Изобретение относится к электроприводам на основе электродвигателя с ограни- ченным углом поворота ротора и может найти применение, в частности, в лазерной технике для углового перемещения зеркала при позиционировании луча.
Целью изобретения является повышение точности позиционирования ротора электродвигателя.
о Поставленная цель достигается тем, что в электропривод, содержащий электродвигатель, имеющий статор с обмоткой и посто- янными магнитами, установленный в подшипниках полый ротор, внутри которого размещен упругий элемент, одним концом неподвижно соединенный со статором, а другим - с ротором, емкостный датчик, подвижной общей обкладкой которого является часть ротора, а первая и вторая неподвижные обкладки выполнены каждая в виде двух одинаковых элементов внутренней поверхности соосного с ротором полого металлического цилиндра, разделенных изолирующими зазорами по образующей цилиндра, причем элементы каждой обкладки электрически объединены и расположены симметрично относительно оси цилиндра, подвижная общая обкладка выполнена с нормальным сечением, имеющим две взаимно перпендикулярные оси симметрии и ограниченным частью окружности, центр которой совпадает с точкой пересечения осей симметрии, и двумя ее равными хордами, первая ось симметрии сечения, параллельная хордам, в исходном положении подвижной общей обкладки проходит через середины зазоров, генератор, задатчика сигнала позиции, первый преобразователь, реализующий функцию вида Fi 2,22Af(), где Cxi - емкость воздушного конденсатора, образованного подвижным общим электродом и первой неподвижной обкладкой емкостного датчика, Сх2 - емкость воздушного конденсатора, образованного подвижным общим электродом и второй неподвижной обкладкой емкостного датчика, один вход которого соединен с выходом генератора, второй и третий