Настоящее изобретение относится к технике автоматизации процесса динамической балансировки и может быть использовано для определения и коррекции дисбаланса вращающихся тел, в частности жестких роторов.
Способ балансировки роторов предусматривает измерение параметров неуравновешенности (величина неуравновешенной массы, радиус и угол расположения ее центра относительно оси ротора) путем определения двух векторов дисбаланса (дисбаланс - векторная величина, равная произведению неуравновешенной массы на радиус-вектор ее центра относительно оси), которые лежат в двух произвольных плоскостях, перпендикулярных оси ротора. Эти плоскости называют плоскостями приведения неуравновешенности или плоскостями коррекции (см., например, М.Е.Левит, В.М.Рыженков. Балансировка деталей и узлов. М.: Машиностроение, 1986 г.).
Широко известны способы балансировки ротора, основанные на сообщении ротору вращательного движения и измерении амплитуд и фаз его колебаний в плоскостях, перпендикулярных оси ротора (например, пат. ЕР № 0150274, 1985 г.). Плоскости коррекции в соответствии с этим способом фиксируют опорами, в которых устанавливают ротор, а измеренные амплитуды и фазы колебаний ротора осуществляют измерением динамических нагрузок, возникающих в опорах. Недостаток способа связан с необходимостью дополнительной обработки информации о параметрах неуравновешенности в разных плоскостях коррекции.
Известен способ динамической балансировки ротора, основанный, как и вышеприведенный, на его вращении, для реализации которого применено устройство, содержащее вал с закрепленным на нем балансируемым ротором, вращающимся в подшипнике в подвижной опоре, установленной относительно неподвижного основания с помощью системы рычагов, внутренний и внешний датчики силы, установленные в одной плоскости и измеряющие динамические нагрузки между валом ротора и подвижной опорой и между подвижной опорой и неподвижным основанием соответственно (пат. США № 6430992, кл. 73/66, 2002 г.). Данный способ характеризуется необходимостью применения устройства разделения плоскостей коррекции и датчика углового положения вращающегося ротора, а также сложного пускового устройства. Для точного измерения параметров неуравновешенности в двух плоскостях коррекции характерно использование сложной аппаратуры, так как при таком способе необходимо фиксировать координаты расположения неуравновешенных масс в каждой из плоскостей коррекции при вращающемся роторе.
Известен способ автоматической балансировки ротора при его вращении, реализуемый в устройстве для автоматической балансировки (пат. RU № 2241969 С1 кл. G01M 1/38, 2004 г.), который предполагает применение для автоматической балансировки ротора заполненной жидкостью упругой балансировочной камеры, концентрично надетой на ротор, втулки из упругого крупнопористого материала, поры которого заполнены жидкостью с изменяющейся во времени вязкостью от текучего состояния до полного затвердевания. Применение способа затруднено низкой производительностью и ограничено определенной номенклатурой балансируемых роторов.
Общим недостатком способов, основанных на сообщении ротору вращательного движения при установке его в опорах, является сложность реализации автоматической балансировки при совмещении во времени операций определения и устранения неуравновешенности, а также влияние используемых технических средств на результаты измерений из-за вибраций, обусловленных вращением ротора и связанных с биением посадочных поверхностей муфт, овальностью цапф, перекосом наружных колец подшипников качения, наличием смазочного материала в опорах трения скольжения, погрешностями изготовления подшипников качения - волнистостью дорожек качения, гранностью тел качения, дисбалансами сепаратора, аэродинамическими, гидродинамическими и электромагнитными силами.
Настоящее изобретение относится к принципиально иному способу автоматической балансировки, характеризующемуся колебательным движением ротора, при котором возможно совмещение во времени операций определения и устранения неуравновешенности и который позволяет, используя достаточно простые технические средства, повысить точность балансировки.
Этот способ, реализованный в устройстве для автоматической балансировки деталей вращения, известен по а.с. СССР № 289325, кл. G01M 1/38, 1970 г. В соответствии с этим способом ротору, установленному на упругой опоре, сообщают угловое колебательное движение вокруг оси вращения, измеряют его угловое колебательное движение вокруг центра упругой опоры относительно вертикальной оси и устраняют неуравновешенность в процессе движения детали путем ввода в ее технологическое углубление корректирующей массы. Достоинством способа является возможность при ограниченной амплитуде угловых колебаний осуществлять введение корректирующей массы в заранее предусмотренные технологические углубления непосредственно в процессе движения.
Усовершенствование способа автоматической балансировки известно по а.с. СССР № 1193476 А, кл. G01M 1/38, 1984 г., которое направлено на повышение точности автоматического устранения неуравновешенности ротора во время его движения. Для этого измерение колебаний ротора относительно вертикальной оси, вызванных его неуравновешенностью, осуществляют в проекциях с помощью двух ортогонально расположенных датчиков, а введение корректирующей массы производят с помощью четырех идентичных дозирующих механизмов, расположенных попарно и взаимоортогонально над технологическими углублениями ротора.
В указанных изобретениях угловое колебательное движение детали осуществляют с помощью привода, который соединен с валом и установленной на нем деталью через упругую опору.
Аналогом настоящего изобретения является также способ по патенту России № 2270985 С1, кл. G01M 1/16, 20006 г., направленный на повышение точности измерений амплитуды и фазы угловых колебаний ротора и включающий сообщение ротору и соосному ему уравновешенному телу колебательного движения относительно неподвижной точки на общей оси ротора и уравновешенного тела и измерение амплитуды и фазы угловых колебаний ротора, по которым судят о параметрах неуравновешенности ротора, и заключающийся в том, что одновременно, в каждый момент времени в плоскости, проходящей через неподвижную точку, к уравновешенному телу по касательным прикладывают силы, противодействующие угловым колебаниям тела относительно оси, а в качестве упомянутой неподвижной точки используют точку пересечения оси ротора с одной из плоскостей приведения неуравновешенности ротора, а измеренные амплитуду и фазу угловых колебаний используют для определения параметров неуравновешенности в другой плоскости приведения неуравновешенности. Этот способ является прототипом настоящего изобретения.
Общим недостатком данных изобретений является ограничение допустимой амплитуды углового колебательного движения и, как следствие, снижение чувствительности измерения неуравновешенности, а также наличие упругой деформируемой связи между приводом угловых колебаний и валом балансируемой детали. Ограничение амплитуды задаваемых угловых колебаний связано с возникновением динамических возмущающих моментов из-за общей неуравновешенности колебательной системы и при контакте вводимой корректирующей массы с ротором. Возникающие при этом переходные процессы приводят к появлению дополнительных колебаний ротора и к погрешности измерений неуравновешенности. Наличие упругой связи между приводом и балансируемым ротором в условиях неизбежно возникающих значительных крутящих моментов приводит к появлению дополнительных изгибных моментов. Последние вызывают неинформативные колебания ротора, которые являются источником дополнительной погрешности измерения неуравновешенности. Указанные недостатки непосредственно проявляются при автоматической балансировке.
Достигаемым техническим результатом при использовании настоящего изобретения является повышение точности автоматической балансировки путем исключения отмеченных источников дополнительных погрешностей.
