Изобретение относится к авиационной технике, в частности к вертолетам, и преимущественно может быть использовано в несущей системе вертолета.
Целью изобретения является улучшение аэродинамических характеристик несущего винта при полете в самолетном режиме.
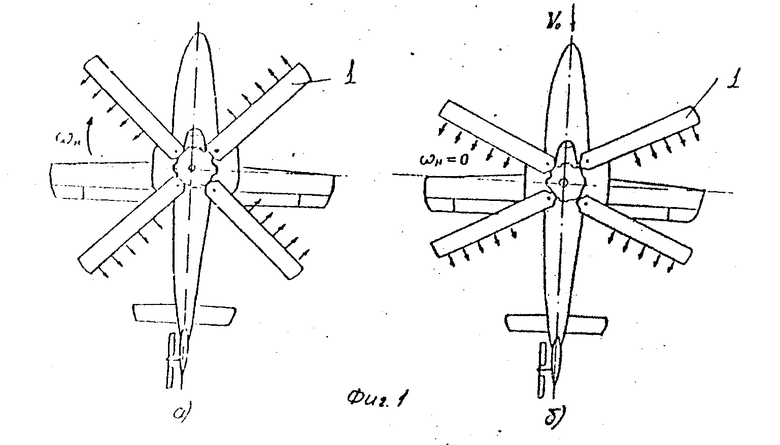
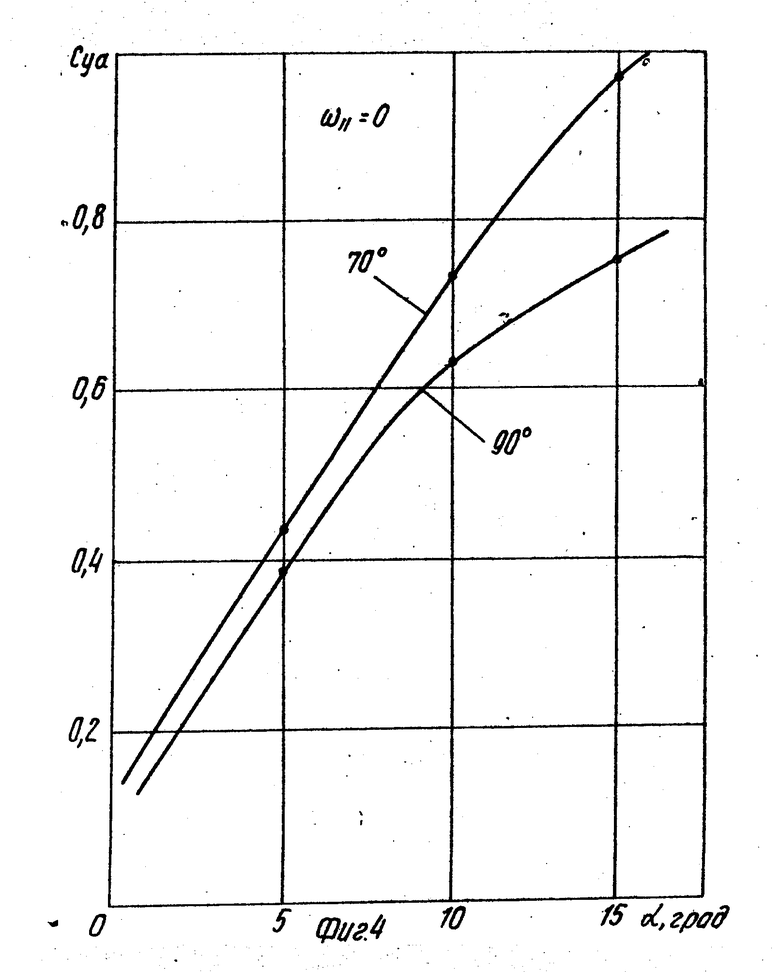
На фиг.1 изображена схема винтокрылого ЛА с несущей системой НВ-крыло на вертолетном а (слева) и самолетном б режимах; на фиг.2 конструктивно-компоновочная схема крепления лопасти к втулке, где 1 лопасть, 2 воздуховоды, 3 осевой шарнир, 4 рычаг поворота лопасти, 5 тарелка автомата перекоса, 6 вертикальный шарнир, 7 узел крепления втулки системы НВ-крыло, 8 шарико-винтовой механизм с электроприводом, 9 цапфа вертикального шарнира, 10 узел крепления лопасти к осевому шарниру; на фиг.3 в изометрии конструктивно-компоновочная схема системы НВ-крыло с консолями 1, с пневматической системой управления полетом 11, тормозом вращения лопастей с узлом фиксации и запирания 12, вертикальными шарнирами 6, шарико-винтовыми механизмами для поворота лопастей 8; на фиг.4 графики зависимости коэффициента подъемной силы системы НВ- крыло от угла атаки Суа f(α) при ωн 0.