входы первого преобразователя емкости подключены соответственно к первой и второй неподвижной обкладкам емкостного датчика, а выход первого преобразователя емкости соединен с одним входом дифференциального усилителя, выходы которого соединены с обмотками электродвигателя, введены перемножитель и второй преобразователь, а в емкостный датчик введена третья неподвижная обкладка, выполненная в виде двух электрически соединенных противолежащих элементов внутренней поверхности цилиндра, ограниченных изолирующими
зазорами по образующей цилиндра, а подвижная общая обкладка выполнена с нормальным сечением, дополнительно ограниченным частью окружности и второй
парой ее равных хорд, параллельных второй оси симметрии, которая в исходной позиции подвижной общей проходит через середины элементов третьей неподвижной обкладки, второй выход генератора соединен с первым входом второго преобразователя, второй вход которого соединен с третьей неподвижной обкладкой емкостного датчика, выход второго преобразователя соединен с первым входом перемножителя,
5 второй вход которого соединен с выходом задатчика сигнала позиции, выход перемножителя соединен с другим входом первого преобразователя, а второй преобразователь реализует функцию вида
0
.22AfCx3 .
где А - амплитуда высокочастотного сигнала, поступающего с выхода генератора;
f - частота высокочастотного сигнала, поступающего с выхода генератора;
Схз - емкость воздушного конденсатора, образованного подвижным общим электродом и третьей неподвижной обкладкой емкостного датчика.
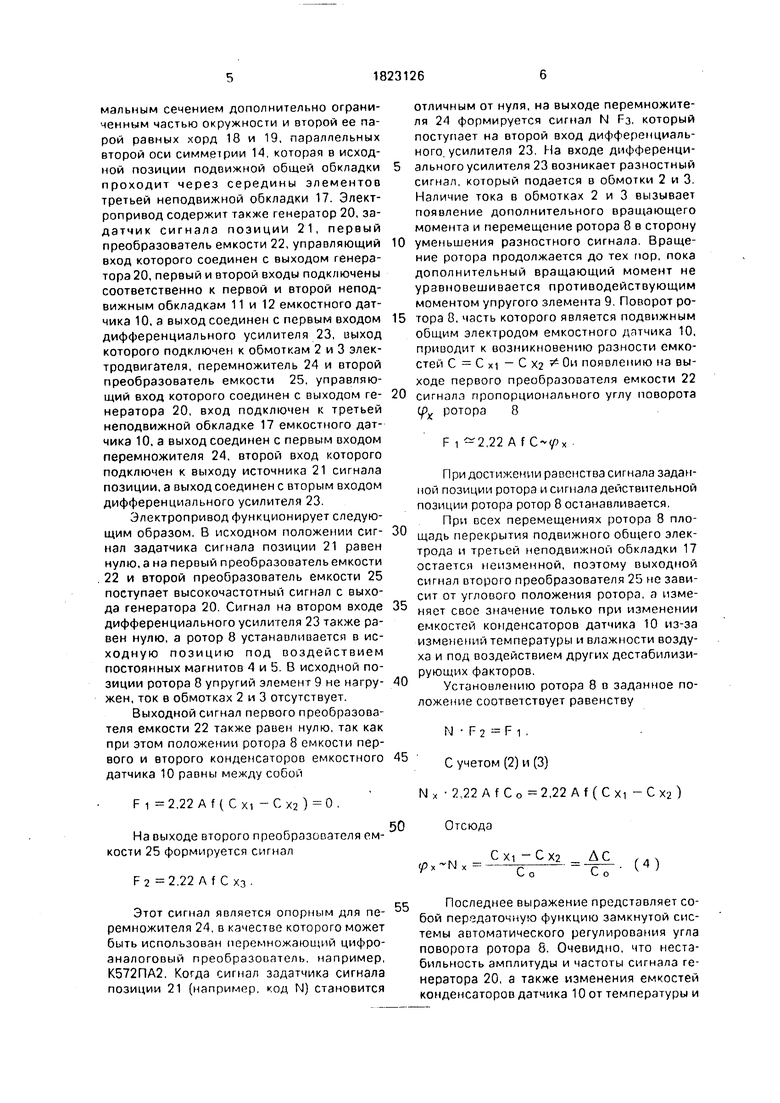
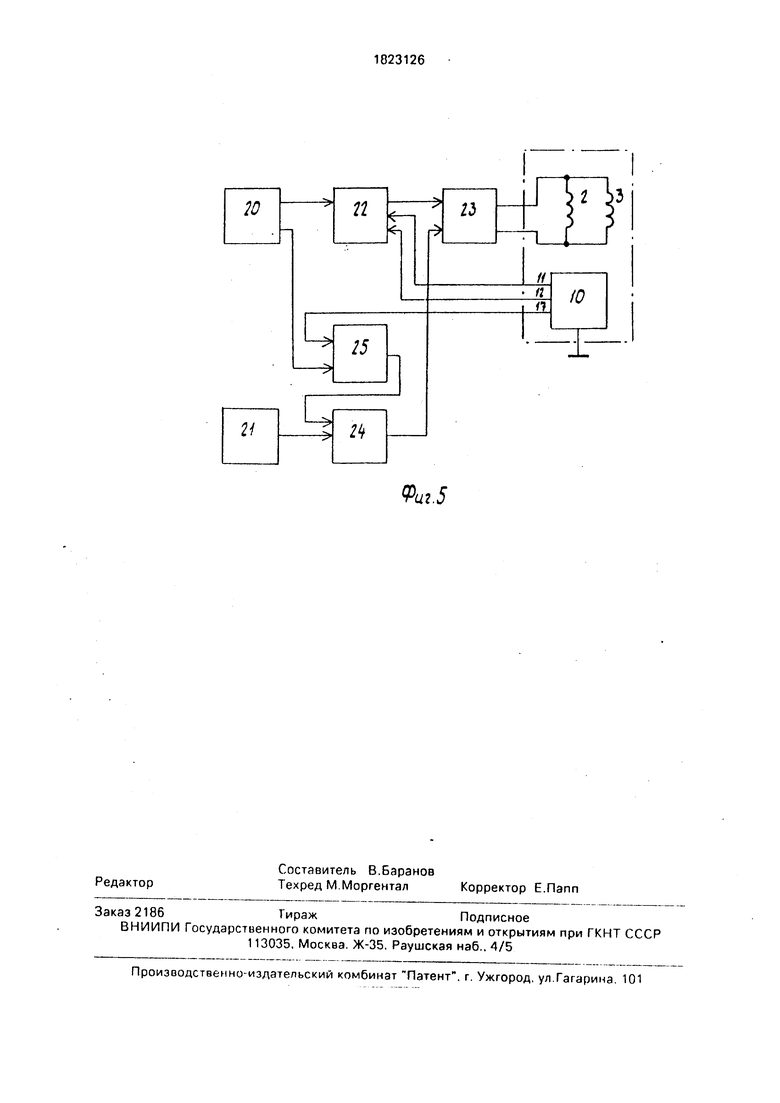
На фиг.1 приведен продольный разрез электродвигателя; на фиг.2 - разрез А-А; на фиг.З- разрез Б-Б; нафиг.4 -электрическая схема емкостного датчика; на фиг.5 - функциональная схема электропривода.
