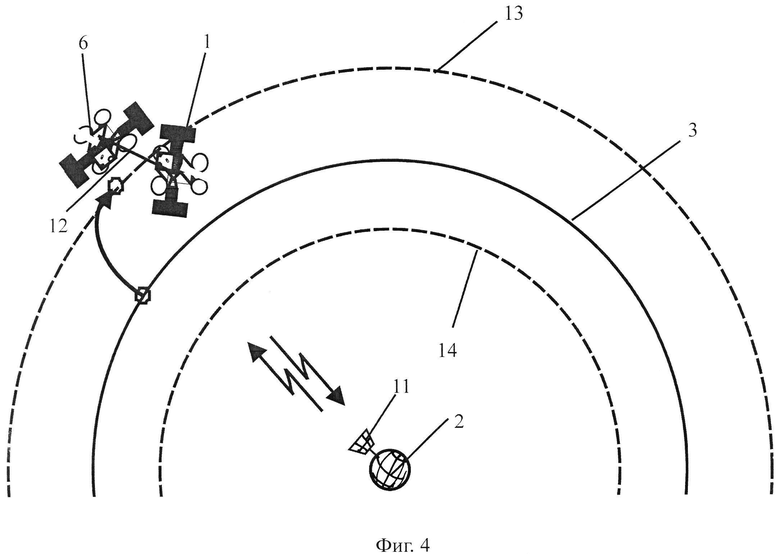
фиг.4 - включение двигателей КА и перевод связки КА и НКА с геостационарной орбиты на орбиту захоронения;
фиг.5 - пример эволюции движения космического аппарата на орбите захоронения;
фиг.6 - упрощенная схема ОКА с устройством для реализации предлагаемого способа;
фиг.7 - наведение на НКА и его захват с помощью гарпуна на тросе;
фиг.8 - захват НКА с помощью анкерного соединения при сверлении его корпуса средством КА;
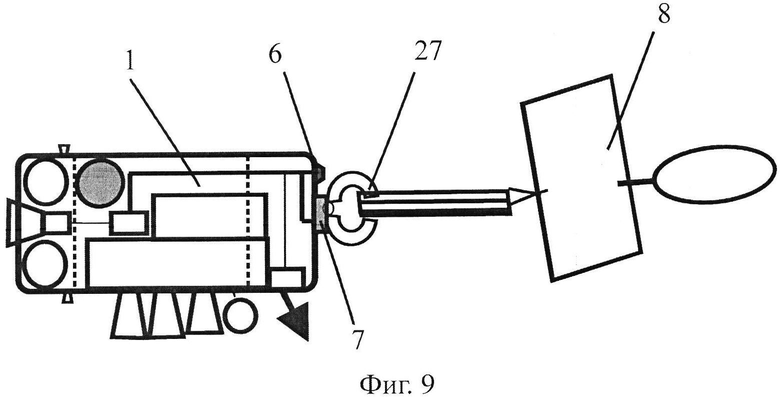
фиг.9 - захват НКА с помощью манипулятора (механического захвата);
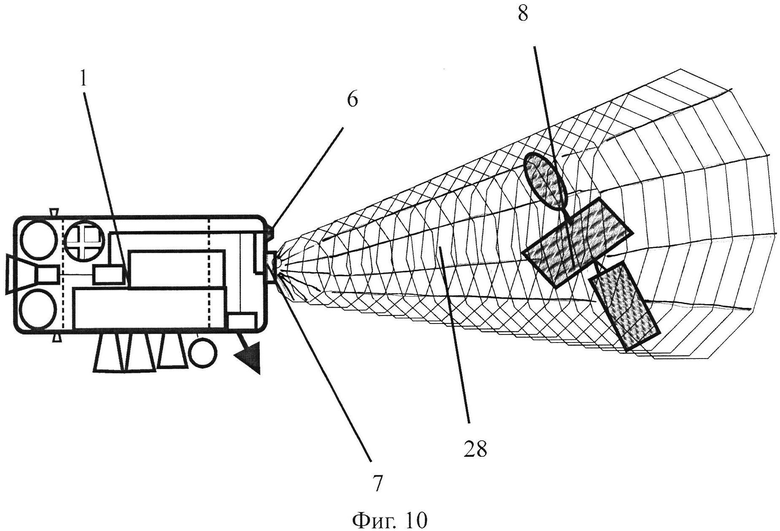
фиг.10 - захват НКА с помощью выстреливаемой с КА сетки и ее затягивания.