В соответствии с настоящим изобретением способ автоматической балансировки ротора, характеризующийся совмещением во времени операций определения и устранения неуравновешенности, при котором ротору и соосному ему уравновешенному телу сообщают угловое колебательное движение в плоскости, перпендикулярной их оси вращения, измеряют проекции возникающих от неуравновешенности угловых колебаний ротора относительно неподвижной точки на оси вращения, вычисляют величину и угловое положение неуравновешенности в одной из плоскостей коррекции и добавляют или удаляют корректирующую массу в установленном месте в выбранной плоскости коррекции на роторе, дополняют новой операцией, а именно ротору и уравновешенному телу сообщают угловые колебательные движения противоположных направлений вокруг их оси вращения, прикладывая одновременно в каждый момент времени по касательным знакопеременные моменты сил, одинаковые по величине, но противоположно направленные, и совмещают плоскость приложения знакопеременных моментов сил с неподвижной точкой на оси вращения и центром массы уравновешенного тела.
Достигнутым при этом техническим результатом является уменьшение погрешности от неинформативных колебаний ротора и уравновешенного тела относительно неподвижной точки на оси вращения за счет исключения вращающих моментов, приложенных к их оси.
Кроме того, с целью исключения причин, вызывающих переходные процессы при контакте корректирующей массы с ротором, оказывающих отрицательное влияние на процесс автоматической балансировки, способ дополняют тем, что в каждый момент времени измеряют угловое положение ротора вокруг оси вращения, суммируют его значение с вычисленным значением углового положения неуравновешенности на окружности радиуса приведения в одной из плоскостей коррекции и производят добавление или удаление корректирующей массы, равной вычисленному значению, в точке, угловое положение которой в неподвижной системе отсчета определяют по результатам суммирования.
Такое решение позволяет уравнять мгновенные угловые скорости колебательного движения ротора и корректирующей массы в момент их контакта. В этом случае возмущающие моменты сил, воздействующие на колебательную систему, не возникают и не создают переходных процессов. Синхронизация колебательных движений балансируемого ротора и механизма устранения дисбаланса позволяет увеличить амплитуду угловых колебаний, а следовательно, чувствительность измерения неуравновешенности и точность балансировки при автоматизации этого процесса.
Способ позволяет осуществлять автоматическую балансировку и таких роторов, у которых масса распределена по окружности неравномерно и сосредоточена в определенных местах, например в лопастях. В этом случае корректировать неуравновешенность можно только в технологически заданных местах. Их расположение на плоскости ротора при этом может быть несимметричным относительно выбранной диаметральной прямой. Цель заявляемого способа автоматической балансировки достигается тем, что результат измерения массы неуравновешенности в одной из плоскостей коррекции представляют в виде проекций на три и более полуоси, расположенные в этой плоскости, исходящие из точки пересечения указанной плоскости и оси вращения так, что они пересекают окружности радиусов приведения в точках, являющихся геометрическими центрами мест устранения неуравновешенности, определяемыми конфигурацией ротора, и производят добавление или удаление равных вычисленным в проекциях корректирующих масс в точках, угловое положение которых в неподвижной системе отсчета в каждый момент времени определяют как сумму текущего значения угла колебаний ротора вокруг оси вращения и заданных угловых положений соответствующих полуосей.
Для автоматической балансировки роторов в двух плоскостях коррекции в заявляемом способе плоскость приложения к ротору и уравновешенному телу одинаковых по величине, но противоположных по направлению знакопеременных моментов сил совмещают с одной из плоскостей коррекции, а измеренные проекции вектора вынужденных колебаний балансируемого ротора используют для определения и устранения неуравновешенности в другой плоскости коррекции.
Технический результат, обеспечиваемый совмещением плоскости приложения знакопеременных моментов к ротору и уравновешенному телу с одной из плоскостей коррекции, заключается в дальнейшем повышении точности способа за счет устранения взаимного влияния плоскостей коррекции ротора.
Известно устройство для автоматической балансировки деталей, с помощью которого реализуется заявляемый способ, по а.с. СССР № 410274, кл. G01M/ 1/36, 1974 г. предназначенное для способа балансировки, основанного на сообщении детали углового колебательного движения в плоскости, перпендикулярной его оси. Устройство содержит станину, вал в подшипниках с закрепленной на верхнем конце балансируемой деталью и подвешенный на станине при помощи упругого элемента в виде мембраны с возможностью его колебаний относительно вертикальной оси вокруг ее центра, привод угловых колебаний, жестко установленный на станине и связанный с нижним концом вала посредством упругой муфты, размещенной за пределами плоскости мембраны, датчик измерения величины неуравновешенности, измерительный блок, блок управления и устройства коррекции неуравновешенности, размещенные над балансируемой деталью с возможностью ее осуществления в заданных местах. Перечисленные блоки, датчик и устройства коррекции неуравновешенности соединены между собой по схеме, обеспечивающей измерение и коррекцию неуравновешенной массы.
Недостатком этого устройства является невысокая точность балансировки из-за действия вращающих моментов, приложенных к упругой муфте и вызываемых при этом неинформативных колебаний вала с балансируемой деталью в вертикальной плоскости вокруг центра мембраны, а также из-за переходных процессов от действия возмущающих моментов, возникающих при контакте корректирующей массы с деталью.
Прототипом устройства, с помощью которого реализуется заявляемый способ, является устройство, известное по а.с. СССР № 1193476 А, кл. G01M/ 1/36, 1985 г. и предназначенное для способа балансировки, основанного на сообщении балансируемой детали угловых колебаний в плоскости, перпендикулярной ее оси. Устройство содержит измерительную систему, выполненную в виде вертикального подвеса с установленной на нем балансируемой деталью и упругих элементов, удерживающих подвес от опрокидывания, привод, сообщающий угловые колебания балансируемой детали, пружину, удерживающую вал привода от проворота, два ортогонально расположенных датчика дисбаланса, два измерительных усилителя, соединенных своими входами с датчиками дисбаланса, два регулируемых источников тока, соединенных своими входами с выходами соответствующих измерительных усилителей, два переключающих устройства, подключенных своими входами к выходам измерительных усилителей, и четыре идентичных механизма коррекции дисбаланса, расположенных над технологическими углублениями детали, каждый из которых выполнен в виде двух сообщающихся сосудов, один из них снабжен выходным соплом и заполнен корректирующим веществом, а второй заполнен электролитом и снабжен погруженным в него электродом, соединенным с выходом управляемого источника тока через соответствующее переключающее устройство.
Общим недостатком этих устройств, так же как и известного способа, является недостаточно высокая точность балансировки из-за неинформативных колебаний вала с балансируемой деталью в вертикальной плоскости вокруг неподвижной точки подвеса, обусловленных действием вращающих моментов, приложенных к упругому элементу подвеса, а также от действия возмущающих моментов, возникающих при контакте корректирующего вещества с деталью. Кроме того, в известных устройствах не предусмотрена возможность автоматической балансировки несплошных деталей в двух плоскостях коррекции, у которых масса распределена по окружности неравномерно и сосредоточена в определенных местах, например в лопастях, расположенных на каждой плоскости коррекции несимметрично относительно выбранной диаметральной прямой. В этом случае корректировать неуравновешенность можно только в технологически заданных местах, определяемых конфигурацией детали.
Техническим результатом, получаемым при применении заявляемого устройства, является повышенная точность балансировки, достигаемая использованием более простых технических средств, не вызывающих неинформативных колебаний вала с балансируемой деталью в вертикальной плоскости вокруг неподвижной точки подвеса, обусловленных действием вращающих моментов, приложенных к упругому элементу подвеса.
