Данное изобретение относится к устройствам для регистрации кривых измеряемых параметров.
Автоматические газокаротажные станции регистрируют кривые изменения параметров, измеряемых при газовом каротаже скважин,, в функции времени. Затем оператору станции, приходится вручную строить кривые, показывающие изменение этих параметров в функции глубины сквал нны. Это требует значительного времени, создает возможность субъективных ошибок и, главное, затрудняет использование зарегистрированных кривых для оперативной интерпретации данных газового каротажа. Поэтому одной из важных задач,. возникающих ири разработке автоматических газокаротажных станций, является задача регистрации всех параметров газового каротажа в функции глубин: в функции истинных глубин с учетом величины «отставания (суммарные газопоказания, интенсивность люминесценции, физические свойства бурового раствора и т. п.), для которых глубина забоя скважины, показываемая глубиномером станции в момент регистрации значения параметра, не совпадает с глубиной, к которой это значение должно быть отнесено; в функции действующих глубин для параметров, связанных с режимом бурения скважины (скорость проходки, коэффициент разбавления, расхо,д бурового раствора и т. п.), для которых показания глубиномера в момент регистрации значения параметров совнадают с глубиной, к которой относится это значение параметра.
Регнстратор данной конструкции предназначен для регистрации в фуикции глубины кривых днскретно измеряемых параметров.
Регистратор выполнен на базе общетехнического электронного самоннщущего потенциометра с приводом лентопротяжного механизма от электромагнитного щагового двигателя.
Для регистрации нескольких параметров применяется многоточечный электронный самопишущий потенциометр, для регистрации одного параметра - одноточечный.
Регистратор позволяет производить регистрацию практически неограниченного количества параметров в функции глубин, измеряемых днскретно через определенный щаг квантования по глубинам, что достигается благодаря наличию в нем:
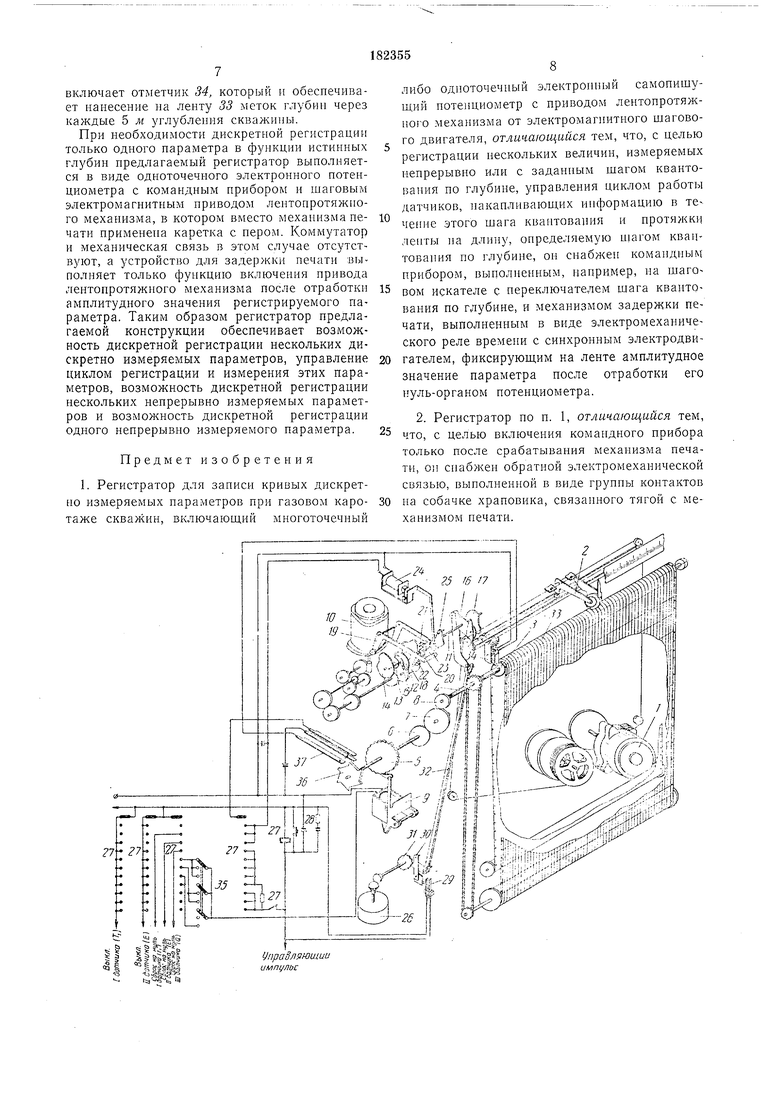
а)командного прибора, включаемого по сигналам действующих глубин и последовательно осуществляющего при переходе с одной позпции на другую управление циклом работы датчиков, накапливающих информацию в течение щага квантования; плитудное значение параметра только после обработкп его нуль-органом потенциометра; в) обратной электромеханической связи, выполненной в виде группы контактов на собачке храповнка, связанного тягой с механнзмом печати, п обеспечнваюн.1,ей включение niaгового искателя только после срабатывания механизма нечати потенциометра. На чертеже показана электрокинематнческая схема данного регистратора в случае, когда одним pei-ncTpnpyroau-iM прибором должна нроизводиться регистрация в функции глубин кривых нескольких параметров, измеряемых дпскретио через определеппый шаг кваптовання но глубине. Регистратор выполнен в виде многоточечного электронного самопишущего потенциометра с нуль-органом обычного типа, балансирпым электродвигателем 1, перемегцаюшим миоготочечпую каретку 2, лентопротяжным мехапнзмом, выполненным па ведущем барабапе 3, ось которого 4 связана через храповое устройство 5 и шестерии 6, 7 п 8 с электромагнитным шаговым двигателем 9 п мехаппз: юм управления печатью с устройством для задержки механизма печати. Устройство для