Изобретение относится к средствам определения дисбаланса тел вращения различных механизмов.
Целью изобретения является повышение точности определения величины и угла дисбаланса путем исключения дополнительной настройки и опытных данных.
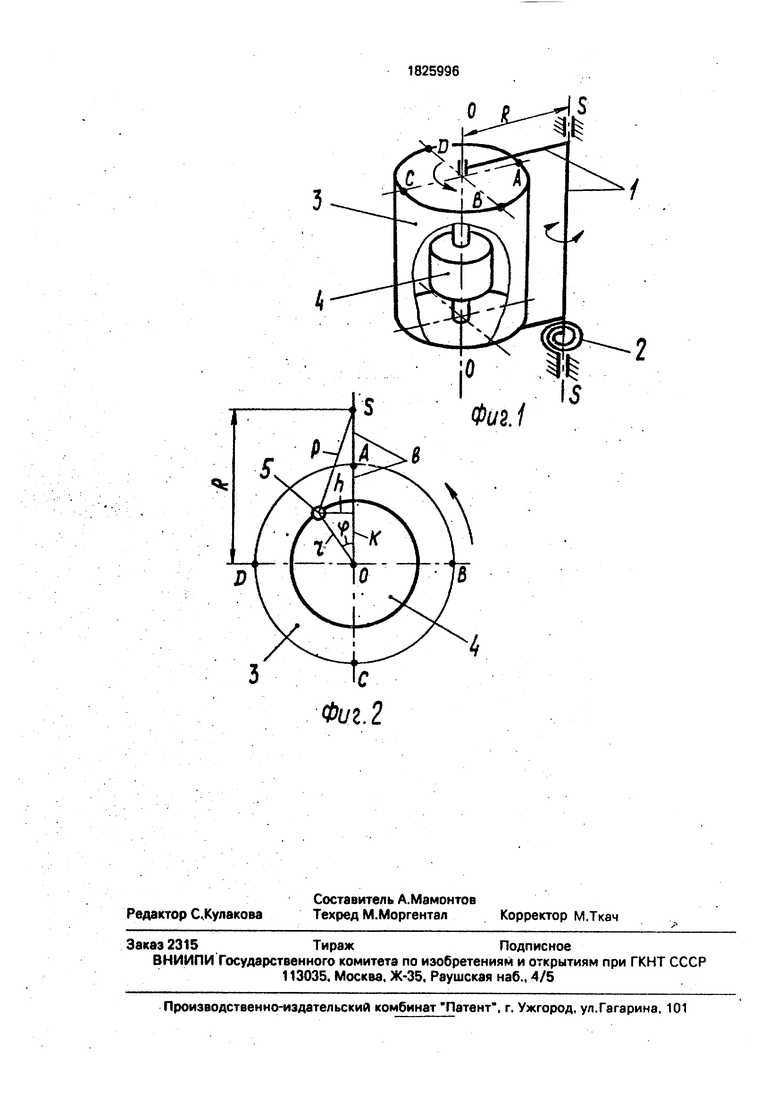
На фиг.1 показана кинематическая схема маятниковой рамы, реализующая предложенный способ; на фиг.2 - рисунок, поясняющий геометрический смысл (вид сверху),
Устройство, реализующее предложенный способ, состоит из маятниковой рамы 1 с вертикальной осью крепления (S-S), подпружиненной упругим элементом 2 (пружина кручения). На раме 1 установлен барабан 3 с вертикальной осью вращения (0-0). Оси 0-0 и S-S параллельны и находятся на расстоянии R друг от друга. Конструкция предусматривает элементы фиксации (не показаны) барабана 3 относительно оси 0--0 в четырех положениях отстоящих на 90 градусов друг от друга (точки А,В,С на барабане 3). Также предусматриваются элементы жесткого крепления (не показаны) исследуемого изделия 4 в барабане 3 и устройство (не показано) замера частоты свободных колебаний системы. Барабан 3 заранее сбалансирован относительно оси 0-0.
Способ осуществляется следующим образом.
