Изобретение относится к авиации, в частности к оборудованию системы бортовых измерений.
Целью изобретения является расширение эксплуатационных возможностей за счет обеспечения возможности контроля угла установки стабилизаторов в течение всего полета летательного аппарата.
На фиг.1 изображен общий вид размещения датчиков на летательном аппарате; на фиг.2 узел I на фиг.1; на фиг.3 вид по стрелке А на фиг.2; на фиг.4 узел 2 на фиг.2; на фиг.5 электрическая схема подключения датчиков штатной и контрольно-записывающей аппаратуры.
Устройство для контроля угла поворота α управляемого стабилизатора 1 (см. фиг. 1,2,5), размещенного на оси 2, расположено в зоне хвостового кока фюзеляжа 3 летательного аппарата 4 и содержит дополнительную измерительную аппаратуру 5 в виде блока контрольно-записывающей аппаратуры, причем хорда крыла 6 размещена под углом Ψ (см. фиг.1), а хорда 7 стабилизатора 1 с помощью привода 8 выводится на определенный угол, фиксируемый посредством установленного на кронштейне 9 (см. фиг.2) дополнительного датчика 10 угла отклонения стабилизатора, электрически присоединенного к аппаратуре 5, причем угол поворота β будет зафиксирован чувствительным элементом (головкой) 11 этого потенциометрического датчика 10. Кронштейн 9 установлен с зазором Н относительно стабилизатора 1. Кинематическая связь чувствительного элемента (головки) 11 датчика 10 выполнена в виде Z-образного рычага 12, установленного с возможностью фиксированного перемещения в головке 11, а рычаг 12 шарнирно закреплен на одном конце тяги регулируемой длины 13. Другой конец этой тяги 13 шарнирно соединен с одними из концов шарнирных тяг 14 и 15, образуя на шкворне 16 веер.
Свободный конец тяги 14 присоединен к шарнирному узлу 17 стабилизатора, а свободный конец тяги 15 шарнирно закреплен на оси индукционных датчиков 18, причем тяга 15 совершает поворот на угол ω, при отклонении стабилизатора на угол α=γ+ϕ. Высота Н1 стенки 19 рычага 12 с концами 20 и 21 (см. фиг.3,4) превышает регулируемый зазор Н2 (т.е. Н1 и Н2). Конец 21 рычага 12 присоединен фиксатором 22 к тяге 13, причем шкворень 16 имеет регулировочный носик 23 для шарнирного крепления другого конца тяги 13 к тягам 14 и 15 (образуется веер). Кронштейн 9 имеет ребро 24, а также полки 25 и 26, электросоединитель 27 с кабелем 28 для связи датчика 10 с измерительной аппаратурой 5.
Ребром 24 и полкой 25 кронштейн 9 закреплен болтами 29 на основании фюзеляжа 3, а под полкой 26 установлен датчик 10, причем верхний край этой полки 26 установлен с зазором Н (см.фиг.2) относительно стабилизатора 1 при его нижнем отклонении положения на угол α (изображено это положение штрихпунктирными линиями) и повороте рычага 12 датчика 10 на угол β (см. фиг.2 и 4). Летательный аппарат 4 имеет продольную ось 30 фюзеляжа 3. Установка хорды 7 стабилизатора 1 осуществляется относительно этой оси 30, аналогично и хорды крыла 6. Кроме измерительной аппаратуры 5 имеется "черный ящик" штатная измерительная аппаратура 31 сигналов от основных датчиков 18, контроль записи которых и осуществляет датчик 10.
На заключительном этапе проводят исследовательские работы по измерению угла установки стабилизатора 1 на наибольшие углы γ и ϕ по абсолютному значению, преимущественно в режиме захода на посадку, когда стабилизатор 1 переставлен вниз на большую величину по сравнению с режимом горизонтального полета. Основные датчики с осями 18 (см.фиг.2,5) имеют корпуса 32, электрически подключенные кабелем 33 к штатной измерительной аппаратуре 31 сигналов 34 от основных датчиков 18, а сигналы 35 от датчика 10 поступают на блок сравнения 36 сигналов и с него на дополнительную измерительную аппаратуру 5.