Для реализации способа в устройстве, содержащем станину, упругую опору, жестко закрепленную нижним основанием на станине, вал с соосно закрепленным на одном конце ротором, установленный в подшипниках вертикально и связанный с верхним основанием упругой опоры с возможностью его колебаний вокруг ее центра, привод угловых колебаний, установленный соосно валу, выполненный в виде электрической машины с уравновешенными дисковыми статором и якорем, возвратную пружину, связанную одним концом с валом, источник переменного напряжения, соединенный с обмоткой якоря электрической машины, датчики измерения проекций колебаний вала вокруг центра упругой опоры относительно вертикальной оси, блоки преобразования сигналов, блок управления и управляемые механизмы коррекции дисбаланса, выполненные в виде герметичных емкостей, заполненных уравновешивающим веществом и снабженные соплами и управляемыми нагнетателями, вход каждого из которых соединен с соответствующим выходом блока управления, вал выполнен полым, установлен на верхнем основании упругой опоры с возможностью его вращения и жестко связан на другом конце с дисковым якорем электрической машины, а дисковый статор электрической машины установлен на верхнем основании упругой опоры на подшипниках с возможностью вращения так, что центр его массы совмещен с плоскостью симметрии дискового якоря и находится в одной плоскости с центром качания упругой опоры, в устройство введена вторая возвратная пружина, соединенная одним концом со статором, а другим - со вторым концом первой возвратной пружины и верхним основанием упругой опоры в точке, расположенной на оси вала, причем жесткости каждой возвратной пружины выбраны из условия равенства собственных частот колебаний статора и колебаний жестко связанных между собой якоря, полого вала и ротора относительно верхнего основания упругой опоры соответственно.
Устранение переходных процессов в устройстве от действия возмущающих моментов, возникающих при контакте уравновешивающего вещества с ротором, достигается тем, что в него дополнительно введены датчик угла колебаний ротора вокруг оси, установленный на полом валу, блок измерения угла колебаний ротора, соединенный своим входом с выходом датчика угла колебаний ротора, блок измерения величины неуравновешенности, соединенный своими входами с выходами блоков преобразования сигналов, блок измерения угла расположения неуравновешенности, соединенный своими входами с выходами блоков преобразования сигналов, электрический привод углового движения, установленный над корректируемой плоскостью ротора соосно его оси так, что статор электрического привода жестко связан со станиной, кронштейн изменяемой длины, установленный на валу электрического привода углового движения перпендикулярно его оси и связанный с механизмом коррекции дисбаланса с возможностью регулирования его радиуса вращения вокруг оси ротора, датчик углового положения механизма коррекции дисбаланса, установленный на электрическом приводе углового движения, блок измерения углового положения механизма коррекции дисбаланса, соединенный своим входом с выходом датчика измерения углового положения механизма коррекции дисбаланса, дифференциальный усилитель, соединенный первым входом с выходом блока измерения углового положения механизма коррекции дисбаланса, а выходом