задержки мехаппзма печати приводится от сиихронпого электродвигателя 10 и включает ось )/, на которой размешены: шестерня 12 с двухзубым храповиком 13, кулачком 14, собачкой 15, прижатой к храповику ./5 пружппой (па чертеже не показапа), };улачкп 16, 17 и 18, траверса 19, на которой укреплены вилка 20 п качалка 2/ с роликом 22. Вилка 20 посажена на оси 23. Включепие механизма задержки производится с помошью электромагпита 24 с флажкод 25. На входе потенциометра разметен коммутатор 26. Для уцравлеиия цпкло.м измерения и регистрации параметров регистратор снабжеп командным прибором, собранным на шаговом искателе 27, которьи в начале измерений с цомошью кнопкп 28 (или автоматически) устанавливается в псходпое положеиие. Для подачи импульса па шаговый искатель 27 в люмент печати применена система механической обратной связи, которая выполиена в виде контактов 29 па собачке 30 храповика 31, связанного тягой 32 с механизмом печати. Такая система обеспечивает очередное включеиие шагового искателя 27 только после срабатывапия механнзма нечатп. Для облегче1П1Я прнвязки регистрируемых параметров к глубиие и панесения па ленту 33 меток глубпп через р.ыбранцый шаг квантования по глубине в регистраторе имеется отметчпк меток глубин 34. Для изменения шага квантования по глубинам (Я,. 0,25, 0,5 пли 1 м) служит нерёключатель 55, так как величина шага квантования по глубпиам может быть различной, необходнма пересчетпая схема, обеспечиваюстема иредставлепа кулачком 36 с контактной группой 37. Устройство работает следующим образом. Допустим регистрируются в функции глубины параметры, связанные с режимом бурения скважииы: время бурения одного метра скваЖ1Ц1Ы TI - , коэффициент разбавлеппя Е, б расход бурового раствора па выходе скважпиы Qowv, которые определяются дискретно датчиками, работаюшимп но схеме накопления информации за тот же шаг квантования по глубипе Я,, через который производится регистрация измеряемых параметров, или через какой-либо ноетояпный шаг квантования по времени Т, который должеи быть меиьше мииимальпого времеии Т„,. бурения интервала Я,. )Г„,.Для сиятия показаний с такого датчика его падо предварительно включить и иосле спятия показаний сбросить на пуль и запустить па следующий цикл измереиия. В пачале пзмерений автоматически или с помощью кнопки 28 шаговый искатель 27 устанавливается в исходное полол :ение. В этом ноложепии датчики для определения Т, Е п Qg.. включены п к пуль-органу потецциометра через коммутатор 26 подключен датчик для определеиия Д. При этом пуль-орган потенп,иометра иепрерывпо отрабатывает зпачепие параметра. 7i, перемещая каретку 2. При иолучении сигнала действующих глубин через выбранный шаг квантования Я шаговый искатель 27 нереходит во второе положение. При этом остапавливается датчик, оиределяющий TI, и срабатывает электромагнит 24, включающий через устройство для задержки механизм иечати, с помощью которого каретка 2 иаиосит иа ленту 33 амилитудное значение параметра Т, в виде точки синдексом «1. После нанесения на ленту значения 7 механизм печати с по.мощью тяги 32, собачки 30 и храповика 5/ переключает коммутатор 26, который подключает к иуль-оргапу иотеициометра датчик для определеппя параметра Е. Одновременно с помощью контактной грунпы 29 на собачке 30 подается импульс напряжения па обмотку шагового искателя 27, который переходит в третье положепие. В этом ноложеиии шагового искателя подается команда на возврат в исходное поломнение датчика для определения Т, подается команда на остановку датчика для определеппя Е и через устройство для задержки (электро.