Реализация предлагаемого способа осуществляется следующим образом. После выполнения обеспечивающих операций по подготовке программы расчистки геостационарной орбиты, включающей выбор объекта удаления, расчет необходимых ресурсов и разработку математического обеспечения на основе баллистического расчета перемещения ОКА по геостационарной орбите в точку стояния объекта удаления и программы создания связки космических аппаратов и операции по переводу связки на орбиту захоронения, на орбиту штатной эксплуатации космического аппарата в утвержденной точке стояния выводят ОКА, в котором дополнительно к аппаратуре, необходимой для выполнения функциональных задач и обеспечивающей служебной аппаратуре, устанавливают дополнительно средства наведения и захвата другого космического аппарата (НКА).
На фиг.1 показаны запуск ракеты-носителя с ОКА 1 с Земли 2 на геостационарную орбиту 3 в заданную точку стояния 4 с координатами N1, M1 (N - градусы, М - долгота - восточная или западная) при маневрировании перевода на переходных орбитах 5.
ОКА оснащенный системой наблюдения наведения 6 и захвата 7 осуществляет свое штатное функционирование в точке стояния 4 до момента окончания срока активного существования в связи прекращением работы основной аппаратуры из-за исчерпания ресурса, физического или морального износа.
Завершающим этапом функционирования ОКА является выполнение программы по удалению НКА 8 из точки стояния 9 с координатами N2, M2 с геостационарной орбиты. Для этого (фиг.2) производят перевод ОКА 1 на геостационарной орбите в точку стояния 9 заданного НКА 8. При этом осуществляют выполнение комплекса команд по проведению маневрирования ОКА под управлением наземного сегмента 11, используя двигатели ОКА.
После перевода ОКА 1 (фиг.3) на достаточно близкое расстояние к точке стояния 9 НКА 8 проводят наведение его на НКА 8 под управлением наземного сегмента 11, используя средство наблюдения 6 - видеоканал и систему связи, двигательную систему и систему ориентации ОКА затем включают систему захвата 7, производят захват НКА создавая надежное зацепление двух космических аппаратов - связку 12.
Возможно использование системы самонаведения ОКА на НКА 8, обеспечивающей подготовку момента включения системы захвата НКА.
После подтверждения результата получения связки (сцепки) космических аппаратов (фиг.4) производят дополнительную ориентацию ОКА и включение основного двигателя ОКА для увода связки космических аппаратов с геостационарной орбиты 3 на орбиту захоронения, расположенную выше ГСО 13 или ниже ГСО 14.
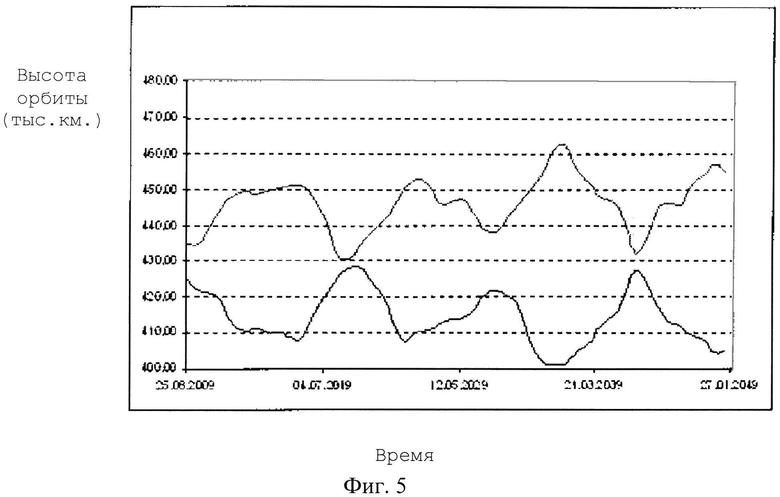
На фиг.5 показана эволюция движения космического аппарата около геостационарной орбиты, переведенного на орбиту захоронения, на примере космического аппарата «Экспресс-АМ».