с входом электрического привода углового движения, сумматор, соединенный своим первым входом с выходом блока измерения угла расположения неуравновешенности, и пороговое устройство, соединенное своим входом с выходом дифференциального усилителя, выход порогового устройства соединен с первым входом блока управления механизма коррекции дисбаланса, второй вход которого соединен с выходом блока измерения величины неуравновешенности, второй вход сумматора соединен с выходом блока измерения углового положения механизма коррекции дисбаланса, а выход сумматора - со вторым входом дифференциального усилителя, коэффициент усиления которого выбран таким, при котором амплитуда и фаза угловых колебаний сопла управляемого механизма коррекции вокруг оси вращения электрического привода углового движения равны соответственно амплитуде и фазе угловых колебаний ротора вокруг его оси, а угловое положение оси сопла в каждый момент времени равно вычисленному значению углового положения точки введения корректирующего вещества.
Реализация способа при балансировке несплошных роторов, у которых масса распределена по окружности неравномерно и сосредоточена в определенных местах, например в лопастях, расположенных в плоскостях коррекции несимметрично относительно выбранной диаметральной прямой, в устройстве достигается тем, что в него дополнительно введены блок измерения проекций неуравновешенности на полуоси коррекции, соединенный своими входами с выходами преобразователей сигнала, а своими выходами с входами блока управления механизмами коррекции дисбаланса, и платформа, выполненная в виде диска с радиальными пазами, количество которых и их угловое расположение на диске соответствует числу и угловому расположению точек центров геометрических мест введения корректирующего вещества, определяемых конфигурацией ротора, и установлена соосно на валу электрического привода углового движения, управляемые механизмы коррекции дисбаланса установлены в пазах платформы так, что оси каждого из их сопел совмещены с точками центров геометрических мест введения корректирующего вещества на роторе.
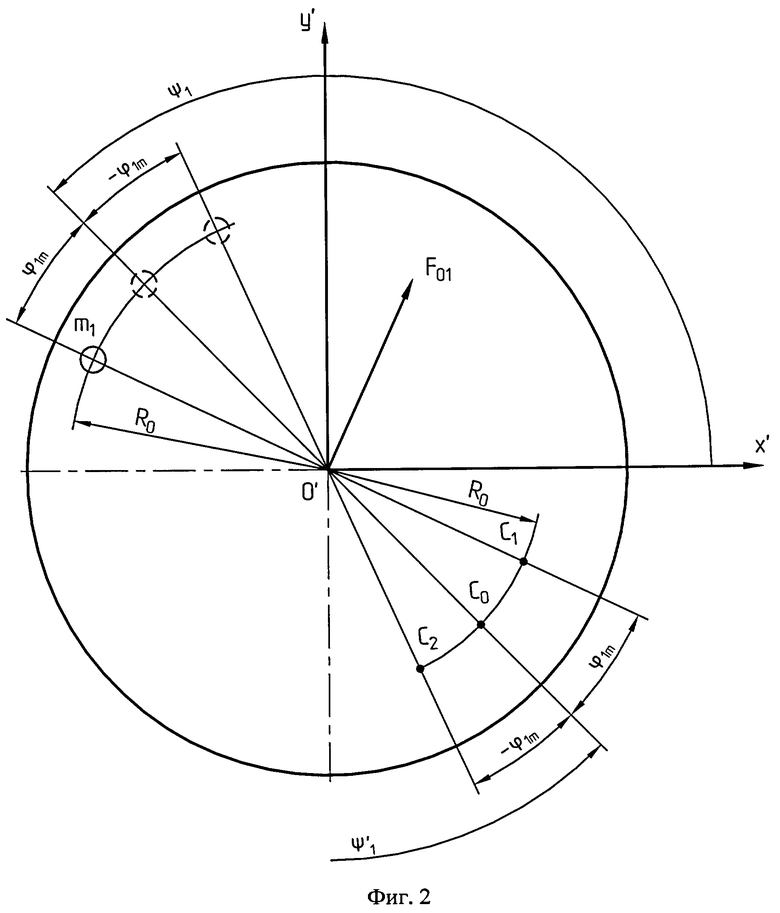
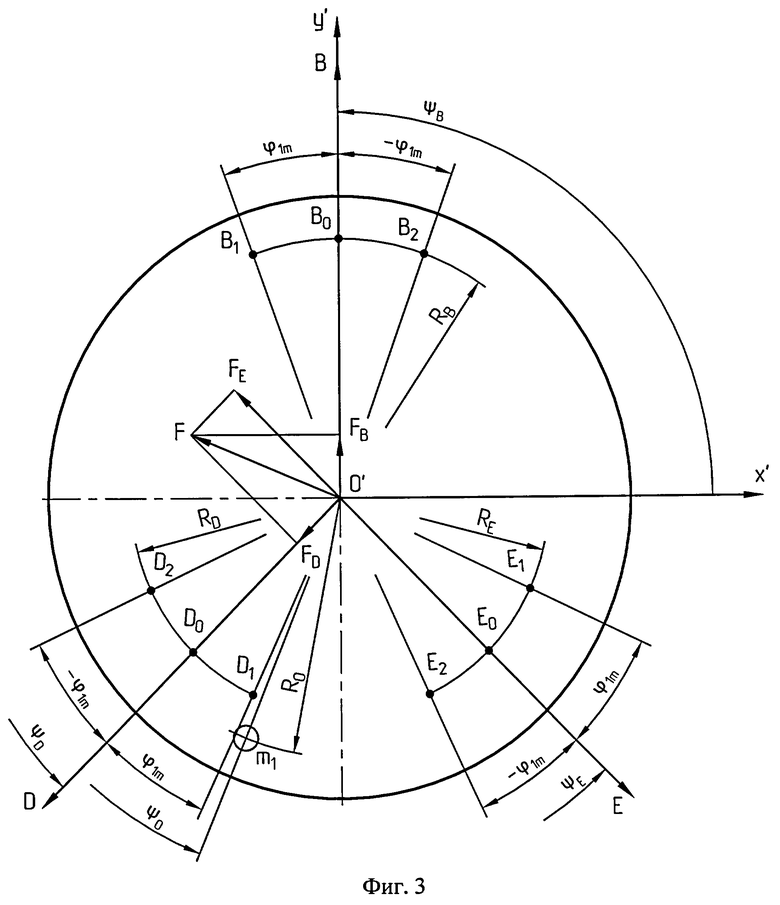
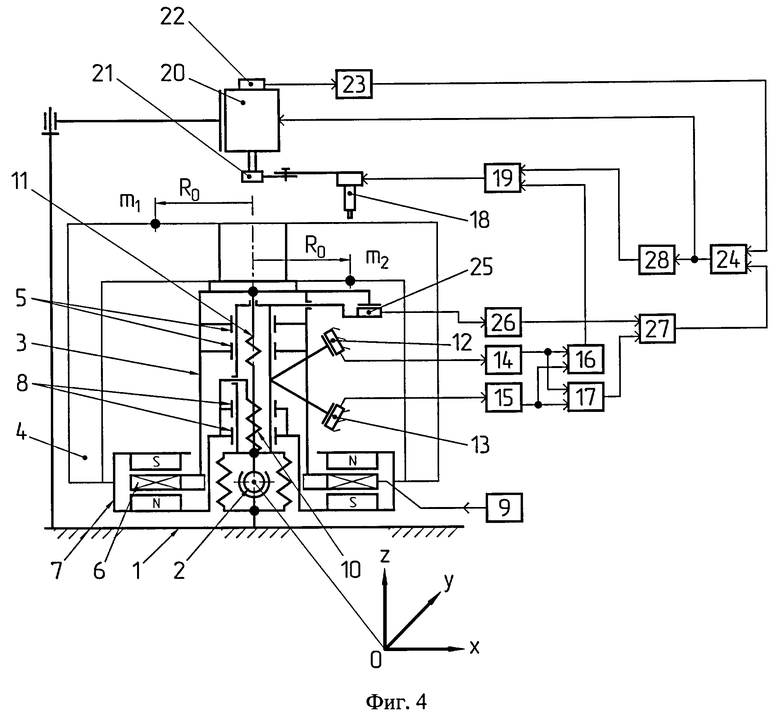
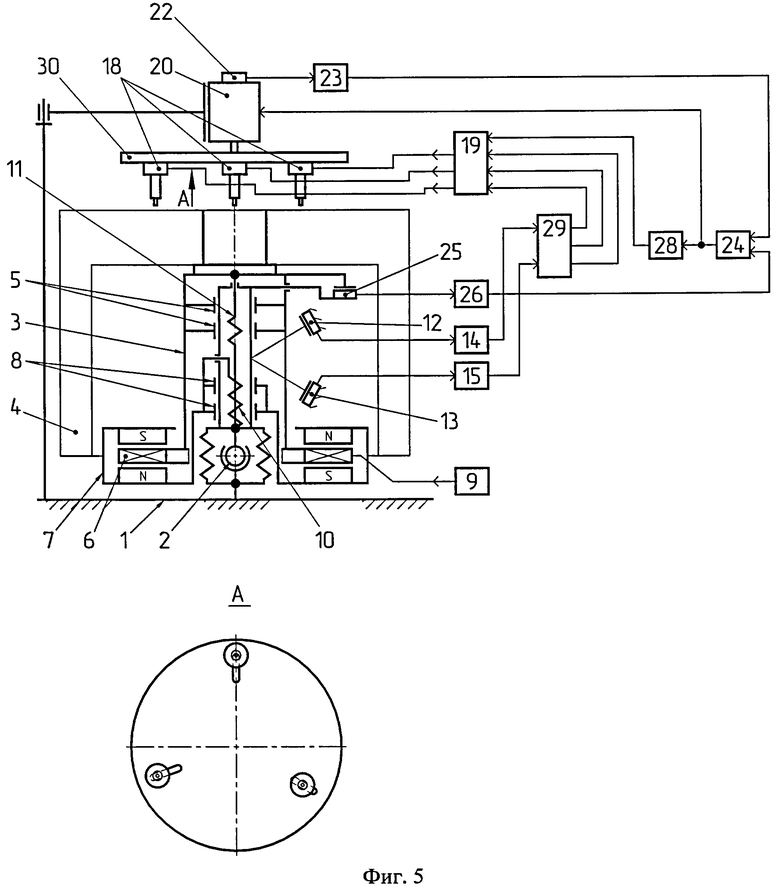
Сущность настоящего изобретения поясняется чертежами. На фиг.1 представлена схема установки балансируемого ротора и соосного ему уравновешенного тела, показаны действующие силы приложенных знакопеременных моментов и направления движений, происходящих при балансировке. На фиг.2 - схема, поясняющая способ определения угловой координаты точки добавления или удаления корректирующей массы в одной из плоскостей коррекции при векторном представлении результатов измерения неуравновешенности ротора. На фиг.3 - схема, поясняющая способ определения угловых координат точек добавления или удаления корректирующих масс в одной из плоскостей коррекции ротора при представлении результата определения неуравновешенности в виде проекций вектора на три или более полуоси. На фиг.4 схематично изображено устройство, с помощью которого реализуется способ при векторном представлении и коррекции неуравновешенности, на фиг.5 - устройство, характеризующееся представлением и коррекцией неуравновешенности в виде проекций вектора на три или более полуоси.
