Изобретение относится к измерительной технике, предназначено для измерения вертикального градиента силы тяжести Wzz и двух составляющих градиента кривизны уровенной поверхности потенциала силы тяжести Wxx, Wyy.
Известен гравитационный трехкомпонентный градиентометр Чена-Пайка, содержащий два акселерометра, ось чувствительности которых направлена под углом к направлению вертикали, и поворотное устройство вокруг вертикальной оси.
Этот градиентометр может быть использован только в специальных лабораторных условиях, так как его чувствительная система содержит акселерометры, установленные "жестко" (без перемены мест) на направлении оси чувствительности на расстоянии 0,16 м. Для измерения градиента с точностью до 1 Э требуемая точность измерения акселерометров равна 0,16- -1 ˙ 10-9 м/с2 1,6 ˙ 10-11g, что не достижимо в настоящее время в условиях эксплуатации гравиметрических измерителей, поскольку требования в этом случае к относительным погрешностям "одинаковости" и стабильности конструктивных параметров обоих акселерометров более высокие, чем 10-11. Эти условия в градиентометре Чена-Пайка выполняются установкой узла градиентометра в сосуд Дьюара с гелием со специальной подвеской и установкой всего этого "агрегата" в подземную лабораторию.
Целью изобретения является измерение градиентов силы тяжести в условиях эксплуатации гравиметрических измерителей.
Для достижения цели предусмотрен только один (вместо двух) акселерометр, который снабжен устройством перемены мест на направлении оси чувствительности, а масса чувствительной системы акселерометра подвешена на упругих пластинах и винтовой пружине, снабженной устройством перемещения ее верхнего конца, и снабжена указателем перемещения и датчиками силы.
В результате в предлагаемом градиентометре в разных местах на направлении оси чувствительности акселерометра используется один и тот же акселерометр, производится уравновешивание одной и той же массы чувствительной системы акселерометра с помощью указателя перемещения одними и теми же датчиками силы и механическими пружинами, упругие пластины позволяют обеспечить жесткость, близкую к нулю, перемещение верхнего конца винтовой пружины обеспечивает более точную установку положения массы в исходном положении. Ряд конструктивных параметров (например, масса чувствительной системы акселерометра и др.) за время измерения остаются неизменными, отпадает необходимость в обеспечении жестких требований к относительной погрешности и стабильности параметров в пределах 10-11, появляется возможность производить измерение в условиях эксплуатации гравиметрических измерителей. Таким образом, предлагаемый градиентометр в сравнении с прототипом обеспечивает измерение в условиях эксплуатации гравиметрических измерителей.
Не известны технические решения, признаки которых совпадают с отличительными признаками заявляемого технического решения, поэтому оно соответствует критерию "новизна".
Указанные признаки в предложенном градиентометре обеспечивают достижение нового свойства, а именно возможность измерения в условиях эксплуатации гравиметрических измерителей, что позволяет сделать вывод о соответствии заявленного решения критерию "существенные отличия".
