обкладкой датчика является часть ротора, а две неподвижные обкладки 11.12 выполнены в виде двух групп одинаковых элементов (по четыре элемента в каждой группе) соос- ного с ротором полого металлического цилиндра. При этом ротор в пределах дифференциального емкостного датчика выполнен с нормальным сечением, ограниченным частью окружности и двумя парами
равных, взаимно перпендикулярных, а в парах параллельных хорд. При нахождении ротора 8 в любом положении, кроме исходного, через обмотку управления протекает ток тем больший, чем больше угол его отклонения от исходного положения и выше жесткость упругого элемента 9, которая обеспечивает требуемое быстродействие. 4 ил.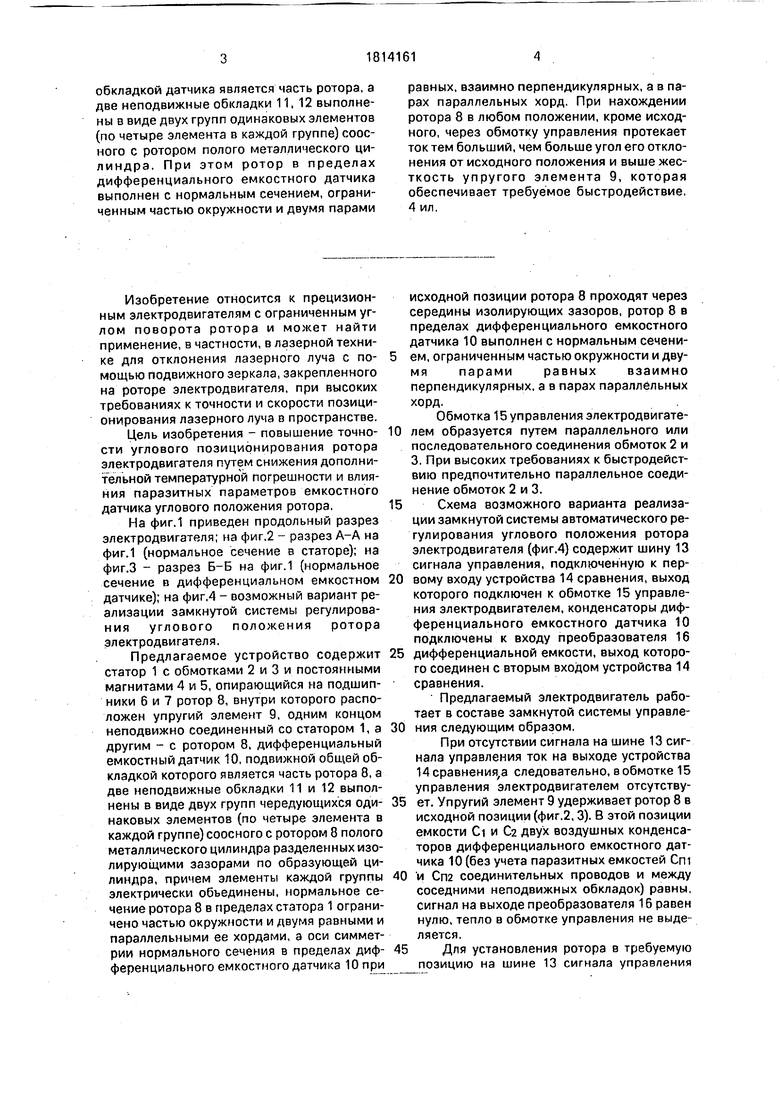
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1991 |
|
SU1823126A1 |
| СИСТЕМА ОТСЧЕТА ТОЧНОГО ВРЕМЕНИ | 1987 |
|
SU1840350A1 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
| ДАТЧИК НУЛЕВОГО ПОЛОЖЕНИЯ | 1973 |
|
SU397743A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| Емкостный преобразователь угловых перемещений | 1989 |
|
SU1732143A1 |
| Датчик положения ротора вентильного электродвигателя | 1981 |
|
SU1023563A1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТОГО ПРОДУКТА | 1991 |
|
RU2038437C1 |
| Емкостной датчик положения ротора вентильного электродвигателя | 1976 |
|
SU605291A1 |
Использование: в лазерной технике для отклонения лазерного луча с помощью Подвижного зеркала, закрепленного на роторе электродвигателя. Сущность изобретения: электродвигатель содержит статор 1 d обмотками управления и двумя постоянными магнитами 4, 5, ротор 8, внутри которого, расположен упругий элемент 9, одним концом неподвижно соединенный со статором 1, а другим - с ротором 8, и дифференциальный емкостный датчик, Общей подвижной
Изобретение относится к прецизионным электродвигателям с ограниченным углом поворота ротора и может найти применение, в частности, в лазерной технике для отклонения лазерного луча с помощью подвижного зеркала, закрепленного на роторе электродвигателя, при высоких требованиях к точности и скорости позиционирования лазерного луча в пространстве.