На фиг.1 приведены:
OXYZ - система неподвижных координатных осей и подвижная ось OZ' системы O'X'Y'Z', совмещенная с осью OO' вращения ротора 1 и уравновешенного тела 2;
F1, F2 и R1, R2 - силы и радиусы соответственно приложения знакопеременных моментов к ротору 1 и уравновешенному телу 2:
α и β - углы отклонения оси OZ' ротора 1 под действием неуравновешенности вокруг осей ОХ и OY соответственно;
φ1 и φ2 - текущие значения углового положения ротора 1 и уравновешенного тела 2 вокруг оси OZ';
m1, Ψ1 и m2, Ψ2 - массы неуравновешенности и их угловые координаты расположения на радиусе приведения R0 в I и II плоскостях коррекции соответственно;
F01 - сила инерции массы m1, пропорциональная m1·R0 и вызывающая дополнительное колебательное движение ротора 1 относительно неподвижной точки О вокруг осей ОХ и OY при уравновешивании в плоскости коррекции I;
F02 - сила инерции массы m2, действующая в плоскости коррекции II и расположена в плоскости, проходящей через неподвижную точку О, которая является центром дополнительного колебательного движения ротора I и, следовательно, не оказывает влияния на это движение.
Благодаря тому что ротору 1 и уравновешенному телу 2 сообщают угловые колебательные движения противоположных направлений вокруг их оси вращения, прикладывая к ним одновременно в каждый момент времени по касательным знакопеременные моменты сил, одинаковые по величине, но противоположно направленные, результирующий момент, приложенный к оси вращения OZ', близок к нулю. При этом исключаются дополнительные изгибные моменты и неинформативные колебания ротора, являющиеся источником погрешности. Совмещение плоскости приложения к ротору 1 и уравновешенному телу 2 знакопеременных моментов сил с неподвижной точкой оси OZ' и центром массы уравновешенного тела позволяет исключить возможность появления дополнительных колебаний ротора 1 из-за неидеальности уравновешенного тела 2 (наличие остаточной неуравновешенности). Это обеспечивается минимизацией длины плеча приложения сил инерции относительно неподвижной точки О.
На фиг.2 показаны:
X'OY' - плоскость, совпадающая с плоскостью коррекции I ротора 1;
Ψ1 и Ψ2' - угловые координаты расположения неуравновешенной массы m1 и точки С0 добавления или удаления корректирующей массы на радиусе приведения R0 ротора 1 в момент времени прохождения им углового положения равновесия;
φ1m - амплитуда угловых колебаний ротора 1 относительно положения равновесия;
C1 и C2 - точки добавления или удаления корректирующей массы при амплитудных значениях φ1m, - φ1m угла колебаний ротора 1 относительно положения равновесия соответственно.
Согласно изобретению положение точки, например, точки C1 добавления или удаления корректирующей массы в одной из плоскостей коррекции в каждый момент времени определяется как результат суммирования в неподвижной системе отсчета измеренного текущего значения угла колебаний φ1 ротора вокруг оси вращения и вычисленного значения углового положения Ψ1 неуравновешенности, то текущее положение точки добавления или удаления корректирующей массы в каждый момент времени будет неподвижно относительно колеблющегося ротора 1. Это позволяет исключить возмущающие моменты сил и переходные процессы, возникающие при контакте корректирующей массы с ротором 1 и тем самым повысить точность балансировки ротора в автоматическом режиме.
На фиг.3 показаны:
ΨB, ΨD, ΨE - угловые координаты пересечения полуосей OB, OD, ОЕ с окружностями радиусов приведения RB, RD, RE, определяющие центры технологических площадок для добавления или удаления корректирующей массы для роторов, у которых масса распределена по окружности неравномерно, например для лопастных деталей;
F - вектор силы инерции массы m1, пропорциональный m1·R0, a FB, FD, FE - векторы его проекций на полуоси OB, OD, ОЕ соответственно;
В0, D0, E0 - точки добавления или удаления корректирующей массы в момент времени прохождения ротором 1 углового положения равновесия;
B1, В2, D1, D2, E1, Е2 - точки добавления или удаления корректирующей массы при амплитудных значениях угла φ1m, - φ1m колебаний ротора относительно положения равновесия.
Согласно предлагаемому изобретению результат измерения массы неуравновешенности в одной из плоскостей коррекции представляют в виде проекций на три или более полуоси, расположенные в этой плоскости и исходящие из точки О пересечения указанной плоскости и оси вращения так, что они пересекают окружности радиусов приведения RB, RD, RE в точках В0, D0, E0. Последние являются геометрическими центрами мест устранения неуравновешенности и определяются конфигурацией ротора, в которые производят добавление или удаление корректирующих масс, равных вычисленным в проекциях значениям.
Это позволяет осуществлять автоматическую балансировку несплошных роторов, у которых масса распределена по окружности неравномерно, а расположение геометрических центров В0, D0 и E0, мест коррекции неуравновешенности определяется конфигурацией ротора. При этом за счет того, что угловые положения точек добавления или удаления корректирующих масс определяют в неподвижной системе отсчета в каждый момент времени как сумму текущего значения угла φ1 колебаний ротора вокруг оси вращения и угловых положений ΨB, ΨD, ΨE соответствующих полуосей, обеспечивается условие равенства мгновенных угловых скоростей ротора и корректирующей массы в момент контакта и, следовательно, исключаются причины, вызывающие переходные процессы и тем самым повышается точность уравновешивания несплошных роторов.
Для автоматической балансировки роторов в двух плоскостях коррекции I и II в заявляемом способе плоскость приложения к ротору и уравновешенному телу одинаковых по величине, но противоположных по направлению знакопеременных моментов сил совмещают с одной из плоскостей коррекции, например II, а измеренные проекции вектора вынужденных колебаний балансируемого ротора используют для определения и устранения неуравновешенности в другой плоскости коррекции, например I. При совмещении плоскости XOY приложения знакопеременных моментов сил к ротору 1 и уравновешенному телу 2 с плоскостью коррекции II сила F02, пропорциональная силе инерции массы m2, приложена к оси ротора OZ' в неподвижной точке О. Длина плеча изгибающего момента этой силы для данного положения ротора 1 равна нулю, что исключает возможность его колебаний под действием силы F02. Одновременно под действием силы F01 возникает изгибающий момент силы, приложенный к оси OZ' в плоскости коррекции I относительно неподвижной точки О, который вызывает информативные колебания ротора 1.
При совмещении плоскости XOY приложения знакопеременных моментов сил к ротору 1 и уравновешенному телу 2 с плоскостью коррекции I изгибающий момент, приводящий к информативным колебаниям ротора 1, возникает только под действием силы F02. Этим достигается исключение взаимного влияния неуравновешенности различных плоскостей коррекции друг на друга.
Устройство для автоматической балансировки ротора (фиг.4) содержит станину 1, упругую опору 2, жестко закрепленную нижним основанием на станине 1, полый вал 3 с соосно закрепленным на одном конце ротором 4, установленный вертикально в подшипниках 5 на верхнем основании опоры 2 с возможностью вращения вокруг своей оси и колебаний вокруг центра упругой опоры 2, привод угловых колебаний, установленный соосно полому валу 3, выполненный в виде электрической машины с уравновешенным дисковым якорем 6, закрепленным на другом конце полого вала 3, и дисковым статором 7, установленным на верхнем основании упругой опоры 2 в подшипниках 8 с возможностью его вращения так, что центр его массы совмещен с плоскостью симметрии дискового якоря 6 и плоскостью, проходящей через центр упругой опоры 2. Питание обмотки якоря 6 электрической машины производится от источника переменного напряжения 9.