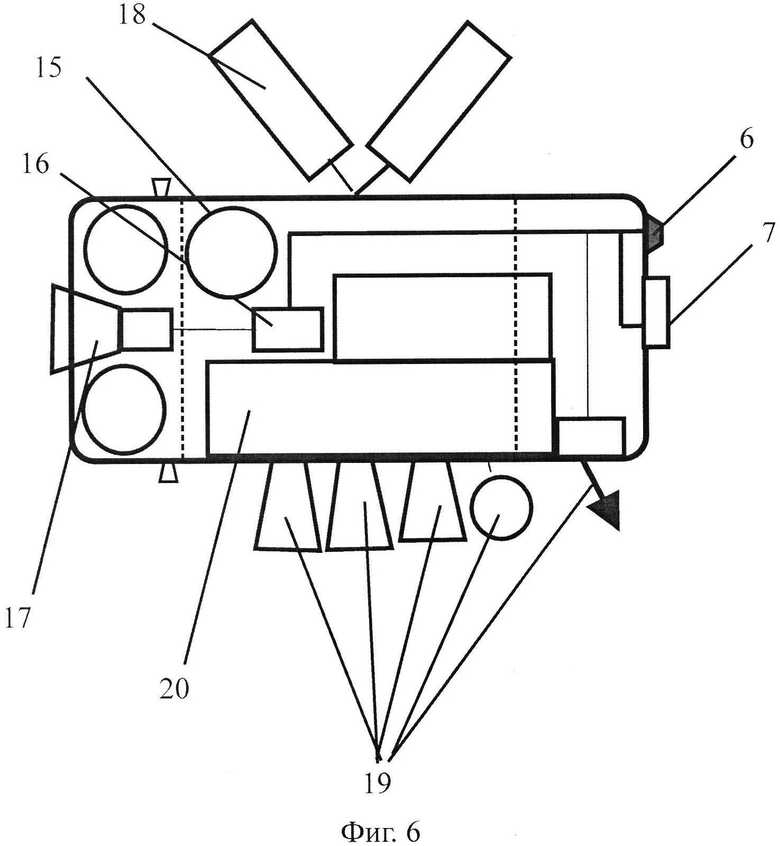
На фиг.6 показана упрощенная схема космического аппарата ОКА 1 в части необходимого оснащения для выполнения операции по уводу НКА с геостационарной орбиты в соответствии с предлагаемым изобретением.
ОКА 1 снабжают дополнительным запасом компонентов топлива 15 для реализации этой операции. В конструкции ОКА предусматривают устройство наблюдения для наведения на НКА на ближнем расстоянии 6 и устройство захвата 7, выбранное в соответствии с техническими и баллистическими характеристиками НКА, намеченного для удаления. В системе управления 16 ОКА предусматривают резервирование для обеспечения гарантированного выполнения функции ОКА по уводу НКА, завершающей его срок активного существования, при уровне отказов в конце срока службы основной и обеспечивающей аппаратуры ОКА, включая ОДУ 17, солнечные батареи 18, антенные устройства 19, служебную аппаратуру 20.
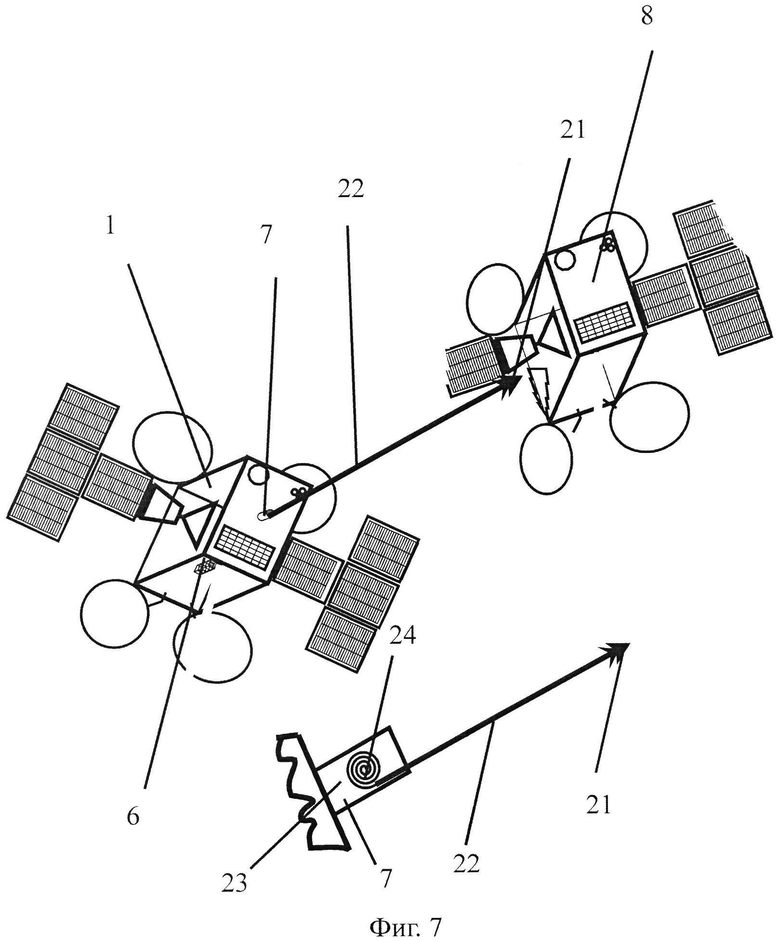
На фиг.7 показано завершение этапа наведения ОКА 1 на НКА 8 и применение варианта средства захвата НКА 8 с помощью гарпуна 21 с тросовой связью 22, выстреливаемого в корпус НКА. Тросовая связь 22 разматывается с устройства 23, содержащего катушку 24.