Цель изобретения - повышение точности углового позиционирования ротора электродвигателя путем снижения дополнительной температурной погрешности и влияния паразитных параметров емкостного датчика углового положения ротора.
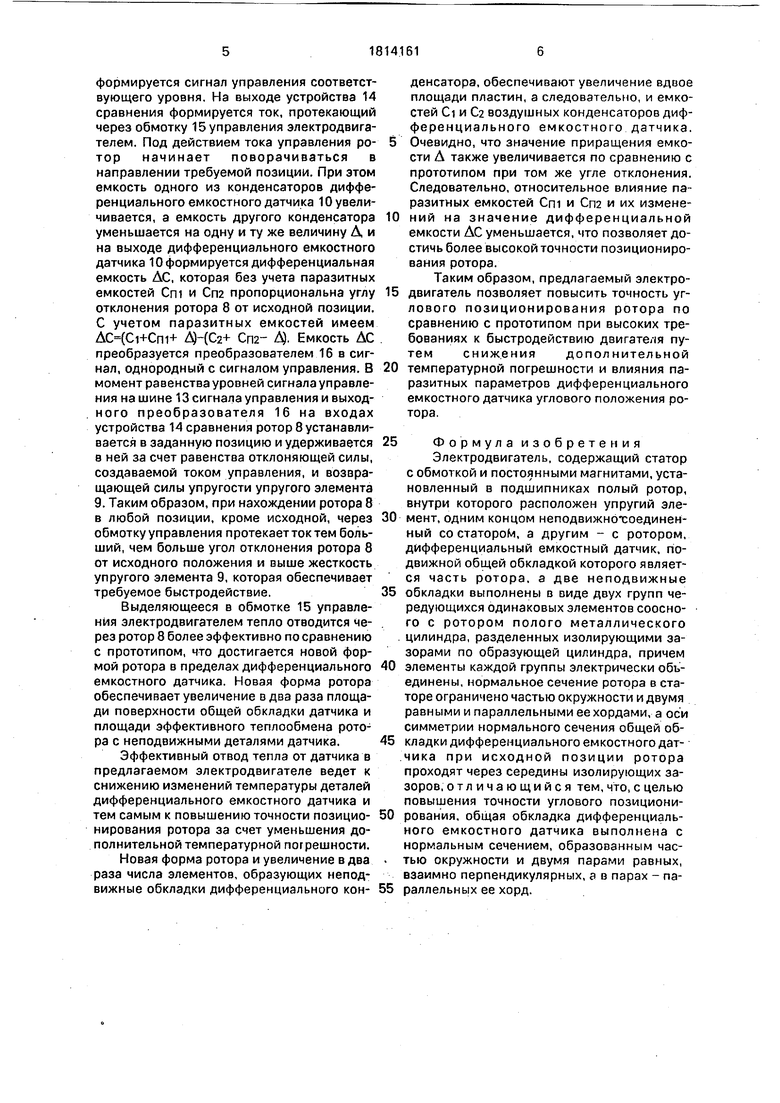
На фиг.1 приведен продольный разрез электродвигателя; на фиг.2 - разрез А-А на фиг.1 (нормальное сечение в статоре); на фиг.З - разрез Б-Б на фиг.1 (нормальное сечение в дифференциальном емкостном датчике); на фиг,4 - возможный вариант реализации замкнутой системы регулирования углового положения ротора электродвигателя.