Предлагаемая авторами конструкция содержит (фиг.2): четыре несущих лопасти (консоли) 1, которые крепятся к втулке несущего винта при помощи узлов крепления 10, осевые шарниры 3, необходимые для изменения общего шага винта; перед осевыми шарнирами (со стороны втулки) находятся вертикальные шарниры 6, позволяющие перемещаться консолям в плоскости, перпендикулярной оси вращения втулки; узел 7 служит для крепления втулки на валу редуктора; рычаг 4 нужен для изменения угла атаки лопасти (консоли); тарелка автомата перекоса 5 служит для циклического изменения угла атаки лопастей; шарико-винтовой механизм с электроприводом 8, предназначенный для перемещения лопасти в плоскости, перпендикулярной оси вращения втулки, крепится к цапфе вертикального шарнира 9; через воздуховоды 2 подводится сжатый воздух в полости консолей для создания циркуляции воздуха вокруг них; подача этого воздуха регулируется пневматической системой 11 (фиг.3); тормоз 12 (см. фиг.3) с узлом фиксации и запирания предназначен для остановки винта в полете при переходе на самолетный режим.
Устройство работает следующим образом.
При полете винтокрылого летательного аппарата, на котором установлено предлагаемое устройство, на режиме висения и малых дозвуковых скоростях лопасти находятся по отношению друг к другу под углом в 90о (в плоскости вращения втулки). При переходе на самолетный режим втулка винта затормаживается до ωн 0 при помощи тормоза и фиксируется в неподвижном положении. Одновременно с окончанием торможения изменяется угол между лопастями. Лопасти поворачиваются вокруг вертикального шарнира 6 (фиг.2) при помощи шарико-винтовых механизмов с электроприводом 8. В результате винт в плане становится не крестообразным, а Х-образным (фиг.1). Таким образом в самолетном режиме консоли устанавливаются с меньшим углом стреловидности по отношению к набегающему потоку (угол стреловидности χ 30о), что и позволяет улучшить несущие свойства системы НВ-крыло.
Преимущества заявляемого изобретения были подтверждены результатами полунатурного эксперимента в аэродинамической трубе малых скоростей. Замерялись тяговые характеристики модели системы НВ-крыло с изменяемым азимутальным углом между лопастями. При продувке системы НВ-крыло на самолетном режиме (ωн 0) несущие свойства Х-винта (Ψ 70о) намного лучше, чем у крестообразного (Ψ 90о), что наглядно видно из графиков, представленных на фиг.4. Был специально проведен расчет параметров шарико-винтового механизма (поз.8 фиг.2).
При расчете шарико-винтового механизма необходимо учитывать особенности его работы.
С целью уменьшения массы, мощности и габаритов электрического привода изменение углов между лопастями осуществляется только на самолетном режиме. Однако при этом необходимо учитывать, что сам шарико-винтовой механизм должен выдерживать нагрузку при максимальном нагружении, то есть в вертолетном режиме работы.
Определим осевую силу, действующую на шарико-винтовой механизм по формуле
Fa , где Ха сила лобового сопротивления;
, где Ха сила лобового сопротивления;
I плечо действия силы лобового сопротивления;
L плечо действия силы шарико-винтового механизма относительно вертикального шарнира.
Получаем Xа C Sом 0,01
Sом 0,01  243,2 30460,8 H
243,2 30460,8 H
Тогда
Fa=  609214, H
609214, H
Исходя из этого значения осевой силы рассчитываем диаметр винта по формуле
d1 1,2  где [ny] 2,5-5 допускаемый коэффициент запаса устойчивости;
где [ny] 2,5-5 допускаемый коэффициент запаса устойчивости;
μ 0,5 коэффициент приведения длины винта, зависящей от условий закрепления винта;
I 0,05 м осевое перемещение;
Е 1,1 х 1011, Па модуль упругости для материала, из которого изготовлен винт. Винт изготовлен из стали 20Х3МВФ с азотированием поверхности.
Тогда получаем
d1 1,2 2,5·102, м
2,5·102, м
В соответствии со стандартами подбираем остальные размеры шарико-винтового механизма:
do 30 мм средний диаметр резьбы;
Dr 34,80 мм наружный диаметр резьбы гайки;
dш 4,763 мм диаметр шарика;
Р 5 мм шаг резьбы;
rn 1,68 мм радиус профиля каналов в винте и гайке;
ϕ 4о15' угол подъема винтовой линии резьбы на среднем диаметре;
dк 120 мм диаметр корпуса;
L 450 мм длина шарико-винтового механизма.