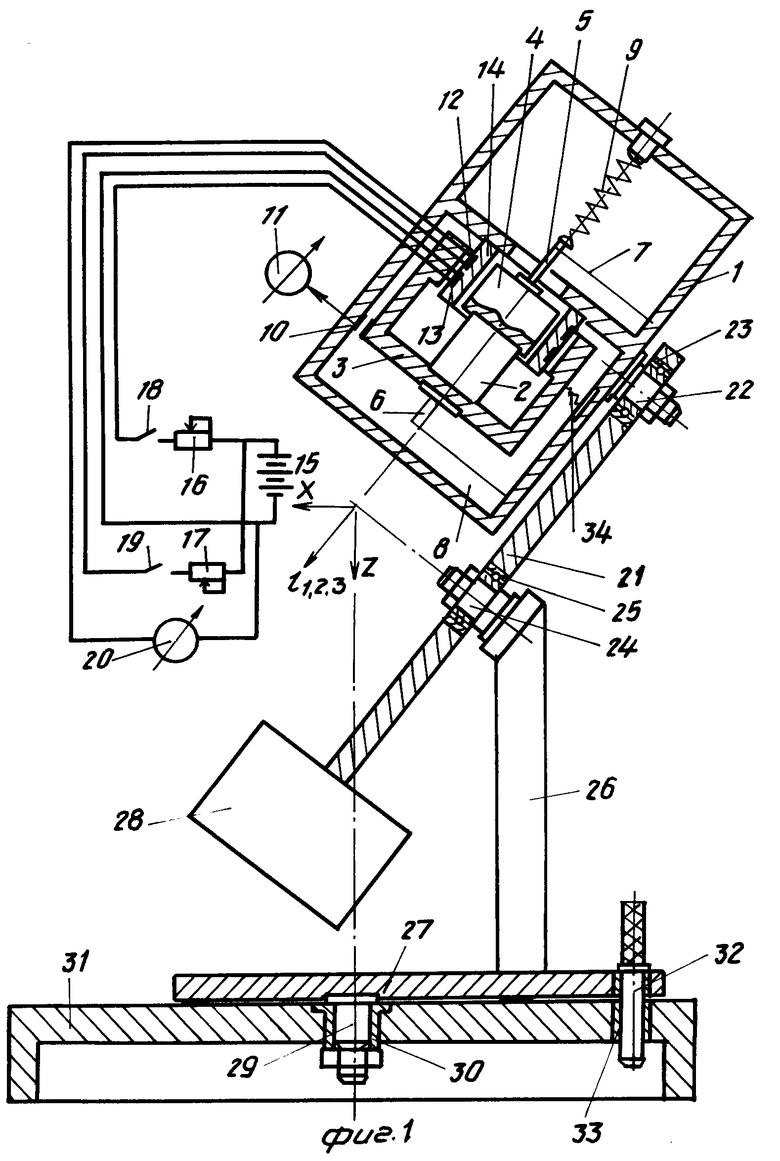
На фиг. 1 представлена принципиальная схема предлагаемого гравитационного трехкомпонентного градиентометра.
Градиентометр содержит акселерометр, который состоит из корпуса 1, чувствительной системы в виде массы из постоянного магнита 2, магнитопровода 3, полюсного наконечника 4 и опор 5, 6, подвешенной в корпусе 1 с помощью плоских пружин 7, 8 и винтовой пружины 9, снабженной устройством перемещения ее верхнего конца, например, в виде микрометрического винта (не показан). Масса чувствительной системы снабжена датчиком 10 перемещения с указателем 11 перемещения, основным датчиком силы в виде постоянного магнита 2, магнитопровода 3, полюсного наконечника 4 и обмотки 12 и дополнительным датчиком силы в виде тех же постоянного магнита 2, магнитопровода 3, полюсного наконечника 4 и обмотки 13. Обмотки 12, 13 установлены в каркасе 14 и подключены к источнику 15 постоянного тока через устройства изменения величины питающего тока (или напряжения), например, в виде переменных сопротивлений 16, 17 и через контактные переключатели 18, 19. В цепь питания обмотки 13 включен измеритель 20, например, тока со шкалой, отградуированной в величинах градиента силы тяжести в направлении оси чувствительности акселерометра. Ось чувствительности акселерометра (т.е. направление перемещения массы) устанавливается под углом Θ относительно к вертикального направления.
Акселерометр снабжен устройством перемены мест на направлении его оси чувствительности в виде штанги 21, в которой цапфой 22 установлен корпус 1 в опоре 23. Штанга 21 цапфой 24 установлена в опоре 25 стойки 26 поворотной плиты 27. Поворотом на 180о штанги 21 в опоре 25 и корпуса 1 акселерометра в опоре 23 меняется место положения акселерометра на направлении его оси чувствительности. Для арретирования акселерометра на штанге 21 и штанги 21 на стойке 26 предусмотрены арретиры (не показаны). На штанге 21 предусмотрен противовес 28 для уравновешивания акселерометра на опоре 25. Предусмотрено поворотное устройство вокруг вертикальной оси в виде поворотной плиты 27, установленной цапфой 29 в опоре 30 основания 31. Для установки поворотной плиты в трех положениях относительно основания 31 предусмотрены три равнорасположенных по окружности арретирующих устройства, например, в виде фиксатора 32 и трех направляющих втулок 33.