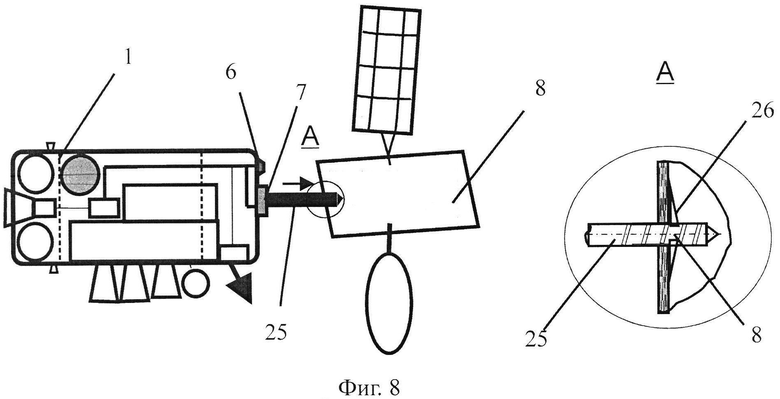
На фиг 8. показан вариант создания связки космических аппаратов ОКА 1 и НКА 8 с помощью механического устройства обработки для захвата с использованием сверления, приводимым от электродвигателя, и введения в НКА анкерного крепления 26.
На фиг.9 показан вариант создания связки космических аппаратов ОКА 1 и НКА 8 с помощью устройства захвата манипулятором или механическим захватом 27 с приводом от электродвигателя.
На фиг.10 показан вариант создания связки космических аппаратов ОКА 1 и НКА 8 с помощью выстреливания гибкой сетки 28, накидываемой на НКА. Применение такого варианта захвата целесообразно при вращении НКА вокруг центра масс, которое затрудняет использование других вариантов.
Техническим результатом использования изобретения является: повышение эффективности работы космических аппаратов на геостационарной орбите и их безопасности за счет обеспечения устранения с этой орбиты НКА (космического мусора) в соответствии с международными рекомендациями по предотвращению техногенного засорения околоземного космического пространства.
Экономическая эффективность предлагаемого способа заключается в уменьшении стоимости операции по удалению НКА по сравнению с использованием средств, предлагаемых прототипом, на геостационарной орбите. Так, в стоимость реализации предлагаемого способа входит оснащение КА дополнительным запасом компонентов топлива, устройством ближнего наведения на НКА и средством его захвата, стоимость вывода дополнительного веса на геостационарную орбиту, затраты на функционирование наземного сегмента при управлении операции удаления НКА. По оценкам специалистов суммарная стоимость реализации предлагаемого способа будет меньше, чем осуществление аналогичных проектов, требующих вывода на геостационарную орбиту средств, специализированных для удаления космического мусора.
Изобретение относится к космической технике и может быть использовано для удаления нефункционирующего космического аппарата (КА) с геостационарной орбиты. Выводят на геостационарную орбиту КА со средством наблюдения и захвата нефункционирующего КА и дополнительным запасом компонентов топлива, переводят КА после окончания срока активного существования в точку стояния на геостационарной орбите нефункционирующего КА, осуществляют ориентацию относительно нефункционирующего КА, наводят на нефункционирующий КА, захватывают нефункционирующий КА, включают двигатель КА, переводят связку космических аппаратов на орбиту захоронения. Изобретение позволяет повысить эффективность и безопасность работы КА на геостационарной орбите. 10 ил.
Способ удаления нефункционирующего космического аппарата с геостационарной орбиты путем захвата его и увода на орбиту захоронения с использованием космического аппарата, отличающийся тем, что на геостационарную орбиту выводят космический аппарат, оснащенный средством наблюдения и захвата нефункционирующего космического аппарата, дополнительным запасом компонентов топлива, и после окончания срока активного существования космического аппарата переводят его в точку стояния на геостационарной орбите нефункционирующего космического аппарата, осуществляют ориентацию относительно нефункционирующего космического аппарата и наведение на него, после чего производят захват нефункционирующего космического аппарата, включают двигатель космического аппарата и переводят связку космических аппаратов на орбиту захоронения.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| US 20130140403 A1, 06.06.2013; | |||
| US 5421540 A1, 06.06.1995 | |||