Злектропривод состоит из электродвигателя, который содержит статор 1 с обмотками 2 и 3 и постоянными магнитами 4 и 5, подшипники 6 и 7, ротор 8, упругий элемент
9, емкостный датчик 10, подвижной общей обкладкой является ротор 8, с первой и второй неподвижными обкладками 11 и 12. Подвижная общая обкладка выполнена с нормальным сечением, имеющим две вза$ имнс- перпендикулярные оси симметрии 13 и 14 и ограниченным частью окружности, центр которой совпадает с точкой пересечения осей симметрии 13 и 14, и двумя равными ее хордами 15 и 16, первая ось
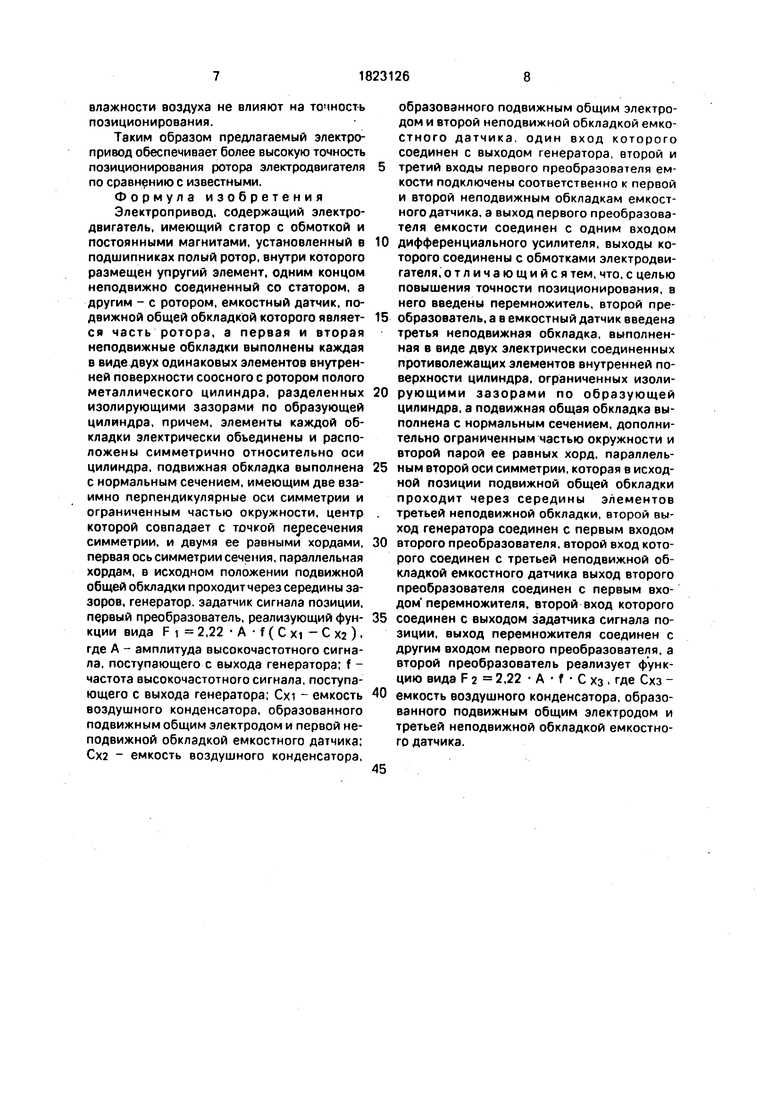
0 симметрии 13, параллельная хордам 15 и 16 в исходном положении подвижной общей обкладки, проходит через середины зазоров. Третья неподвижная обкладка 17 емкостного датчика 10 выполнена в виде двух электрически соединенных противолежа- UIHX элементов внутренней поверхности цилиндра, ограниченных изолирующими зазорами по образующей цилиндра, а подвижная общая обкладка выполнена с нор0
5
5
мальным сечением дополнительно ограниченным частью окружности и второй ее парой равных хорд 18 и 19, параллельных второй оси симметрии 14, которая в исходной позиции подвижной общей обкладки проходит через середины элементов третьей неподвижной обкладки 17. Электропривод содержит также генератор 20, за- датчик сигнала позиции 21, первый преобразователь емкости 22, управляющий вход которого соединен с выходом генератора 20, первый и второй входы подключены соответственно к первой и второй неподвижным обкладкам 11 и 12 емкостного датчика 10, а выход соединен с первым входом дифференциального усилителя 23, выход которого подключен к обмоткам 2 и 3 электродвигателя, перемножитель 24 и второй преобразователь емкости 25, управляющий вход которого соединен с выходом ге- нератора 20, вход подключен к третьей неподвижной обкладке 17 емкостного датчика 10, а выход соединен с первым входом перемножителя 24, второй вход которого подключен к выходу источника 21 сигнала позиции, а выход соединен с вторым входом дифференциального усилителя 23.