Исследуемое изделие 4 с локально расположенной массой 5 (неуравновешенной) устанавливают в барабан 3 и фиксируют. При этом геометрическая ось изделия 4 совпадает с геометрической осью барабана 3 (0-0). Барабан 3 устанавливают в первое положение, при котором точка А лежит в плоскости прямых 0-0 и Раме 1 придают толчок и измеряют частоту свободных колебаний. После этого барабан 3 поворачивают на 90 градусов относительно оси 0-0 (при этом точка 8 лежит в плоскости прямых 0-0 и ) и снова аналогично измеряют частоту. Эту операцию повторяют еще два раза. поворачивая барабан 3 каждый раз на 90 градусов. Таким образом определяют четыре значения частоты свободных колебаний системы ( о;д , с-лз , , (о), соответствуй СО
С
00
ю
СП
ю ю о
щие четырем положениям барабана 3 (см. точки А, В. С, Д). .
Показателем статической неуравновешенности является величина тг, где т - локально расположенная масса 5, г- радиус от ее центра до оси вращения, и угол дисбаланса р.
Величина статического дисбаланса определяется по формуле;
ГОг ш
VfJL;LV -4-r-JLtfi
1(«Д «fcr (Л ofcn
где G - жесткость элемента 2;
R - расстояние между осями 0-0 и S-S:
г - радиус исследуемого изделия 4; о)д . COQ , (Ос, COQ - частоты свободных колебаний систем при соответствующих положениях барабана 3.
Угол дисбаланса определяют по формуле;
Кд-д агяЗ
Измерение моментов инерции системы IA, IB, Ic, д производится с помощью замера частоты свободных колебаний по формуле
1
.
со-частота,
G - жесткость упругого элемента, I - момент инерции.
Таким образом, на величину угла р влияют только значения частот ЫА . OJB . ok. WD. На величину mr влияют величины УА , UB , ftfc , (OQ. G.R. Никакие дополнительные настройки, экспериментальные дан-
ные, связывающие выходную величину от входных, не требуются.
Наличие вертикальной оси колебаний системы (S-S) позволяет исключить влияние
сил тяжести на движение неуравновешенной массы 5 и тем самым - на точность результатов, так как масса 5 движется только в горизонтальной плоскости.
Это позволит добиться максимальной
точности определения величины и угла дисбаланса, снизив ошибку результатов примерно на 40%.
Формула изобретения Способ определения статического дисбаланса изделия, заключающийся в том, что изделие закрепляют на маятниковой раме, возбуждают колебания рамы и по измеренным параметрам колебаний судят о наличии , дисбаланса, отличающийся тем, что, с целью упрощения и повышения точности,
колебания осуществляют относительно вертикальной оси, в качестве параметров колебаний измеряют частоты свободных колебаний при четырех разных положениях изделия, получаемых при его повороте вокруг своей оси каждый раз на 90°, а угол р и величину дисбаланса mr определяют по формулам:
30
(1 (oft a где шд , о)в , ftJfc, ftto - частоты свободных колебаний системы при соответствующих положениях изделия;
G - жесткость упругого элемента;
R - расстояние между вертикальной осью вращения маятниковой рамы и параллельной ей ее осью симметрии.
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Стиральная машина | 1989 |
|
SU1678934A2 |
| СПОСОБ ОЦЕНКИ ИЗНОСА ПОКРЫТИЙ И КАЧЕСТВА ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ МАШИН В РАЗЛИЧНЫХ СРЕДАХ | 2005 |
|
RU2308701C2 |
| Способ оценки технического состояния роторной машины | 1980 |
|
SU901876A1 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Устройство для компенсации дисбаланса вращающейся сборочной единицы | 2019 |
|
RU2710399C1 |
| Способ определения неуравновешенности роторов | 1978 |
|
SU744258A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ФАЗОВЫХ ПЕРЕХОДОВ В ПОДВИЖНЫХ КОНСТРУКЦИЯХ С БАЛАНСИРОВОЧНЫМ КОЛЬЦОМ | 2005 |
|
RU2321844C2 |
Использование: для определения дисбаланса тел вращения рэзл-ичных механизмов. Сущность: изобретение позволяет добиться наибольшей точности величины и угла дисбаланса путем исключения дополнительной настройки и опытных данных, вносящих ошибку в результат. Это происходит благодаря измерению частоты свободных колебаний маятниковой системы, включающей исследуемое изделие, в че- тырех положениях последнего относительно своей геометрической оси, отличающихся друг от друга поворотом каждый раз на 90 град. Колебания системы осуществляют относительно вертикальной оси в горизонтальной плоскости. 2 ил.
| Стенд для определения моментов инерции тел различной формы | 1974 |
|
SU533845A1 |
| Способ статической балансировки изделий | 1978 |
|
SU773469A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