Для возврата ротора в исходное угловое положение при колебаниях применены две возвратные пружины 10 и 11, закрепленными одними концами в общей точке на верхнем основании упругой опоры, а другими концами связаны с полым валом 3 и дисковым статором 7 электрической машины. Измерение неуравновешенности ротора 4 производится датчиками 12 и 13, расположенными в горизонтальной плоскости под углом 90 градусов друг относительно друга и соединенными своими выходами с входами блоков преобразования сигналов 14 и 15, выходы которых соединены с входами блока измерения величины неуравновешенности 16 и входами блока измерения угла расположения неуравновешенности 17. Устройство содержит механизм коррекции дисбаланса 18, включающий управляемый нагнетатель, подключенный своим входом к выходу блока управления 19. Механизм коррекции дисбаланса установлен на валу электрического привода углового движения 20 с помощью кронштейна 21 изменяемой длины. На валу электрического привода углового движения 20 установлен датчик углового положения механизма коррекции дисбаланса 22, выход которого соединен с входом блока измерения углового положения механизма коррекции дисбаланса 23, выход которого соединен с первым входом дифференциального усилителя 24.
Для измерения угла колебаний ротора 4 введен датчик 25, выход которого соединен с входом блока измерений угла колебаний ротора 26. Выход блока 26 соединен с входом сумматора 27, второй вход которого соединен с выходом блока измерения угла расположения неуравновешенности 17, а выход сумматора 27 соединен со вторым входом дифференциального усилителя 24, выход которого соединен с входом порогового устройства 28 и с входом электрического привода углового движения 20, а выход порогового устройства 28 соединен с первым входом блока управления механизмом коррекции дисбаланса 19, второй вход которого соединен с выходом блока измерения величины неуравновешенности 16.
Устройство (фиг.5), реализующее способ автоматической балансировки несплошных роторов, у которых масса распределена по окружности неравномерно и сосредоточена в определенных местах, например, в лопастях, расположенных в плоскостях коррекции несимметрично относительно выбранной диаметральной прямой, дополняется тем, что в него введены блок измерения проекций неуравновешенности на полуоси коррекции 29, соединенный своими входами с выходами преобразователей сигнала 14 и 15, а своими выходами соединен с входами блока управления механизмами коррекции дисбаланса 19, и платформа 30. Последняя выполнена в виде диска с радиальными пазами, количество которых и их угловое расположение на диске соответствует числу и угловому расположению точек центров геометрических мест введения корректирующего вещества, определяемых конфигурацией ротора 4. Платформа 30 установлена соосно на валу электрического привода углового движения 20, а управляемые механизмы коррекции дисбаланса 18 установлены в пазах платформы 30 так, что оси каждого из их сопел совмещены с точками центров геометрических мест введения корректирующего вещества. Выход блока измерения углового положения механизма коррекции дисбаланса 23 соединен с первым входом дифференциального усилителя 24, со вторым входом которого соединен выход блока измерений угла колебаний ротора 26, а выход дифференциального усилителя 24 соединен с входом порогового устройства 28 и с входом электрического привода углового движения 20, выход порогового устройства 28 соединен с первым входом блока управления механизмом коррекции дисбаланса 19, выходы которого соединены с механизмами коррекции дисбаланса 18.
Устройство (фиг.4) работает следующим образом.
Ротор 4 устанавливают и закрепляют на полом валу 3, совмещая его нижнюю плоскость коррекции с плоскостью симметрии дискового якоря 6, и размещают над верхней плоскостью коррекции ротора 4 соосно его оси электрический привод углового движения 20 с установленным на кронштейне 21 механизмом коррекции дисбаланса 19. Регулируют длину кронштейна 21 до совпадения оси сопла механизма коррекции дисбаланса 19 с окружностью заданного радиуса приведения. На обмотку дискового якоря 6 привода угловых колебаний от источника переменного напряжения 9 подают переменное напряжение низкой частоты (порядка десятков Герц), тем самым одновременно прикладывают к дисковым якорю 6 и статору 7 в каждый момент времени знакопеременные моменты сил, равные по величине, но противоположно направленные и изменяющиеся во времени с частотой питающего напряжения. Под действием знакопеременных моментов сил дисковый якорь 6 совместно с полым валом 3 и ротором 4 приходит в угловое колебательное движение постоянной амплитуды и частоты относительно дискового статора 7. Величину амплитуды угловых колебаний ротора 4 выбирают равной 3…5 градусам. Одновременно с якорем 6 и жестко связанных с ним полым валом 3 и ротором 4 дисковый статор 7 приходит в колебательное движение вокруг общей оси в противоположном направлении относительно дискового якоря 6. Отношение амплитуд угловых колебаний дисковых статора 7 и ротора 6 в неподвижной системе отсчета определено соответствующим соотношением осевого момента инерции жестко связанной системы (дисковый якорь 6, полый вал 3 и ротора 4) к сумме осевых моментов инерции дискового статора 7 и упомянутой системы. Это соотношение принимают порядка 0,1 и обеспечивают выбором соответствующих размеров дискового статора 7. При таких условиях амплитуда угловых колебаний дискового статора 7 не превышает 0,3…0,5 градусов. При наличии неуравновешенной массы m1 (фиг.4) на радиусе приведения R0 в верхней плоскости коррекции на ротор 4 действует изменяющаяся во времени по гармоническому закону сила F01 - инерции массы m1, пропорциональная m1·R0 и приложенная к ротору 4 в точке пересечения его оси и верхней плоскости коррекции. Сила F01 вызывает дополнительное колебательное движение полого вала 3 вместе с закрепленным на нем ротором 4 в вертикальной плоскости относительно неподвижной точки О вокруг осей ОХ и OY. При этом сила инерции F02 массы неуравновешенности m2 приложена к оси ротора 4 в нижней плоскости коррекции, совмещена с плоскостью, проходящей через неподвижную точку О, и, следовательно, не вызывает дополнительного движения ротора 4.
Колебания ротора 4 в вертикальной плоскости относительно неподвижной точки О вокруг осей ОХ и OY измеряются датчиками 12 и 13. Преобразованные в блоках преобразования 14 и 15 сигналы, пропорциональные проекциям неуравновешенности, поступают на блоки 16 и 17, на выходах которых формируются сигналы, пропорциональные величине угла расположения и массы неуравновешенности ротора 4 в верхней плоскости коррекции. Сигнал с выхода блока измерения угла расположения неуравновешенности 17 суммируется с сигналом на выходе блока измерений угла колебаний ротора 26 с помощью сумматора 27, с выхода которого сигнал поступает на вход дифференциального усилителя 24. На второй вход дифференциального усилителя 24 подается сигнал с выхода блока измерения углового положения механизма коррекции дисбаланса 23. Разностный сигнал с выхода дифференциального усилителя 24 поступает на вход электрического привода углового движения 20. Это приводит в движение его вал и связанный с ним механизм коррекции дисбаланса 18. В результате этого движения меняется угловое расположение сопла механизма коррекции так, что сопло устанавливается в точке, смещенной в верхней плоскости коррекции вокруг оси ротора 4 на 180 градусов относительно текущего значения угла расположения его массы неуравновешенности.
При этом сопло совершает угловое колебательное движение, совпадающее по фазе и амплитуде с колебательным движением ротора 4 вокруг его оси, что исключает изменение их взаимного расположения.