Электропривод функционирует следующим образом. В исходном положении сиг- нал задатчика сигнала позиции 21 равен нулю, а на первый преобразовательемкости 22 и второй преобразователь емкости 25 поступает высокочастотный сигнал с выхода генератора 20. Сигнал на втором входе дифференциального усилителя 23 также равен нулю, а ротор 8 устанавливается в исходную позицию под воздействием постоянных магнитов 4 и 5. В исходной позиции ротора 8 упругий элемент 9 не нагру- жен, ток в обмотках 2 и 3 отсутствует.
Выходной сигнал первого преобразователя емкости 22 также равен нулю, так как при этом положении ротора 8 емкости первого и второго конденсаторов емкостного датчика 10 равны между собой
F 2.22 Af ( Cxi -Cx2) 0.
На выходе второго преобразователя емкости 25 формируется сигнал
Рз 2.22 Af С хз
отличным от нуля, на выходе перемножителя 24 формируется сигнал N РЗ, который поступает на второй вход дифференциального, усилителя 23. На входе дифференциального усилителя 23 возникает разностный сигнал, который подается в обмотки 2 и 3. Наличие тока в обмотках 2 и 3 вызывает появление дополнительного вращающего момента и перемещение ротора 8 в сторону уменьшения разностного сигнала. Вращение ротора продолжается до тех пор, пока дополнительный вращающий момент не уравновешивается противодействующим моментом упругого элемента 9. Поворот ротора 8, часть которого является подвижным общим электродом емкостного датчика 10, приводит к возникновению разности емкостей С С xi - С Х2 Ои появлению на выходе первого преобразователя емкости 22 сигнала пропорционального углу поворота (рх ротора 8
F 1 -2,22 Af
При достижении равенства сигнала заданной позиции ротора и сигнала действительной позиции ротора ротор 8 останавливается.
При всех перемещениях ротора 8 площадь перекрытия подвижного общего электрода и третьей неподвижной обкладки 17 остается неизменной, поэтому выходной сигнал второго преобразователя 25 не зависит от углового положения ротора, а изменяет свое значение только при изменении емкостей конденсаторов датчика 10 из-за изменений температуры и влажности воздуха и под воздействием других дестабилизирующих факторов.
Установлению ротора 8 в заданное положение соответствует равенству
N F2 F i . С учетом (2) и (3) N х 2.22 A f С о 2,22 A f ( С xi - С х2 )
50
Отсюда
i/З х N х -
С xi - Сх2 ДС
Со
И)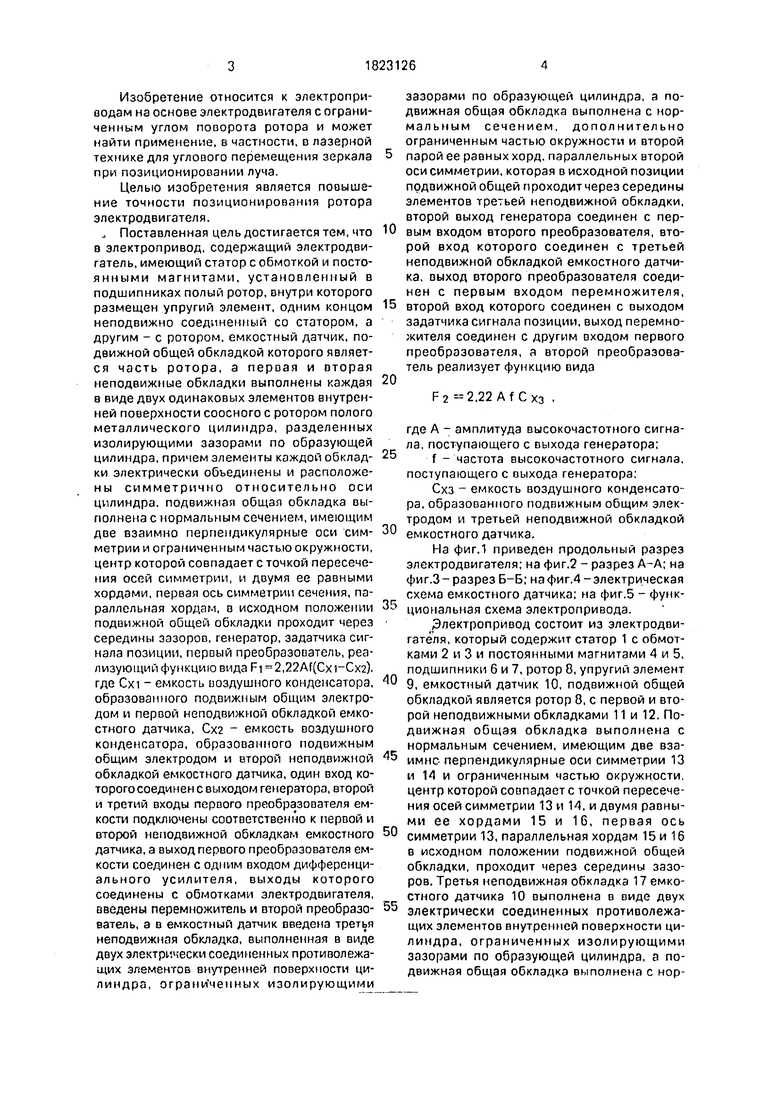
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель | 1991 |
|
SU1814161A1 |
| Датчик положения ротора вентильного электродвигателя | 1981 |
|
SU1023563A1 |
| Емкостный преобразователь угловых перемещений | 1989 |