Предлагаемое устройство содержит статор 1 с обмотками 2 и 3 и постоянными магнитами 4 и 5, опирающийся на подшипники 6 и 7 ротор 8, внутри которого расположен упругий элемент 9, одним концом неподвижно соединенный со статором 1, а другим - с ротором 8, дифференциальный емкостный датчик 10, подвижной общей обкладкой которого является часть ротора 8, а две неподвижные обкладки 11 и 12 выполнены в виде двух групп чередующихся одинаковых элементов (по четыре элемента в каждой группе) соосного с ротором 8 полого металлического цилиндра разделенных изолирующими зазорами по образующей цилиндра, причем элементы каждой группы электрически объединены, нормальное сечение ротора 8 в пределах статора 1 ограничено частью окружности и двумя равными и параллельными ее хордами, а оси симметрии нормального сечения в пределах дифференциального емкостного датчика 10 при
исходной позиции ротора 8 проходят через середины изолирующих зазоров, ротор 8 в пределах дифференциального емкостного датчика 10 выполнен с нормальным сечением, ограниченным частью окружности и двумя парами равных взаимно перпендикулярных, а в парах параллельных хорд.
Обмотка 15 управления электродвигателем образуется путем параллельного или последовательного соединения обмоток 2 и 3. При высоких требованиях к быстродействию предпочтительно параллельное соединение обмоток 2 и 3.
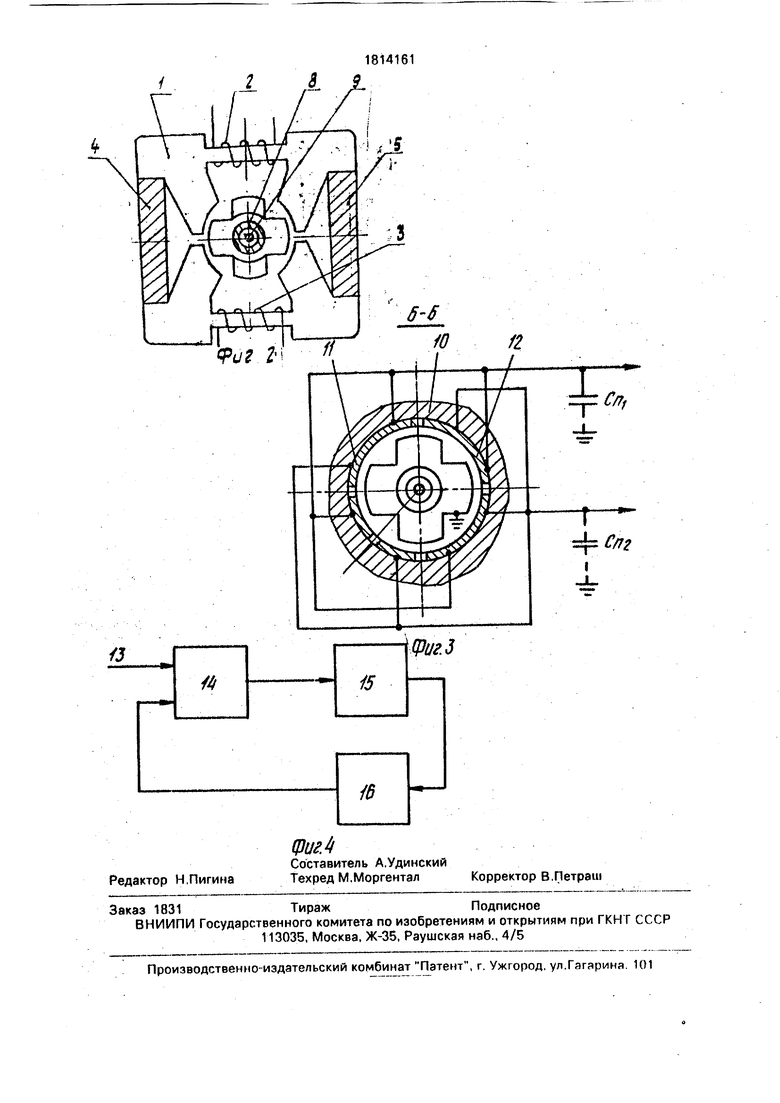
Схема возможного варианта реализации замкнутой системы автоматического регулирования углового положения ротора электродвигателя (фиг.4) содержит шину 13 сигнала управления, подключенную к первому входу устройства 14 сравнения, выход которого подключен к обмотке 15 управления электродвигателем, конденсаторы дифференциального емкостного датчика 10 подключены к входу преобразователя 16
дифференциальной емкости, выход которого соединен с вторым входом устройства 14 сравнения.
Предлагаемый электродвигатель работает в составе замкнутой системы управления следующим образом.
При отсутствии сигнала на шине 13 сигнала управления ток на выходе устройства 14 сравнения следовательно, в обмотке 15 управления электродвигателем отсутствует. Упругий элемент 9 удерживает ротор 8 в исходной позиции (фиг.2,3). В этой позиции емкости Ci и С2 двух воздушных конденсаторов дифференциального емкостного датчика 10 (без учета паразитных емкостей Cm
и Спз соединительных проводов и между соседними неподвижных обкладок) равны, сигнал на выходе преобразователя 16 равен нулю, тепло в обмотке управления не выделяется.