Когда разностный сигнал с дифференциального усилителя 24 уменьшится до порога срабатывания порогового устройства 28, включается блок управления механизмом коррекции дисбаланса 19 и приводится в работу нагнетатель механизма коррекции дисбаланса 18. В результате этого из сопла механизма коррекции дисбаланса 18 подается корректирующее вещество, которое наносится на плоскость коррекции ротора 4 в заданную точку. При этом корректирующее вещество в момент его контакта с поверхностью ротора 4 не создает возмущающих воздействий на последний в тангенциальном направлении, поскольку угловые положения сопла и точки контакта ротора 4 в каждый момент времени одинаковы и их угловые скорости равны. Блок измерения величины неуравновешенности 16 контролирует изменение массы неуравновешенности, постоянно выдавая результат измерения в блок управления механизмом коррекции дисбаланса 19. При достижении требуемого уровня остаточной неуравновешенности блок управления механизмом коррекции дисбаланса 19 выдает сигнал окончания нагнетателю механизма коррекции дисбаланса 18 и процесс автоматической балансировки ротора 4 в верхней плоскости коррекции завершается.
Для автоматической балансировки ротора 4 в другой плоскости коррекции его устанавливают и закрепляют на полом валу 3, совмещая противоположную плоскость коррекции с плоскостью симметрии дискового якоря 6, и размещают над верхней плоскостью коррекции ротора 4 соосно его оси привод углового движения 20 с установленным на кронштейне 21 механизмом коррекции дисбаланса 19. Регулируют длину кронштейна 21 до совпадения оси сопла механизма коррекции дисбаланса 19 с окружностью заданного радиуса приведения. Затем повторяют процесс автоматической балансировки, при котором корректирующее вещество добавляют в установленную точку на корректируемой плоскости.
Устройство для балансировки несплошных роторов (фиг.5) работает следующим образом.
Ротор 4 устанавливается и закрепляется на полом валу 3. При этом платформа 30 устанавливается таким образом, чтобы управляемые механизмы коррекции дисбаланса 18 были размещены в пазах платформы так, чтобы оси каждого из их сопел совпадали с точками центров геометрических мест введения корректирующего вещества. При подключении переменного напряжения к якорю 6 привода угловых колебаний ротор 4 приходит в колебательное движение, которое при наличии неуравновешенности ротора 4 вызывает появление сигналов на выходах датчиков 12 и 13.
Преобразованные в блоках 14 и 15 сигналы поступают на входы блока измерения проекций неуравновешенности на полуоси коррекции 29. На выходе блока измерений угла колебаний ротора 26 появляется гармонический сигнал, который усиливается дифференциальным усилителем 24 и приводит в колебательное движение вал привода углового движения 20. Это вызывает появление на выходе блока измерения углового положения механизма коррекции дисбаланса 23 сигнала, пропорционального угловому положению механизма коррекции дисбаланса 18. Формируемый этим блоком сигнал вычитается из сигнала с выхода блока измерений угла колебаний ротора 26, что приводит к уменьшению амплитуды сигнала на выходе дифференциального усилителя 24. По окончании переходных процессов на выходе дифференциального усилителя 24 формируется гармонический сигнал небольшой величины, достаточной для обеспечения равенства амплитуды и фазы угловых колебаний платформы 30 и сопел управляемого механизма коррекции соответственно амплитуде и фазе угловых колебаний ротора вокруг его оси. Равенство амплитуд и фаз колебаний достигается выбором коэффициента усиления дифференциального усилителя. Уменьшение амплитуды выходного сигнала с выхода дифференциального усилителя 24 ниже определенного порога вызывает формирование сигнала на выходе порогового устройства 28 и включается блок управления механизмом коррекции дисбаланса 19. В результате этого из сопел механизмов коррекции дисбаланса 18 подается корректирующее вещество, которое наносится на плоскость коррекции ротора 4 в заданные точки.
В процессе подачи корректирующего вещества меняется уровень дисбаланса ротора, что приводит к уменьшению уровней сигналов на выходах блока измерения проекций неуравновешенности на полуоси коррекции 29. Как только уровень сигнала на выходах блока измерения проекций неуравновешенности 29 уменьшится до заданной величины, блок управления механизмом коррекции дисбаланса 19 выдаст сигнал окончания работы нагнетателям механизма коррекции дисбаланса 18 и процесс автоматической балансировки ротора 4 в верхней плоскости коррекции завершается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1993 |
|
RU2105962C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2299409C1 |
| Способ балансировки деталей вращения и устройство для его осуществления | 1984 |
|
SU1247702A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Устройство для балансировки роторов | 1978 |
|
SU815541A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
Изобретения относятся к измерительной технике. Способ заключается в следующем. Сообщают ротору и соосному ему уравновешенному телу угловое колебательное движение вокруг их общей оси. Измеряют проекции возникающих угловых колебаний относительно неподвижной точки на оси вращения, вычисляют величину и угловое положение неуравновешенности и добавляют или удаляют корректирующую массу в установленное место в выбранной плоскости коррекции. Причем ротору и уравновешенному телу одновременно в каждый момент времени сообщают угловые колебательные движения противоположных направлений вокруг их оси вращения, прикладывая по касательным знакопеременные моменты сил, одинаковые по величине, но противоположно направленные в плоскости, проходящей через неподвижную точку на оси вращения и центр массы уравновешенного тела. Устройство состоит из станины, упругой опоры, установленной на станине нижним основанием, вала в подшипниках, установленного вертикально с соосно закрепленным ротором и связанного с верхним основанием упругой опоры, привода угловых колебаний, выполненного в виде электрической машины с дисковыми якорем и статором, датчиков измерения проекций колебаний, блоков преобразования сигналов и управления и механизма коррекции дисбаланса. Причем вал выполнен полым и установлен на верхнем основании упругой опоры с возможностью вращения и связан с якорем привода, а дисковый статор привода установлен на верхнем основании упругой опоры на подшипниках с возможностью вращения так, что центр его массы совмещен с центром упругой опоры и плоскостью симметрии дискового якоря. Технический результат заключается в повышении точности балансировки. 2 н. и 5 з.п. ф-лы, 5 ил.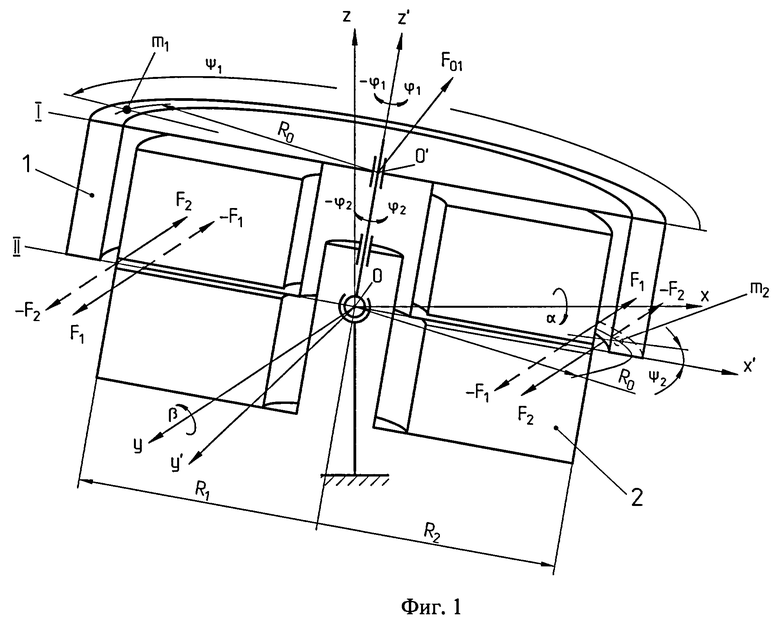
1. Способ автоматической балансировки ротора, характеризующийся совмещением во времени операций определения и устранения неуравновешенности, при котором ротору и соосному с ним уравновешенному телу сообщают угловое колебательное движение в плоскости, перпендикулярной их оси вращения, измеряют проекции возникающих от неуравновешенности угловых колебаний ротора относительно неподвижной точки на оси вращения, вычисляют величину и угловое положение неуравновешенности в одной из плоскостей коррекции и добавляют или удаляют корректирующую массу в установленное место в выбранной плоскости коррекции на роторе, отличающийся тем, что ротору и уравновешенному телу сообщают угловые колебательные движения противоположных направлений вокруг их оси вращения, прикладывая одновременно в каждый момент времени по касательным знакопеременные моменты сил, одинаковые по величине, но противоположно направленные, и совмещают плоскость приложения знакопеременных моментов сил с неподвижной точкой на оси вращения и центром массы уравновешенного тела.