|
SU1732143A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Преобразователь емкости датчика | 1989 |
|
SU1711094A1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| ЕМКОСТНЫЙ КОМПЕНСАЦИОННЫЙ УРОВНЕМЕР | 1999 |
|
RU2166736C2 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2088042C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
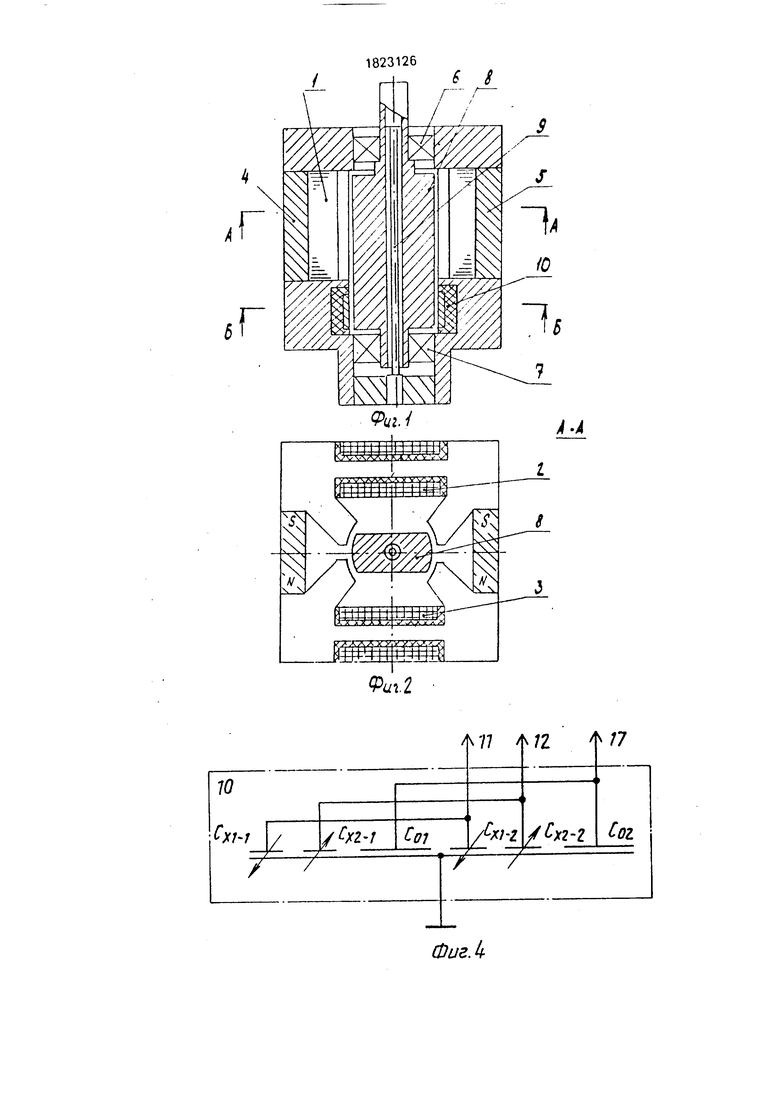
Использование: в лазерной технике для точного и быстрого поворота зеркала по заданному закону. Сущность изобретения: электродвигатель содержит статор с обмоткой и постоянными магнитами, полый ро15 И тор, внутри которого размещен упругий элемент, одним концом неподвижно соединенный со статором, а другим - с ротором (8). емкостный датчик, подвижная общая обкладка которого является частью ротора (8) и выполнена с нормальным сечением, ограниченным частью окружности и двумя парами равных хорд, а три неподвижные обкладки (11, 12, 17) являются элементами соосного с ротором полого металлического цилиндра. На точность позиционирования ротора (8) не влияют нестабильность амплитуды и частоты генератора устройства управления, а также изменения емкостей конденсаторов датчика от температуры и влажности. 5 ил. 13 8 /216 Ё 00 ю GJ ГО О Фие.З
Этот сигнал является опорным для пе- ремножителя 24, в качестве которого может быть использован перемножающий цифро- аналоговый преобразователь, например, К572ПА2. Когда сигнал задатчика сигнала позиции 21 (например, код N) становится
Последнее выражение представляет собой передаточную функцию замкнутой системы автоматического регулирования угла поворота ротора 8. Очевидно, что нестабильность амплитуды и частоты сигнала генератора 20, а также изменения емкостей конденсаторов датчика 10 от температуры и
влажности воздуха не влияют на точность позиционирования.
Таким образом предлагаемый электропривод обеспечивает более высокую точность позиционирования ротора электродвигателя по сравнению с известными.
Формула изобретения Электропривод, содержащий электродвигатель, имеющий статор с обмоткой и постоянными магнитами, установленный в подшипниках полый ротор, внутри которого размещен упругий элемент, одним концом неподвижно соединенный со статором, а другим - с ротором, емкостный датчик, подвижной общей обкладкой которого является часть ротора, а первая и вторая неподвижные обкладки выполнены каждая в виде двух одинаковых элементов внутренней поверхности соосного с ротором полого металлического цилиндра, разделенных изолирующими зазорами по образующей цилиндра, причем, элементы каждой обкладки электрически объединены