Для установления ротора в требуемую позицию на шине 13 сигнала управления
формируется сигнал управления соответствующего уровня. На выходе устройства 14 сравнения формируется ток, протекающий через обмотку 15 управления электродвигателем. Под действием тока управления ротор начинает поворачиваться в направлении требуемой позиции. При этом емкость одного из конденсаторов дифференциального емкостного датчика 10 увеличивается, а емкость другого конденсатора уменьшается на одну и ту же величину Д и на выходе дифференциального емкостного датчика 10 формируется дифференциальная емкость АС, которая без учета паразитных емкостей Cm и Cm пропорциональна углу отклонения ротора 8 от исходной позиции. С учетом паразитных емкостей имеем AC(Ci+Cm+ A)-(Ca+ Cm- А). Емкость АС преобразуется преобразователем 16 в сигнал, однородный с сигналом управления. В момент равенства уровней сигнала управления на шине 13 сигнала управления и выходного преобразователя 16 на входах устройства 14 сравнения ротор 8 устанавливается в заданную позицию и удерживается в ней за счет равенства отклоняющей силы, создаваемой током управления, и возвращающей силы упругости упругого элемента 9. Таким образом, при нахождении ротора 8 в любой позиции, кроме исходной, через обмотку управления протекает ток тем больший, чем больше угол отклонения ротора 8 от исходного положения и выше жесткость упругого элемента 9, которая обеспечивает требуемое быстродействие.
Выделяющееся в обмотке 15 управления электродвигателем тепло отводится через ротор 8 более эффективно по сравнению с прототипом, что достигается новой формой ротора в пределах дифференциального емкостного датчика. Новая форма ротора обеспечивает увеличение в два раза площади поверхности общей обкладки датчика и площади эффективного теплообмена ротора с неподвижными деталями датчика.
Эффективный отвод тепла от датчика в предлагаемом электродвигателе ведет к снижению изменений температуры деталей дифференциального емкостного датчика и тем самым к повышению точности позиционирования ротора за счет уменьшения дополнительной температурной погрешности.
Новая форма ротора и увеличение в два раза числа элементов, образующих неподвижные обкладки дифференциального конденсатора, обеспечивают увеличение вдвое площади пластин, а следовательно, и емкостей Ci и С2 воздушных конденсаторов дифференциального емкостного датчика.
Очевидно, что значение приращения емкости А также увеличивается по сравнению с прототипом при том же угле отклонения. Следовательно, относительное влияние паразитных емкостей Cm и Сп2 и их изменений на значение дифференциальной емкости АС уменьшается, что позволяет достичь более высокой точности позиционирования ротора.
Таким образом, предлагаемый электродвигатель позволяет повысить точность углового позиционирования ротора по сравнению с прототипом при высоких требованиях к быстродействию двигателя путем снижения дополнительной
температурной погрешности и влияния паразитных параметров дифференциального емкостного датчика углового положения ротора.
Фор мула изобретения
Электродвигатель, содержащий статор с обмоткой и постоянными магнитами, установленный в подшипниках полый ротор, внутри которого расположен упругий элемент, одним концом неподвижнотоединен- ный со статором, а другим - с ротором, дифференциальный емкостный датчик, подвижной общей обкладкой которого является часть ротора, а две неподвижные
обкладки выполнены в виде двух групп чередующихся одинаковых элементов соосно- го с ротором полого металлического цилиндра, разделенных изолирующими зазорами по образующей цилиндра, причем
элементы каждой группы электрически объединены, нормальное сечение ротора в статоре ограничено частью окружности и двумя равными и параллельными ее хордами, а оси симметрии нормального сечения общей обкладки дифференциального емкостного дат- чика при исходной позиции ротора проходят через середины изолирующих зазоров, от л ичающийся тем,что,с целью повышения точности углового позиционирования, общая обкладка дифференциального емкостного датчика выполнена с нормальным сечением, образованным частью окружности и двумя парами равных, взаимно перпендикулярных, а в парах - параллельных ее хорд.
Редактор Н.Пигина
Фиг.4
Составитель А.Удинский
Техред М.МоргенталКорректор В.Петраш
| Патент США № 3624574, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4135119, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