Датчик 10 перемещения при изготовлении (сборке) прибора устанавливается в нулевое положение (нулевое показание указателя 11 перемещения) при перпендикулярном (не деформированном) положении плоских пружин 7, 8 по отношению к направлению оси чувствительности акселерометра.
Корпус 1 акселерометра герметизируется и может вакуумироваться. Для затухания колебаний чувствительной массы акселерометра предусматривается демпфирование (например, за счет соответствующих зазоров между магнитопроводом 3, полюсным наконечником 4 и каркасом 14 обмоток 12, 13 в случае невакуумированного корпуса 1).
Для настройки требуемой жесткости плоских пружин 7, 8 может предусматриваться пружина 34 (для приложения продольной силы к пружинам 7, 8. Верхняя точка закрепления пружины 9 может быть и не в направлении оси чувствительности акселерометра. В этом случае сила в направлении оси чувствительности акселерометра от этой пружины определяется как проекция силы от пружины 9 на ось чувствительности акселерометра.
В рабочем положении градиентометра ось поворота плиты 27 устанавливается в вертикальное положение. При этом ось чувствительности акселерометра занимает положение под углом Θ к направлению вертикали.
Для определения Wzz, Wxx, Wyy измерения производятся в трех азимутах α. Азимут устанавливается начальной выставкой основания 31 и поворотом плиты 27.
В рассматриваемом примере принципиальной схемы градиентометра в качестве массы акселерометра используется постоянный магнит с магнитопроводом, а можно наоборот магнитопровод с магнитом закрепить на корпусе, а в качестве массы подвесить каркас 14 с обмотками 12, 13.
Предлагаемый измеритель работает следующим образом (определение измеряемых величин производится алгоритмическим методом в несколько тактов измерения).
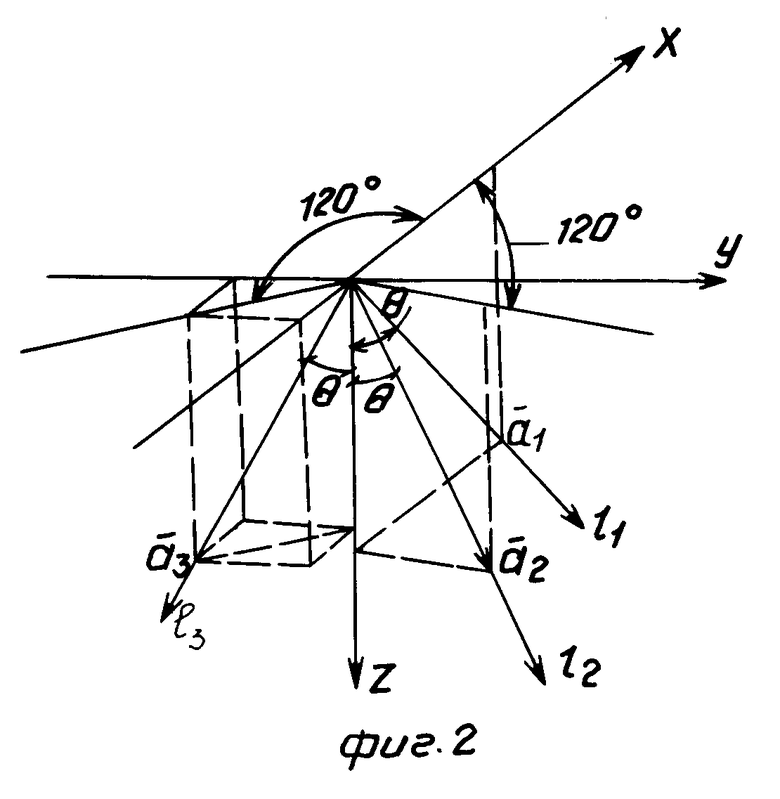
Первый такт. Корпус 1 акселерометра с чувствительной системой установлен в верхнее положение. Контактный переключатель 18 замкнут, переключатель 19 разомкнут. Ось чувствительности акселерометра устанавливается в плоскость меридиана. Ось х (фиг. 1) направлена на север, ось y на восток (перпендикулярно плоскости чертежа от нас), т.е. устанавливается начальный азимут α== 0. Система координат x, y, z и положение в ней соответствующих векторов показаны на фиг. 2.