и расположены симметрично относительно оси цилиндра, подвижная обкладка выполнена с нормальным сечением, имеющим две взаимно перпендикулярные оси симметрии и ограниченным частью окружности, центр которой совпадает с точкой пересечения симметрии, и двумя ее равными хордами, первая ось симметрии сечения, параллельная хордам, в исходном положении подвижной общей обкладки проходит через середины зазоров, генератор, за датчик сигнала позиции, первый преобразователь, реализующий функции вида F 1 2,22 А f ( С xi - С хз ) . где А - амплитуда высокочастотного сигнала, поступающего с выхода генератора; f - частота высокочастотного сигнала, поступающего с выхода генератора; Cxi - емкость воздушного конденсатора, образованного подвижным общим электродом и первой неподвижной обкладкой емкостного датчика; Сх2 - емкость воздушного конденсатора,
образованного подвижным общим электродом и второй неподвижной обкладкой емкостного датчика, один вход которого соединен с выходом генератора, второй и
третий входы первого преобразователя емкости подключены соответственно к первой и второй неподвижным обкладкам емкостного датчика, а выход первого преобразователя емкости соединен с одним входом
дифференциального усилителя, выходы которого соединены с обмотками электродвигателя, отличающийся тем, что, с целью повышения точности позиционирования, в него введены перемножитель, второй преобразователь, а в емкостный датчик введена третья неподвижная обкладка, выполненная в виде двух электрически соединенных противолежащих элементов внутренней поверхности цилиндра, ограниченных изолирующими зазорами по образующей цилиндра, а подвижная общая обкладка выполнена с нормальным сечением, дополнительно ограниченным частью окружности и второй парой ее равных хорд, параллельным второй оси симметрии, которая в исходной позиции подвижной общей обкладки проходит через середины элементов третьей неподвижной обкладки, второй выход генератора соединен с первым входом
второго преобразователя, второй вход которого соединен с третьей неподвижной обкладкой емкостного датчика выход второго преобразователя соединен с первым входом перемножителя, второй вход которого
соединен с выходом задатчика сигнала позиции, выход перемножителя соединен с другим входом первого преобразователя, а второй преобразователь реализует функцию вида F 2 2,22 А f С хз . где Схз емкость воздушного конденсатора, образованного подвижным общим электродом и третьей неподвижной обкладкой емкостного датчика.
ч г
k
I
Риг.5
| Патент США N: 4142144 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
