Изобретение относится к измерительной технике, предназначено для измерения вертикального градиента ускорения силы тяжести Wzz и ускорения силы тяжести д.
Целью предлагаемого изобретения является повышение точности измерения вертикального градиента и получение возможности измерения ускорения силы тяжести, т.е. расширение функциональных возможностей измерителя.
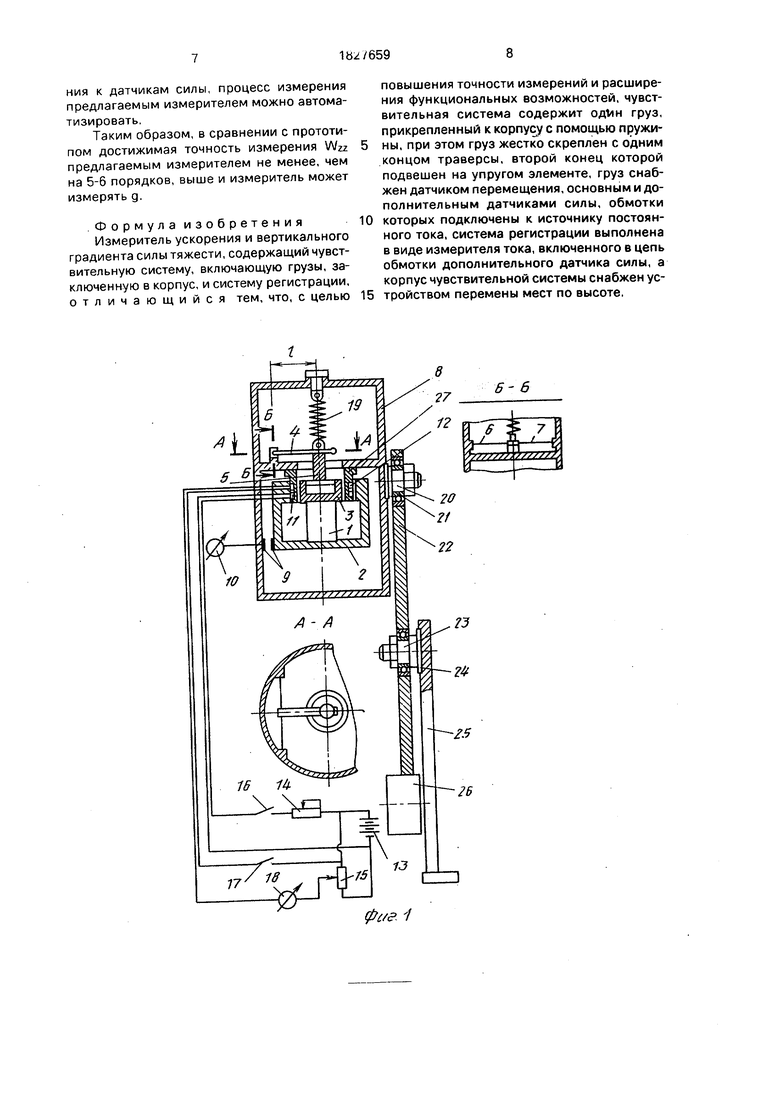
На фиг. 1 представлена принципиальная схема предлагаемого измерителя вертикального градиента и ускорения силы тяжести.
Его чувствительная система содержит только один груз, например, в виде постоянного магнита 1, магнитопровода 2, полюсно- го наконечника 3, который снабжен траверсой 4. Один конец траверсы 4 через опору 5 жестко связан с грузом, а другой конец подвешен на упругом элементе, например, в виде горизонтально расположенных нитей или торсионов 6,7, закрепленных в корпусе 8. Груз снабжен датчиком перемещения 9, например, индуктивным (или емкостным или растровым фотоэлектрическим первичным преобразователем с разрешающей способностью, равной десятым долям микрона. Выход датчика перемещения 9 соединен с указателем перемещения 10, например, в виде амперметра в случае индуктивного датчика перемещения. Груз снабжен основным датчиком силы в виде постоянного магнита 1, магнитопровода 2, полюсного наконечника 3 и обмотки 11 и дополнительным датчиком силы в виде постоянного магнита 1, магнитопровода 2, полюсного наконечника 3 и обмотки 12. Обмотки 11.12 подключены к источнику постоянного тока 13 через устройства изменения величины питающего тока (или напряжения), например, в виде переменных сопротивлений 14, 15 и контактным переключателем 16, 17. В цепи обмотки 12 установлен указатель тока 18, по значениям которого определяется Wzz (указатель может быть отградуирован сразу в размерности WZz). Груз подвешен также на пружине
сл
с
00
ю
VJ
о сл ю
19, снабженной устройством перемещения по вертикали ее верхнего конца (на чертеже устройство не показано).