2. Способ по п.1, отличающийся тем, что в каждый момент времени измеряют угловое положение ротора вокруг оси вращения, суммируют его значение с вычисленным значением углового положения неуравновешенности на окружности радиуса приведения в одной из плоскостей коррекции и производят добавление или удаление корректирующей массы, равной вычисленному значению, в точке, угловое положение которой в неподвижной системе отсчета определяют по результатам суммирования.
3. Способ по п.1, отличающийся тем, что результат измерения массы неуравновешенности в одной из плоскостей коррекции представляют в виде проекций на три и более полуоси, расположенные в этой плоскости и исходящие из точки пересечения указанной плоскости и оси вращения так, что они пересекают окружности радиусов приведения в точках, являющихся геометрическими центрами мест устранения неуравновешенности, определяемыми конфигурацией ротора, и производят добавление или удаление корректирующих масс, равных вычисленным в проекциях значениям, в точках, угловое положение которых в неподвижной системе отсчета в каждый момент времени определяют как сумму текущего значения угла колебаний ротора вокруг оси вращения и заданных угловых положений соответствующих полуосей.
4. Способ по п.1, отличающийся тем, что плоскость приложения к ротору и уравновешенному телу одинаковых по величине, но противоположных по направлению знакопеременных моментов сил совмещают с одной из плоскостей коррекции, а измеренные проекции вектора вынужденных колебаний балансируемого ротора используют для определения и устранения неуравновешенности в другой плоскости коррекции.
5. Устройство для автоматической балансировки ротора, содержащее станину, упругую опору, жестко закрепленную нижним основанием на станине, вал установленный в подшипниках вертикально с соосно закрепленным на одном конце ротором и связанный с верхним основанием упругой опоры с возможностью его колебаний вокруг ее центра, привод угловых колебаний, установленный соосно с валом, выполненный в виде электрической машины с уравновешенными дисковыми статором и якорем, возвратную пружину, связанную одним концом с валом, источник переменного напряжения, соединенный с обмоткой якоря электрической машины, датчики измерения проекций колебаний вала вокруг центра упругой опоры относительно вертикальной оси, блоки преобразования сигналов, блок управления и управляемые механизмы коррекции дисбаланса, выполненные в виде герметичных емкостей, заполненных корректирующим веществом и снабженные соплами и управляемыми нагнетателями, вход каждого из которых соединен с соответствующим выходом блока управления, отличающееся тем, что вал выполнен полым, установлен на верхнем основании упругой опоры с возможностью его вращения и жестко связан на другом конце с дисковым якорем электрической машины, а дисковый статор электрической машины установлен на верхнем основании упругой опоры на подшипниках с возможностью вращения так, что центр его массы совмещен с плоскостью симметрии дискового якоря и находится в одной плоскости с центром упругой опоры, в устройство введена вторая возвратная пружина, соединенная одним концом с статором, а другим - с вторым концом первой возвратной пружины и верхним основанием упругой опоры в точке, расположенной на оси вала, причем жесткости каждой возвратной пружины выбирают из условия равенства собственных частот колебаний статора и колебаний жестко связанных между собой якоря, полого вала и ротора относительно верхнего основания упругой опоры соответственно.
6. Устройство по п.5, отличающееся тем, что в него дополнительно введен датчик угла колебаний ротора вокруг оси, установленный на полом валу, блок измерения угла колебаний ротора, соединенный своим входом с выходом датчика угла колебаний ротора, блок измерения величины неуравновешенности, соединенный своими входами с выходами блоков преобразования сигналов, блок измерения угла расположения неуравновешенности, соединенный своими входами с выходами блоков преобразования сигналов, электрический привод углового движения, установленный над корректируемой плоскостью ротора соосно с его осью так, что статор электрического привода жестко связан со станиной, кронштейн изменяемой длины, установленный на валу электрического привода углового движения перпендикулярно его оси и связанный с механизмом коррекции дисбаланса с возможностью регулирования его радиуса вращения вокруг оси ротора, датчик углового положения механизма коррекции дисбаланса, установленный на электрическом приводе углового движения, блок измерения углового положения механизма коррекции дисбаланса, соединенный своим входом с выходом датчика измерения углового положения механизма коррекции дисбаланса, дифференциальный усилитель, соединенный первым входом с выходом блока измерения углового положения механизма коррекции дисбаланса, а выходом - с входом электрического привода углового движения, сумматор, соединенный своим первым входом с выходом блока измерения угла расположения неуравновешенности, и пороговое устройство, соединенное своим входом с выходом дифференциального усилителя, выход порогового устройства соединен с первым входом блока управления механизма коррекции дисбаланса, второй вход которого соединен с выходом блока измерения величины неуравновешенности, второй вход сумматора соединен с выходом блока измерения углового положения механизма коррекции дисбаланса, а выход сумматора - с вторым входом дифференциального усилителя, величина коэффициента усиления которого выбрана такой, при которой амплитуда и фаза угловых колебаний сопла управляемого механизма коррекции дисбаланса вокруг оси вращения электрического привода углового движения равны соответственно амплитуде и фазе угловых колебаний ротора вокруг его оси, а угловое положение оси сопла в каждый момент времени равно вычисленному значению углового положения точки введения корректирующего вещества.
7. Устройство по п.5, отличающееся тем, что в него дополнительно введены блок измерения проекций неуравновешенности на полуоси коррекции, соединенный своими входами с выходами преобразователей сигнала, а своими выходами с входами блока управления механизмами коррекции дисбаланса, и платформа, выполненная в виде диска с радиальными пазами, количество которых и их угловое расположение на диске соответствует числу и угловому расположению точек центров геометрических мест введения корректирующего вещества, определяемых конфигурацией ротора, а платформа установлена соосно на валу электрического привода углового движения, управляемые механизмы коррекции дисбаланса установлены в пазах платформы так, что оси каждого из их сопел совмещены с точками геометрических центров мест ротора для введения корректирующего вещества.
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИДЕТАЛЕЙ | 0 |
|
SU289325A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2003 |
|
RU2241969C1 |
| Устройство для балансировки | 1984 |
|
SU1193476A1 |
| US 6430992 B1, 13.08.2002. | |||

