Изобретение относится к измерительной технике и предназначено для измерения вертикального градиента ускорения силы тяжести Wzz и двух составляющих градиента кривизны уровенной поверхности потенциала силы тяжести Wxx, Wyy.
Известен гравитационный трехкомпонентный градиентометр Чена-Пайка, содержащий два акселерометра на разных высотах, оси чувствительности которых расположены на одной оси, направленной под углом к направлению вертикали, поворотное устройство вокруг вертикальной оси на три позиции и регистрирующее устройство. Этот градиентометр принимаем за прототип.
Этот градиентометр может быть использован только в специальных лабораторных условиях, так как содержит два акселерометра, установленные на расстоянии 0,16 м. Для определения компонент градиента ускорения силы тяжести используется разность сигналов двух акселерометров, которая за счет неодинаковости статических характеристик акселерометров содержит и ускорение, и градиент силы тяжести, и отделить ускорение от градиента в условиях эксплуатации гравиметрических приборов не удается.
Для измерения градиента, например, с точностью 1 Э допускается абсолютная погрешность измерения акселерометров, равная 0,16˙10-9 м/с2 1,6˙10-11 g. Разность крутизны статических характеpистик акселерометров (т.е. разность чувствительностей акселерометров) должна также обеспечить абсолютную погрешность в этих же пределах, что не достижимо в настоящее время в условиях эксплуатации гравиметрических измерителей.
В градиентометре Чена-Пайка это достигается установкой узла градиентометра в сосуд Дюара с гелием со специальной подвеской и установкой всего этого агрегата большего веса в подземную лабораторию. Использовать такую установку в условиях эксплуатации невозможно.
Техническим результатом изобретения является измерение градиентов силы тяжести в условиях эксплуатации гравиметрических измерителей.
Для достижения указанного технического результата градиентометр снабжен третьим акселерометром, вход датчика силы электрической пружины которого соединен с входом дополнительно предусмотренных датчиков силы двух других акселерометров, а входы датчиков силы электрических пружин этих двух акселерометров соединены с входом счетно-решающего блока.
В результате в предлагаемом градиентометре получают два сигнала, т.е. две разности, с двух датчиков силы электрических пружин двух акселерометров, зависящих от проекции ускорения силы тяжести g и градиентов на ось чувствительности прибора, и, таким образом, из двух соотношений, связывающих ускорение силы тяжести и градиент, можно найти (отдельно) и градиент, и ускорение силы тяжести, т.е. отделяется градиент ускорения силы тяжести без "баснословных" требований к акселерометрам.
Таким образом, предлагаемый градиентометр в сравнении с прототипом обеспечивает измерение в условиях эксплуатации гравиметрических измерителей.
Не известны технические решения, признаки которых совпадают с отличительными признаками заявляемого технического решения, поэтому оно соответствует критерию "новизна".
Указанные признаки в предложенном градиентометре обеспечивают достижение нового свойства, а именно возможность измерения в условиях эксплуатации гравиметрических измерителей, что позволяет сделать вывод о соответствии заявленного решения критерию "существенные отличия".
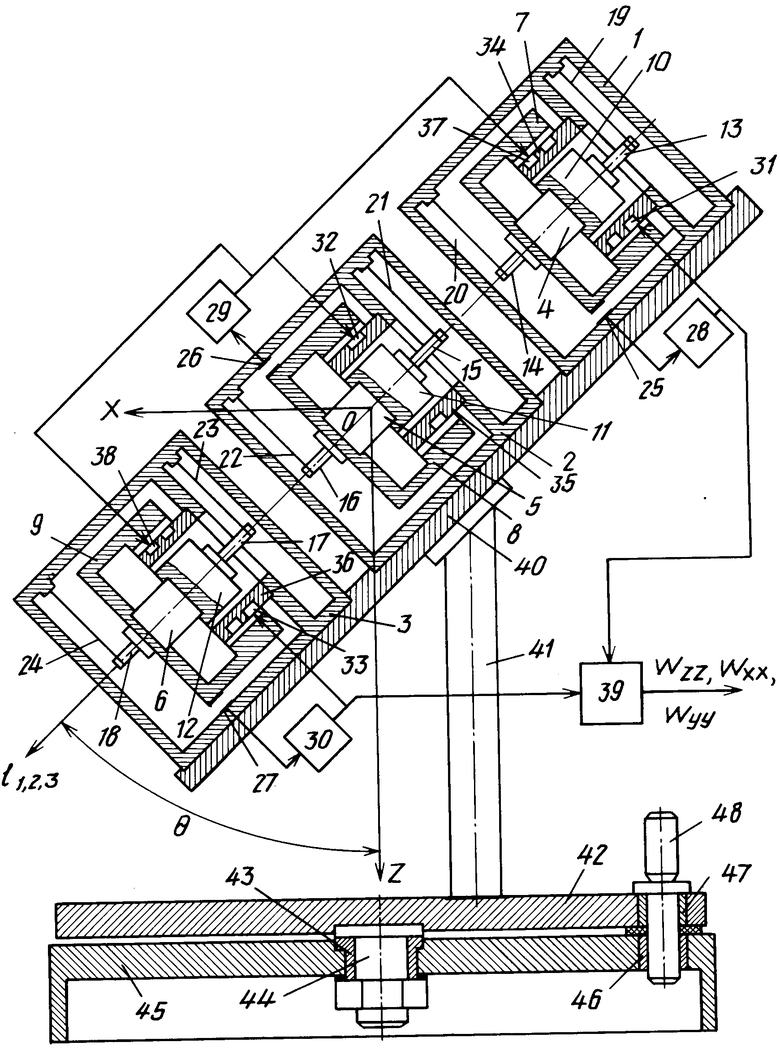
На чертеже представлена принципиальная схема предлагаемого гравитационного трехкомпонентного градиентометра.