Корпус 8 цапфой 20 с помощью опоры 21 установлен в штангу 22 устройства перемены мест корпуса 8 с чувствительной системой по высоте. Штанга 22 с помощью цапфы 23 и опоры 24 установлена на подставке 25. На штанге 22 предусмотрен противовес 26 (для уравновешивания корпуса 8 с чувствительной системой).
Поворотом штанги 22 корпус 8 с чувствительной системой может изменять свое положение по высоте. Предусмотрены арретиры (не показанные на чертеже) для арре- тирования штанги 22 с корпусом 8 в верхнем и нижнем положениях.
Датчик перемещения 9 при изготовления (сборке) измерителя устанавливается -в нулевое положение (нулевое показание указателя перемещения 10) при горизонтальном положении траверсы 4.
В рабочем положении измерительная ось чувствительной системы (ось симметрии груза) располагается по направлению силы тяжести.
Корпус 8 герметизируется и может ваку- умироваться. Для затухания колебаний груза предусматривается демпфирование (например, за счет соответствующих зазоров между магнитопроводом 2, наконечником 3 и каркасом 27 обмоток 11, 12 в случае невакуумированного корпуса 8).
Устройство перемены мест по высоте чувствительной системы может иметь и другое конструктивное оформление, например, перенос корпуса 8 вручную с площадки на одной высоте на площадку другой высоты и
др.
В рассматриваемом примере принципиальной схемы измерителя в качестве груза используется постоянный магнит с магнитопроводом, а можно наоборот, магнитопровод с магнитом закрепить на корпусе неподвижно, а в качестве груза подвесить каркас 26 с катушками 11, 12.
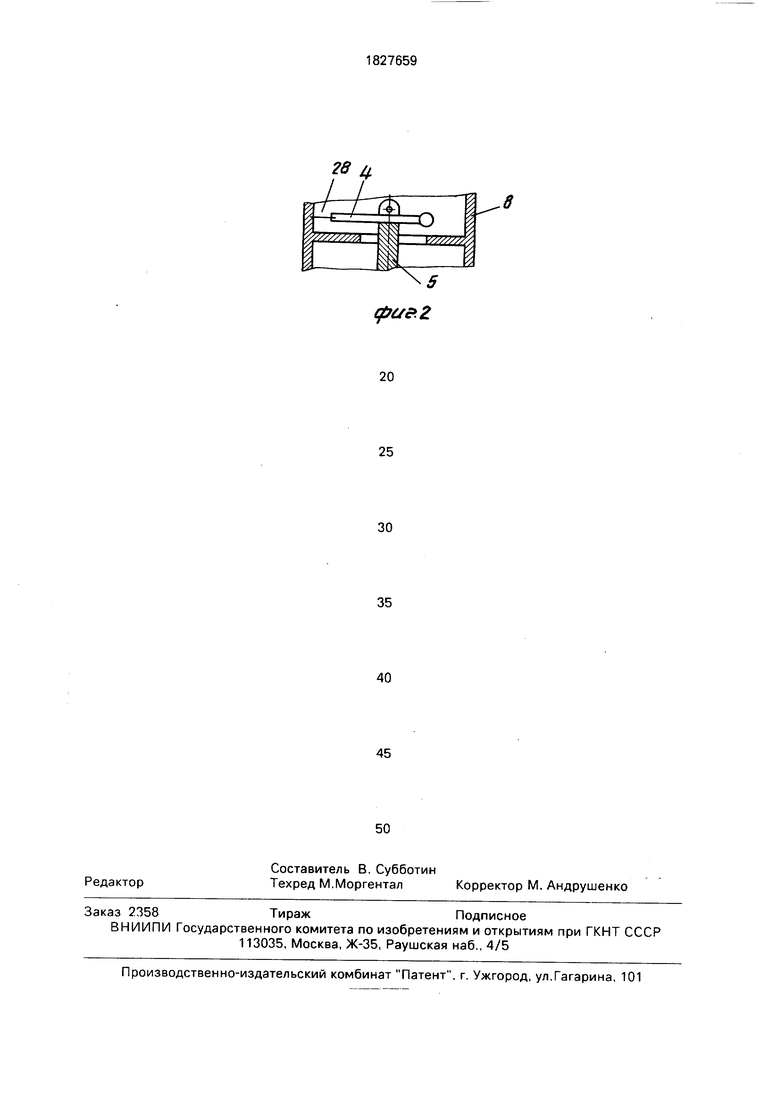
Вместо пружины 19 может использоваться и др. упругий элемент, например, в виде поплавка, выступающего над поверхностью жидкости, когда в качестве упругой силы используется Архимедова сила и др. Упругий элемент подвеса траверсы 4 может быть выполнен и в виде плоской пружины 28 (см. фиг.2), один конец которой скреплен с траверсой 4, и другой конец - с корпусом 8.
Предлагаемый измеритель работает следующим образом.
Определение измеряемой величины производится алгоритмическим методом в два такта измерения.