Изменением величины питающего напряжения обмотки 12 основного датчика силы сопротивлением 16 устанавливается нулевое показание указателя 11 перемещения. Окончательная установка нулевого показания может производится перемещением верхнего конца пружины микрометрическим винтом. В результате имеют
mge11 Fд.с1 + с1L + c2z, (1) где m масса чувствительной системы акселерометра;
ge11 составляющая силы тяжести единичной массы в направлении оси чувствительности акселерометра l1;
Fд.с1 сила, прикладываемая к массе основным датчиком силы;
с1 суммарная жесткость плоских пружин 7, 8;
с2 жесткость пружины 9;
L отклонение массы чувствительной системы акселерометра от "идеального пути", при индуктивном датчике перемещения может иметь значение порядка 1 мкм;
z величина растяжения пружины 9;
g =
=  ; (2)
; (2)
Fд.с1 BL1i, (3) где w потенциал силы тяжести;
l1 направление оси чувствительности акселерометра в первом такте измерения,
B магнитная индукция в зазоре между полюсным наконечником 4 и магнитопроводом 3;
L1 длина проводника обмотки 12;
i ток в обмотке 12.
Второй такт. Корпус 1 акселерометра с чувствительной системой поворотом штанги 21 на 180о и поворотом в опоре 23 устанавливается в нижнее положение. Масса чувствительной системы под действием другого (в этом положении) значения составляющей силы тяжести по направлению l1занимает новое положение относительно корпуса. Это перемещение ΔZ "снимается" с указателя 11 перемещения.
Имеют
mge12 Fд.с1 + c1(L + Δz) + c2(z + Δz), (4) где ge12 составляющая силы тяжести единичной массы в направлении оси чувствительности l1 при втором такте измерения.
Считая вторые производные потенциала постоянными в объеме, занимаемом чувствительной системой при двух тактах измерения, и считая неизменными B, L1, i за время двух тактов измерения, находят из выражений (1) и (4)
 W
W =
= 
 (5) где
(5) где  вектор второй производной потенциала силы тяжести в направлении l1;
вектор второй производной потенциала силы тяжести в направлении l1;
Н расстояние между центрами масс чувствительной системы при верхнем и нижнем положении акселерометра (при повороте штанги 21 на 180о).
Н Но + Δz, (6) где Но расстояние между центрами масс при верхнем и нижнем положении акселерометра при Δz 0.
Положение вектора  , полученного в первом и втором тактах измерения, показано на фиг. 2.
, полученного в первом и втором тактах измерения, показано на фиг. 2.
Можно во втором также выполнить дополнительно следующее. С помощью дополнительного датчика силы (обмотка 13) изменением величины питающего напряжения сопротивлением 17 установить Δz 0. Тогда
a1=
 , (7) где Fд.с2 сила, прикладываемая к массе чувствительной системы.
, (7) где Fд.с2 сила, прикладываемая к массе чувствительной системы.
Fд.с2 BL2i, (8) где L2 длина проводника обмотки 13.
Значения Fд.с2 наблюдаются по указателю 20.
Выполняя аналогично первому и второму тактам третий, четвертый и пятый, шестой такты при азимутах α= 120о, α= 240о, получают значения вторых производных потенциала силы тяжести по направлениям l2 и l3, равные соответственно  и
и  (фиг. 2), модули которых обозначают через а2 и а3.