маппгг 24 остается вклйчеиным) механизм нечатп с помошью каретки 2 наносит на ленту 33 амплитудное значение параметра Е в впде точки с индексом «2. После регистрации значения Е коммутатор 26 подключает к нуль-органу потенциометра датчик для определеиия Qe,,,- п с помощью коитактной группы 29 подает панрял епие на обмотку HjaroBoro искателя 27, переводя его в четвертое положепие. В этом положении шагового искателя подаются комапды, по котовый цикл счета, датчик величииы Е возвращается в исходное положение, а значение параметра Qewr срабатывается нуль-органом потенциометра и фиксируется па ленте 33 в виде точки с индексом «3. После регистрации Qg,, коммутатор 26 устапавлнвается в исходное иоложение, снова подключая к нуль-оргапу потенциометра датчик для определения Т и с помощью контактной грунны 29 подается импульс напряжения для перевода шагового пскателя в пятое положение.
В этом положении щагового искателя производится включение датчика для определения Е на новый цикл счета и возвращение в исходное положение датчика для определения Qgax Дальнейщее передвижение щагового искателя 27 производится автоматически до прихода в исходное положение датчика при определении. При перемещеини искателя в последующие положения происходит подача импульсов на электромагнитный щаговый двигатель 9, нри каждом срабатывании которого лента 33 протягивается на определенную дли,ну (нанример, лрн масштабе глубин 1:200 и минимальном щаге квантоваппя //,. 0,25 м па 1,25 мм). С помощью переключателя 35 учитывается величипа применяемого щага кваптовапия Я.. Например, при масштабе глубин 1 : 200 и Н, 0,25 м па щаговый двигатель 9 подается один импульс и лента перемеп ается на 1,25 мм, нри Я. 0,5 м или 1 м соответственно подается 2 или 4 импульса и лента перемешается на 2,5 или 5 мм. Таким образом за один цикл регистрации производится последовательное панесеиие па неподвижную ленту всех амплитудиых значений измеряемых параметров и перемещеиие ленты на длипу /,., величипа которой зависит от шага квантования но глубииам Я„ и масштаба глубин.
Устройство для задержки механизма печати работает следующим образом.
Устройство приводится в действие от синхронного электродвигателя 10. В результате сцеплепия шестерни 12 с осью // через зуб храповика 13 п собачки 15 ось 7/ связапа с сипхроппым электродвигателем 10. В этом случае кулачки 16 и 17 вращаются, обеспечивая печатание точек кареткой 2 на ленте 33, переключение коммутатора 26 п поворот цифрового барабана каретки 2. Включение механизма задержки производится с помощью электромагнита 24 с флажком 25 следующим образом.
Кулачок 18, жестко связанный с шестерней 12, и кулачок/4, вращаясь, сообщают качательное движение траверсе 19, нрижатой пружиной к кулачкам 14 и 18. Кулачок 14 передает траверсе за один оборот одно качательное движение, а кулачок 18 - два. При вращении обоих кулачков движение траверсы 19 определяется профилем кулачка 14, поэтому траверса совершает только одно качательное движение за один оборот оси //. Траверса 19 периодически поднимает вилку 20. Выступ вилки задевает за флажок 25 поворачивает силку 20 относительно ее ocii 23 на некоторый угол.