Первый такт. Контактный переключатель 16 замкнут, контактный переключатель 17 разомкнут, корпус 8 с чувствительной системой установлен в верхнее положение.
Изменением величины питающего напряжения обмотки 11 основного датчика силы сопротивлением 14 устанавливается нулевое показание указателя перемещения 10. Окончательная установка нулевого показания может производиться перемещением верхнего конца пружины 19 микрометрическим винтом (на чертеже не показан).
В результате сила тяжести груза уравновешивается силой основного датчика силы и
силами механических пружин
mg FAci+ +cs,
0)
где m - масса груза;
g - ускорение силы тяжести на уровне центра тяжести груза в верхнем положении;
РдС1 - сила основного датчика силы; t - суммарная угловая жесткость нитей
6,7;
р - угол поворота траверсы 4 от нейтрального положения;
I - расстояние от оси симметрии груза до нитей 6, 7 (см. чертеж);
с - линейная жесткость пружины 19; s - величина растяжения пружины 19.
35
р arctg -,
(2)
где z - отклонение груза от расчетного нулевого положения груза (т.е. отклонение от идеального нуля по указателю 10). Так как z«l, то с достаточной точностью можем положить
и из (1) и (3) имеем
mg FACi+ -J2-+CS, ,
(3)
(4) (5)
5
где В - магнитная индукция в зазоре между полюсным наконечником 3 и магнитопроводом 2;
LI - длина проводника обмотки 11;
и - ток в обмотке 11.
Второй такт. Корпус 8 с чувствительной системой устанавливаем в нижнее положение. В центре масс груза действует ускорение
g+WzZH,
(6)
где Н - расстояние по высоте между верхним и нижним положениями груза.
Под действием силы
m(g+WzzH)
происходит перемещение груза, величина z изменяется.
Контактный переключатель 17 замыкаем и изменением величины питающего напряжения обмотки 12 дополнительного датчика силы сопротивлением 15 устанавливаем нулевое показание указателя перемещения 10 и к грузу прикладывается сила Рдс2 дополнительного датчика силы. В результате имеем
Измеряя ток в обмотке 12 дополнительного датчика силы измерителем 18, отградуированным в соответствии с формулой (11) и формулой (8), получаем значения WZz.