Градиентометр содержит три акселерометра, которые состоят из корпусов 1, 2, 3, чувствительных систем в виде масс, например, из постоянных магнитов 4, 5, 6, магнитопроводов 7, 8, 9, полюсных наконечников 10, 11, 12, опор 13, 14, 15, 16, 17, 18, подвешенных в корпусах 1, 2, 3, например, с помощью лент 19, 20; 21, 22; 23, 24 и снабженных электрическими пружинами в виде датчиков 25, 26, 27 перемещений, усилительных блоков 28, 29, 30 и датчиков сил в виде постоянных магнитов 4, 5, 6, магнитопроводов 7, 8, 9, полюсных наконечников 10, 11, 12 и обмоток 31, 32, 33, установленных в каркасах 34, 35, 36, жестко связанных с корпусами 1, 2, 3. Вход датчика силы (обмотка 32) одного акселерометра (который в корпусе 2) соединен с входом дополнительных датчиков сил двух других акселерометров (которые в корпусах 1, 3), т.е. с дополнительными обмотками 37, 38. Входы датчиков силы, т.е. обмотки 31, 33, электрических пружин двух акселерометров (в корпусах 1, 3) соединены с входом регистрирующего устройствам в виде счетно-решающего блока 39. Корпуса 1, 2, 3 акселерометров жестко установлены на основании 40, скрепленном со стойкой 41, жестко связанной с поворотной плитой 42. Поворотная плита с помощью цапфы 43 и втулки 44 установлена на платформе 45, в которой предусмотрены три равнорасположенные по окружности втулки 46 (на чертеже две втулки из трех не показаны). В поворотной плите 42 предусмотрены втулка 47 и фиксатор 48.
Поворотная плита 42 поворотом вокруг вертикальной оси цапфы 43 фиксируется в трех разных угловых положениях фиксатором 48. Корпуса 1, 2, 3 акселерометров могут герметизироваться и могут вакуумироваться.
В рабочем положении градиентометра ось поворота плиты 42 устанавливается в вертикальное положение, а ось чувствительности акселерометров занимает положение под углом θ к направлению вертикали. В градиентометре может быть предусмотрено термостатирование.
В рассматриваемом примере принципиальной схемы градиентометра в качестве масс акселерометров используются постоянные магниты с магнитопроводами и полюсными наконечниками, а можно наоборот магнитопроводы с магнитами и полюсными наконечниками закрепить на корпусах, а в качестве масс подвесить каркасы 34, 35, 36 с обмотками 31, 32, 33, 37, 38. Массы акселерометров могут быть подвешены и как в прототипе, где подвеска состоит из механических пружин.
Для определения Wzz, Wxx, Wyy измерение производится в трех азимутах. Азимут устанавливается начальной выставкой платформы 45 и поворотом плиты 42.
Предлагаемый измеритель работает следующим образом.
Определение измеряемых величин производится алгоритмическим методом в несколько тактов измерения. Первый такт. Ось х направлена на север, ось у на восток, ось z перпендикулярна ху, ось чувствительности акселерометров направлена под углом θк оси z в плоскости меридиана. Полагают, что первые и вторые производные потенциала силы тяжести постоянны в объеме, занимаемом измерителем. В результате имеют m1gl11=Fgc1; (1) m2(gl11-W )=n1Fgc1+Fgc2; (2) m3(gl11+W
)=n1Fgc1+Fgc2; (2) m3(gl11+W )= n2Fgc1+Fgc3, (3) где m1, m2, m3 чувствительные массы акселерометров (в корпусах 1, 2, 3),
)= n2Fgc1+Fgc3, (3) где m1, m2, m3 чувствительные массы акселерометров (в корпусах 1, 2, 3),
g =
=  где W потенциал силы тяжести;
где W потенциал силы тяжести;
l1 направление оси чувствительности акселерометров в первом такте измерения;
Fgc1 сила, прикладываемая к массе акселерометра в корпусе 2 датчиком силы электрической пружины этого акселерометра;
W =
= 
L1 расстояние между центрами чувствительных масс акселерометров в корпусах 2 и 1;
L2 расстояние между центрами чувствительных масс акселерометров в корпусах 2 и 3;
n1 коэффициент пропорциональности (передачи) между силой дополнительного датчика силы (обмотка 37) и силой, развиваемой датчиком силы электрической пружины акселерометра в корпусе 2 (обмотка 32);
n2 коэффициент пропорциональности (передачи) между силой дополнительного датчика силы (обмотка 38) и силой, развиваемой датчиком силы электрической пружины акселерометра в корпусе 2 (обмотка 32);
Fgc2, Fgc3 силы датчиков сил электрических пружин акселерометров в корпусах 1, 3 соответственно.