Для обеспечения балансировки летательного аппарата 4 (см.фиг.1) на различные углы атаки в процессе полета включают привод 8 на отклонение хорды 7 стабилизатора 1 относительно продольной оси 30 его установки на фюзеляже 3, либо выше этой оси 30, либо ниже, причем полный диапазон отклонения составляет угол α (см.фиг.2). На самолете Ил-96-300 этот угол: α=γ+ϕ=(+2о)+(-12о)=14о.
В процессе углового перемещения хорды 7 стабилизатора 1 на оси 2 происходит перемещение узла 17 с тягой 14, конец которой шарнирно закреплен на шкворне 16 совместно с тягами 13 и 15 основных датчиков 18 штатной аппаратуры 31, причем благодаря шарнирному закреплению тяги 15 на осях основных датчиков 18 штатной аппаратуры 31, причем благодаря шарнирному закреплению тяги 15 на осях основных датчиков 18 ее конец со шкворнем 16 движется по траектории окружности, увлекая за собой на носике 23 тягу 13 и присоединенный фиксатором 22 к этой тяге 13 рычаг 12 (его конец 21) датчика 10 (происходит одновременное перемещение).
Угловое перемещение рычага 12 (его конца 20) обеспечивает угловой поворот (угол β фиг.1,4) чувствительного элемента 11 дополнительного датчика 10, который вырабатывает пропорциональный электрический сигнал, передаваемый через электросоединитель 27 с кабелем 28 на контрольно-записывающую регистрирующую аппаратуру 5 в фюзеляже 3 летательного аппарата.
Изобретение относится к авиации, в частности к оборудованию системы бортовых измерений. Цель - расширение эксплуатационных возможностей за счет обеспечения возможности контроля угла установки стабилизатора в течение всего полета летательного аппарата. Устройство для контроля угла α установки стабилизатора 1 летательного аппарата 4 содержит дополнительную измерительную аппаратуру 5, расположенную в фюзеляже 3 с продольной осью 30, при этом стабилизатор 1 расположен на оси 2, хорда 6 крыла размещена под углом j, а хорда 7 стабилизатора 1 с помощью привода 8 выводится на определенный угол и фиксируется с помощью датчика с кабелем 28, установленного на кронштейне 9 при набегающем потоке со скоростью V. Кроме аппаратуры 5 на летательном аппарате 4 имеется штатная измерительная аппаратура 31 ("черный ящик"). 5 ил.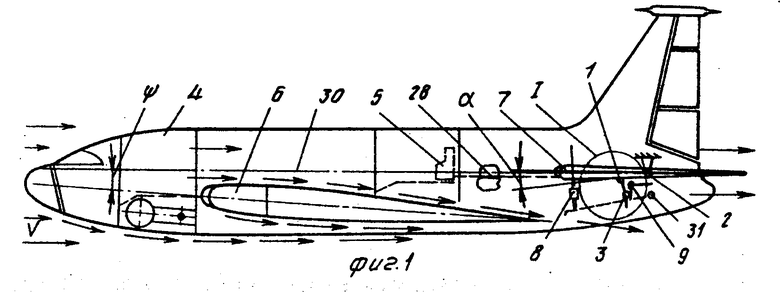
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УГЛА УСТАНОВКИ СТАБИЛИЗАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее установленную на летательном аппарате штатную измерительную систему с основным датчиком угла отклонения стабилизатора, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения возможности контроля угла установки стабилизатора в течение всего полета летательного аппарата, оно снабжено дополнительным датчиком угла отклонения стабилизатора, установленным с помощью кронштейна на фюзеляже летательного аппарата и кинематически связанным с основным датчиком, и дополнительной измерительной аппаратурой, установленной на фюзеляже летательного аппарата и электрически связанной с дополнительным датчиком.
| СЪЕМНЫЙ ПРЕДОХРАНИТЕЛЬ ПЛАТЬЯ | 1922 |
|
SU617A1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| КАБЕЛЬНЫЙ РАСПРЕДЕЛИТЕЛЬНЫЙ ЯЩИК | 1925 |
|
SU6327A1 |