Относительная погрешность измерения по (11) равна (5)
п
Wtz
Г + 1р. + 3 ,
(12)
где
15
(13)
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО ГРАДИЕНТА И УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1990 |
|
RU2037163C1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1990 |
|
RU2033632C1 |
| Прецизионный вертикальный градиентометр | 1989 |
|
SU1836645A3 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |
| Гравитационный вертикальный градиентометр | 1991 |
|
SU1838804A3 |
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2003 |
|
RU2242011C2 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
Использование: измерительная техника, для измерения вертикального градиента и ускорения силы тяжести. Сущность изобретения: чувствительная система содержит только один груз, который (груз) снабжен траверсой, один конец которой жестко скреплен с грузом через опору, а другой конец подвешен на упругом элементе в виде нитей или торсионов, груз снабжен указателем перемещения, основным датчиком силы и дополнительным датчиком силы, чувствительная система снабжена устройством перемены мест по высоте. 2 ил.
m(g+WzzH)FAci+FAc2+ -& (z+ Az)+
+ c(s+Az),(7)
где РДс2 - сила дополнительного датчика силы;
Az - величина погрешности установки нулевого положения груза во втором такте относительно положения первого такта,
,
(8)
где - длина проводника обмотки 12;
i2 - ток в обмотке 12.
По двум тактам измерения из (4) и (7) имеем
Fgc2
Hm
+ | + с
Az
Нтг
(9)
Второе слагаемое за счет неопределенности Az дает инструментальную погрешность AWZZ от Az
А ,., , AZ
AWzzi Ь + с ш.
(10)
Задаваясь реальными значениями ,3 кГ, ,5 м, гсм2/сек2/2, с. 256, строка 22 снизу/, , н/м (, т.е. пружина 19 может отсутствовать), ,1 м, Д ,0-0,1 MK 10 fi-10 7M получим
AWZ2(1,33- ,67)Э
откуда видим, что AWZz можно обеспечить достаточно малым и из (9) определять WZz по формуле
Wzz
Fgc2
Hm
(11)
где А РДС2 - абсолютная погрешность измерения FAc2;
АН -абсолютная погрешность выдерживания Н.
Am - изменение массы груза (равно О, т.к. груз один и его масса неизменна).
Из (11), (12) видим, что методическая погрешность измерения от g в отличие от прототипа отсутствует. Так как по (8)
.
0
то ;i
АВ
В
+
AZ2
Z2
+
Ai2
12
(14)
5
0
5
0
5
и J/1 определяется только точностью измерения 2.
При щ, tft, 3 порядка 10 получаем по (12) значение г) того же порядка, т.е. при Э
AWZ2 ,04 Э
Для прототипа, как указано выше в данном описании и в известном значения 773 (и др. параметров) для обеспечения точности в 5 Э необходимо выдерживать в пределах 10 , т.е. жестче на 5 порядков и, т.о. точность предлагаемого градиентометра будет выше на 5-6 порядков в сравнении с прототипом.
Этот же измеритель позволяет измерять и д.
В частности для относительных измерений g достаточно в исходном пункте настроить измеритель по первому такту измерения (в верхнем или нижнем положении чувствительной системы) и при неизменном BiLi, И определять Ад, перенося измеритель в определяемые пункты наблюдения и выполняя второй такт по РДС2, т.е. по iz.
Совершенно очевидно, что, применяя компенсационные обратные связи с интегрирующими звеньями отдатчика перемещения к датчикам силы, процесс измерения предлагаемым измерителем можно автоматизировать.
Таким образом, в сравнении с прототипом достижимая точность измерения Wzz предлагаемым измерителем не менее, чем на 5-6 порядков, выше и измеритель может измерять д.
Формула изобретения Измеритель ускорения и вертикального градиента силы тяжести, содержащий чувствительную систему, включающую грузы, заключенную в корпус, и систему регистрации, отличающийся тем, что, с целью
0
повышения точности измерений и расширения функциональных возможностей, чувствительная система содержит OAVIH груз, прикрепленный к корпусу с помощью пружины, при этом груз жестко скреплен с одним концом траверсы, второй конец которой подвешен на упругом элементе, груз снабжен датчиком перемещения, основным и дополнительным датчиками силы, обмотки которых подключены к источнику постоянного тока, система регистрации выполнена в виде измерителя тока, включенного в цепь обмотки дополнительного датчика силы, а корпус чувствительной системы снабжен устройством перемены мест по высоте,
five i
| Юзефович А.П., Огородова Л.В | |||
| Гравиметрия, М.: Недра, 1980, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Там же, с | |||
| Аппарат для нагревания окружающей его воды | 1920 |
|
SU257A1 |