Из выражений (1), (2), (3) получают
Fgc2 A11gl1-A12W ;
;
Fgc3 A21gl11+A22W , где A11 m2 n1m1;
, где A11 m2 n1m1;
A21 m3 n2m1;
A12 m2L1;
A22 m3L2.
Получают два соотношения, связывающие проекции ускорения силы тяжести и проекцию градиента силы тяжести на направление l1, откуда в счетно-решающем блоке и выделяют W , т. е. в отличие от прототипа определяют W
, т. е. в отличие от прототипа определяют W от gl11, и не требуется ужесточать требования к конструктивным элементам прибора для устранения влияния gl11 (что требуется в прототипе).
от gl11, и не требуется ужесточать требования к конструктивным элементам прибора для устранения влияния gl11 (что требуется в прототипе).
Таким образом, в первом такте измерения определяют W .
.
Выполняя операции, аналогичные первому такту, во втором и третьем тактах, поворачивая систему в азимуты α= 120о и α=240о, находят W и W
и W , где W
, где W и W
и W градиенты ускорения силы тяжести на направление l2 и l3 при втором и третьем тактах измерения.
градиенты ускорения силы тяжести на направление l2 и l3 при втором и третьем тактах измерения.
Далее геометрически находят Wzz=(W +W
+W +W
+W )cosθ Wxx= [W
)cosθ Wxx= [W -(W
-(W +W
+W ) sin30o]sinθ
) sin30o]sinθ
Wyy=(W -W
-W )cos30osinθ
)cos30osinθ
θ=arccos 1/
Вычисление производится в счетно-решающем блоке.
Поскольку в предлагаемой схеме градиентометра происходит разделение сигналов ускорения и градиентов силы тяжести, то не требуется уменьшения влияния силы тяжести на выходной сигнал до величин, соответствующих допустимым абсолютным погрешностям измерения градиента, и в результате конструктивные требования к предлагаемому прибору аналогичны требованиям к гравиметрическим приборам, применяемых в эксплуатации.
Таким образом, в сравнении с прототипом, которые может измерять компоненты градиента только в специальных лабораторных условиях, предлагаемый градиентометр может проводить измерения в условиях эксплуатации существующих гравиметрических измерителей.
Предлагаемый градиентометр может работать на подвижном основании при соответствующем согласовании его динамических характеристик и параметров движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1990 |
|
RU2033632C1 |
| Прецизионный вертикальный градиентометр | 1989 |
|
SU1836645A3 |
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО ГРАДИЕНТА И УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1990 |
|
RU2037163C1 |
| Гравитационный вертикальный градиентометр | 1991 |
|
SU1838804A3 |
| Измеритель ускорения и вертикального градиента силы тяжести | 1991 |
|
SU1827659A1 |
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2004 |
|
RU2290674C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1972 |
|
SU344357A1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
Использование: в измерительной технике, в частности при измерении вертикального градиента силы тяжести W27 и двух составляющих градиента кривизны уровенной поверхности потенциала силы тяжести. Сущность изобретения: градиентометр снабжен третьим акселерометром в корпусе, вход датчика силы электрической пружины которого соединен с входами дополнительно предусмотренных датчиков силы двух других акселерометров, а входы датчиков силы электрических пружин этих двух акселерометров соединены с входом счетно-решающего устройства. 1 ил.
ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР, содержащий регистрирующее устройство и два акселерометра, заключенные в корпус, при этом каждый акселерометр включает чувствительную систему с упруго закрепленной инертной массой, а оси чувствительности акселерометров направлены вдоль одной оси и образуют угол с направлением вертикали, причем корпус установлен с возможностью поворота относительно вертикали, отличающийся тем, что градиентометр дополнительно содержит третий акселерометр, при этом каждый акселерометр размещен в отдельном корпусе, каждый из которых жестко закреплен на основании с возможностью перемещения по направлению осей чувствительности акселерометров, инертная масса чувствительной системы каждого акселерометра выполнена в виде постоянного магнита, магнитопровода и полюсного наконечника, при этом инертные массы чувствительной системы каждого акселерометра снабжены датчиком перемещения, усилителем и датчиком силы, а также инертные массы чувствительной системы первого и третьего акселерометров снабжены дополнительными датчиками силы, при этом датчик силы инертной массы второго акселерометра соединен с дополнительными датчиками силы инертных масс первого и третьего акселерометров, датчики силы которых соединены с входом регистрирующего устройства, выполненного в виде счетно-решающего блока.
| Chan H.A | |||
| and Paik H.J | |||
| Surepconducting | |||
| gravity gradiometer Phisical Review D, 1987, v.35, N 12. |