Подберем электродвигатель для привода шарико-винтового механизма. Так как он будет только в самолетном режиме, то и все расчеты будут только для самолетного режима.
Определяем номинальную величину осевой нагрузки:
Fa , где
, где  =
= =0,02
=0,02 H.
H.
Тогда Fa 26000, H.
26000, H.
Определяем мощность на выходном конце штока
Wвых Fa. Lмакс/103. tp, где Lмакс 43 мм максимальный ход штока;
tp 3 с продолжительность рабочего хода.
Тогда Wвых Wвых 508, Вт
508, Вт
Определим требуемую мощность двигателя:
Wдв Wвых/(ηпр˙ηшп), где ηпр 0,95 коэффициент полезного действия промежуточной зубчатой передачи;
ηшп 0,97 коэффициент шарико-винтовой пары.
Получаем Wдв 551,28, Вт
551,28, Вт
На основании этого расчета подбираем типовой электродвигатель повторно-кратковременного режима Д-500 ТВ, имеющего следующие основные технические данные:
Wдв 500 Вт мощность двигателя;
U 27 В напряжение;
n 1000 об/мин частота вращения вала;
m 4,1 кг масса электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |

Изобретение относится к авиационной технике, в частности к вертолетам, и преимущественно может быть использовано в несущей системе вертолета. Целью изобретения является улучшение аэродинамических характеристик несущего винта при полете в самолетном режиме. Конструкция содержит четыре несущих лопасти-консоли 1, которые крепятся к втулке несущего винта при помощи узлов крепления 10, осевые шарниры 3, необходимые для изменения общего шага винта. Перед осевыми шарнирами со стороны втулки находятся вертикальные шарниры 6, позволяющие перемещаться консолям в плоскости, перпендикулярной оси вращения втулки. Узел 7 служит для крепления втулки на валу редуктора. Рычаг 4 нужен для изменения угла атаки лопасти-консоли. Тарелка автомата перекоса 5 служит для циклического изменения угла атаки лопастей1. Шарико-винтовой механизм с электропроводом 8, предназначенный для перемещения лопасти в плоскости, перпендикулярной оси вращения втулки, крепится к цапфе вертикального шаринира 9. Через воздуховоды 2 подводится сжатый воздух в полости консолей для создания циркуляции воздуха вокруг них. Подача этого воздуха регулируется пневманической системой 2. Тормоз 3 с узлом фиксации и запирания предназначен для остановки винта в полете при переходе на самостоятельный режим. 4 ил.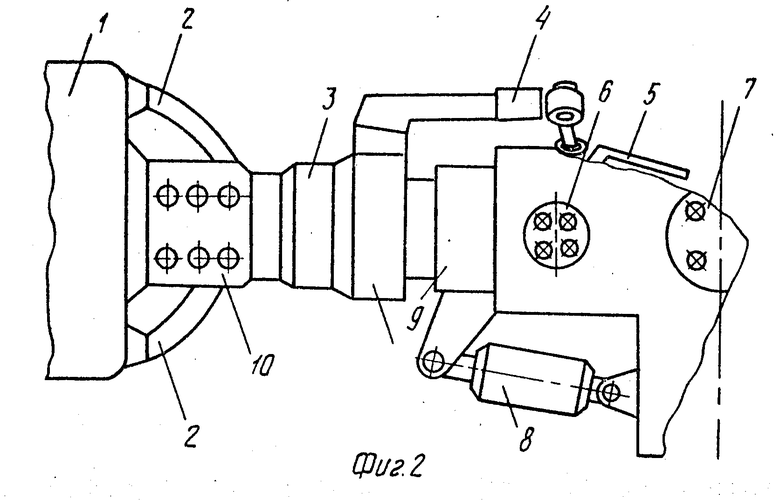
ПРЕОБРАЗУЕМЫЙ НЕСУЩИЙ ВИНТ преимущественно комбинированного летательного аппарата, содержащий втулку винта, четыре лопасти с симметричным профилем, установленные на втулке на осевом шарнире под углом 90o друг к другу, пневматическую систему, тормоз вращения лопастей и узел фиксации и запирания лопастей в неподвижном положении, отличающийся тем, что, с целью улучшения аэродинамических характеристик несущего винта при полете и самолетном режиме, винт снабжен вертикальными шарнирами крепления лопастей, размещенными на втулке, и шарнирно-винтовыми механизмами с электроприводом на каждую лопасть, связывающими дополнительно лопасть через кронштейн с втулкой.
| Аэродинамика летательных аппаратов и гидравлика из систем | |||
| М.: ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, 1991, с.142. |