При опускании траверсы 19 вместе с внлкой 20 одновременно опускается вниз и ка чалка 21, ролик 22 которой скользит ио хностоинку собачки 15, стремяс) noiiepHyTi) качалку вокруг ее оси. Поскольку is это время ннлка 20 повернута и ее н)орези не находятся против nOciyoceii качалки 21, то качалка упирается своими нолуосями в торцы вилки 20. Поэтому качалка 21, не имея возможностн повернуться вокруг своей осн 23, роликом 22 нажмет на хвостовик собачки 15, отожмет ее
от храповика 13 и тем самым нарушит сцепление храпового механизма. Это приводит к прекращению вращения оси 11 и кулачков 16 и 17. Однако траверсы 19 не прекращается, так как кулачок/5, связанный с шестерней 12, продолжает вращаться. Траверса 19 продолжает онускаться, ударяясь срезом пилки 20 по специальному упору, вследствие чего вилка 20 занимает исходное положение и ее прорези оказываются снова против полуосей качалки 21.
Незадолго до того, как зуб храповика вновь подойдет к собачке 15, траверса 19 совершит очередное колебательпое движение и выступ вилки 20 коснется флажка 25 электромагнита
24. Если в это время флажок 25 будет отодвинут электромагннтом 24, то вилка 20 останется в горизонтальном положении. При опускании траверсы 19 полуоси качалки 21 буЛ.ут свободно входить в прорези вилки 20 и
ролик 22 не отожмет собачку 15 от зуба храnoBioia 13, так как качалка 21 имеет возможНОСТ1) поворота вокруг своей осп. Ось // снопа начнет вргицаться с кулачками 16 н /7, которые обеспечат перемен1ецие печатающей каретки 2 для наиесення точки на ленту п с помощью тяги 32 и храпового устройства 30- 31 переключение коммутатора 26. Так как кулачок 18, благодаря своему профилю, сообщает траверсе 19 два качательных движеиия
за один оборот, то с момента остановки оси 11 T)ai5epca начнет качаться с удвоенной частотой, осун1ествляя через каждые полуоборота осн // проверку наличня команды на осуществление цикла регистрации параметра - отвода эле -:тромагнитом 24 флажка 25.
С помощью такого устройства можно обеспечить любую задержку включения печатающей каретки после получепия команды па осуществленне цнкла регистрации. Время задержки определяется передаточпым отпошецием шестеренчатой передачи между синхроиiHJM электродвигателем 10 и осью //. Нанесение меток глубин через каждые 5 м углубления скважины осуществляется следующим образом. Храповое устройство 5 при повороте на один зуб неремещает ленту на длину /,., соответствующую 0,25 м скважнны в выбранном масщтабе глубнн. Контактная группа 37 срабатывает при повороте храпо
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ РЕГИСТРАЦИИ РЕЗУЛЬТАТОВ ПОКОМПОНЕНТНОГО АНАЛИЗАВСЕСОЮЗНАЯ[МТЕ111НО-ТЕХКН4ЕГНДЯI БИБЛИОТЕКА | 1970 |
|
SU286337A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ФУНКЦИИ ПОТЕНЦИОМЕТРОВ | 1966 |
|
SU188575A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ БУРЕНИЯ ПРИ ГАЗОВОМ КАРОТАЖЕ СКВАЖИН | 1969 |
|
SU236382A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ПРИВЕДЕННЫХ ЗНАЧЕНИЙ ПАРАЛ\ЕТРОВ, ХАРАКТЕРИЗУЮЩИХ ГАЗО- И НЕФТЕПРОЯВЛЕНИЯ ПРИ ГАЗОВОМ КАРОТАЖЕСКВАЖИН | 1971 |
|
SU289196A1 |
| Устройство для приварки анодов конденсаторов к рейкам и сборки реек в кассеты | 1977 |
|
SU736193A1 |
| Цифровое печатающее устройство | 1960 |
|
SU146607A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| УПРУГАЯ МУФТА | 1970 |
|
SU259573A1 |
| Устройство для шагового переме-щЕНия КАРЕТКи пишущЕй МАшиНы | 1978 |
|
SU797914A1 |
| Устройство для регистрации значений контролируемых параметров | 1981 |
|
SU958857A1 |