(фиг. 2), модули которых обозначают через а2 и а3.
Из фиг. 2 имеют
Wxx [a1 (a2 + a3) sin30o] sin Θ;
Wyy (a2 a3) sin Θ cos30o; (9)
Wzz (a1 + a2 + a3) cos Θ.
Поскольку за время каждой пары тактов измерений B, L1, i практически неизменны, то из выражений (5), (7), (9) видим, что для обеспечения относительной погрешности порядка 10-4 10-5 (или абсолютной погрешности измерения (10-4 10-5) ˙ 4000 Э=0,4 0,04 Э) требования к относительным погрешностям, стабильности и тому подобных конструктивных параметров градиентометра не 10-11, как в прототипе, а порядка 10-4 10-5, что имеет порядок требований не выше, чем к применяемым в настоящее время акселерометрам, гравиметрам и другим измерителям и, таким образом, предлагаемым градиентометром можно производить измерения в условиях эксплуатации гравиметрических измерителей.
Таким образом, в сравнении с прототипом, который может работать только в специальных лабораторных условиях, предлагаемый градиентометр может производить измерения в условиях эксплуатации существующих гравиметрических измерителей.
Предлагаемый градиентометр имеет следующие существенные преимущества перед прототипом: значительное снижение веса измерителя (в десятки, а возможно и в сотни раз), значительное снижение трудоемкости, более простая эксплуатация и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО ГРАДИЕНТА И УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1990 |
|
RU2037163C1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |
| Прецизионный вертикальный градиентометр | 1989 |
|
SU1836645A3 |
| Измеритель ускорения и вертикального градиента силы тяжести | 1991 |
|
SU1827659A1 |
| Гравитационный вертикальный градиентометр | 1991 |
|
SU1838804A3 |
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2003 |
|
RU2242717C2 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
Использование: в гравиметрическом приборостроении. Сущность изобретения: градиентометр содержит измерительное устройство и акселерометр, заключенный в корпус и включающий чувствительную систему с упруго закрепленной инертной массой, при этом ось чувствительности акселерометра образует угол с направлением вертикали, а корпус акселерометра установлен с возможностью поворота относительно вертикальной оси, инертная масса чувствительности системы акселерометра выполнена в виде постоянного магнита, магнитопровода и полюсного наконечника и подвешена в корпусе посредством направляющих пружин и винтовой пружины, верхний конец которой установлен с возможностью перемещения по вертикали, причем масса чувствительной системы снабжена указателем перемещения, основным и дополнительным датчиками силы, обмотки которых подключены к источнику постоянного тока, измерительное устройство выполнено в виде измерителя тока, включенного в цепь питания обмотки дополнительного датчика силы, а корпус акселерометра установлен с дополнительной возможностью перемещения по направлению оси чувствительности акселерометра. 2 ил.
ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР, содержащий измерительное устройство и акселерометр, заключенный в корпус и включающий в себя чувствительную систему с упруго закрепленной инерционной массой, при этом ось чувствительности акселерометра образует угол с направлением вертикали, а корпус акселерометра установлен с возможностью поворота относительно вертикальной оси, отличающийся тем, что, с целью расширения функциональных возможностей, инерционная масса чувствительной системы акселерометра подвешена в корпусе посредством направляющих пружин и винтовой пружины, верхний конец которой установлен с возможностью перемещения по вертикали, при этом инерционная масса чувствительной системы снабжена указателем перемещения, основным и дополнительным датчиками силы, обмотки которых подключены к источнику постоянного тока, измерительное устройство выполнено в виде измерителя тока, включенного в цепь питания обмотки дополнительного датчика силы, а корпус акселерометра установлен с дополнительной возможностью перемещения по направлению оси чувствительности акселерометра.
| H.A | |||
| Chan and H.Y.Paik | |||
| Superconducting gravity gradiometer | |||
| Physical Revicu D | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
