Изобретение относится к приборам и элементам автоматики и контрольно-измерительной техники и может быть использовано в системах терморегулирования (СТР) космических летательных аппаратов (КЛА).
Цель изобретения - повышение точности и надежности регулятора.
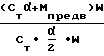
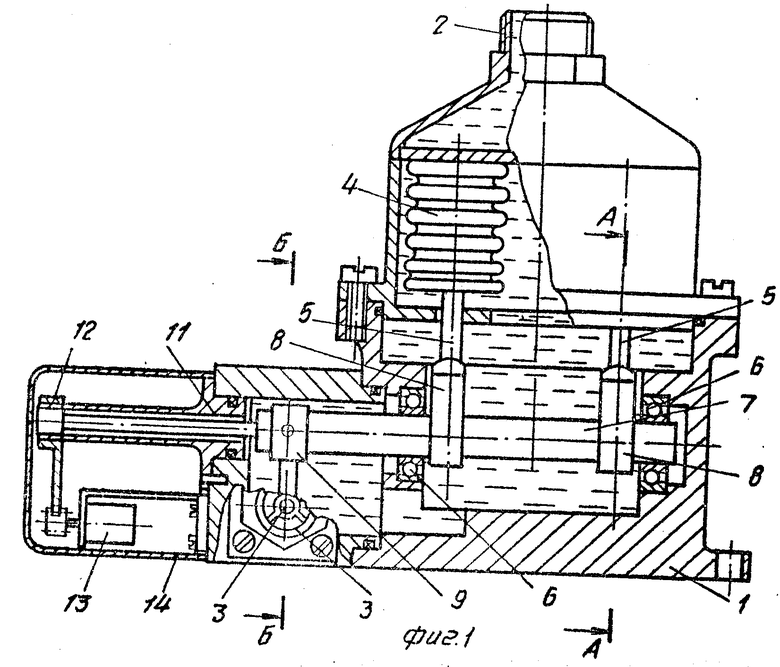
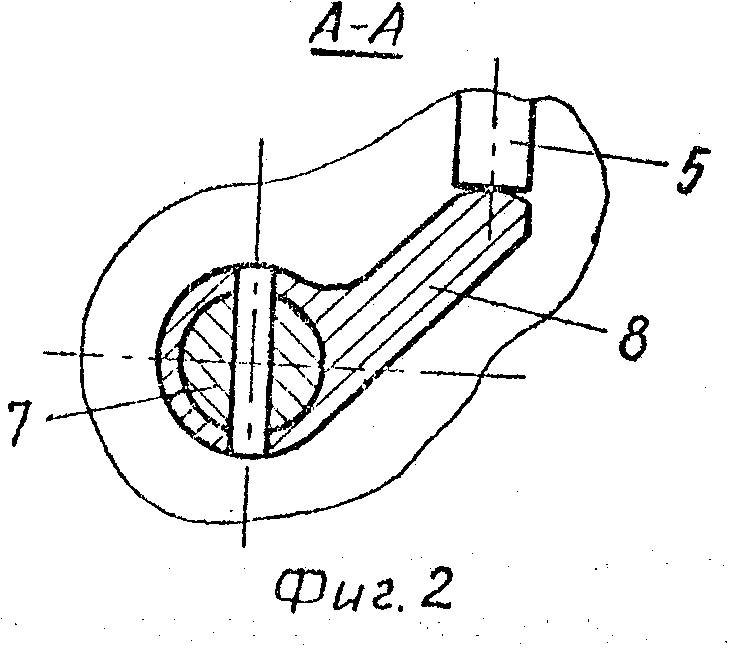
На фиг. 1 приведена конструкция прототипа, продольный разрез, на фиг. 2 и 3 - то же, разрезы по А-А и Б-Б.
Регулятор содержит корпус 1 с входным 2 и выходными 3 штуцерами. В корпусе установлен тепловой привод 4 с толкателями 5. В корпусе на подшипниках 6 размещен вал 7, на котором размещены два рычага 8. На валу также установлен рычаг 9, связанный с плунжером 10. В корпусе установлена торсионная пружина 11, один конец которой установлен неподвижно относительно корпуса, а второй конец приварен к валу 7. На торсионной пружине установлен зубчатый сектор 12 ,связанный с потенциометром 13, который закрыт крышкой 14. Регулятор работает следующим образом: при поступлении теплоносителя во входной штуцер 2 он протекает внутри корпуса 1 к выходным штуцерам 3. При этом соотношение потоков через левый (на фиг. 3) и правый выходные штуцера 3 определяется положением плунжера 10, что, в свою очередь, определяется угловым положением вала 7. При повышении температуры внутри корпуса 1 толкатели 5 теплового привода 4 опустятся и через рычаги 8 повернут вал 7 по часовой стрелке (на фиг. 2 и 3) до тех пор, пока момент упругости закрученной торсионной пружины 11 не сравняется с моментом, воздействующим на вал 7 от толкателей 5. Таким образом, плунжер 10 сдвинется влево (на фиг. 3), уменьшив расход теплоносителя через левый штуцер 3, связанный с нагревателем и увеличив расход через правый штуцер, присоединенный к охладителю СТР. Это изменение соотношения расходов приведет к тому, что после прохождения нагревающего и охлаждающего контуров на вход 2 регулятора будет поступать теплоноситель с пониженной температурой, что компенсирует первоначальное повышение температуры. В случае же понижения температуры внутри регулятора толкателя 5 поднимаются и вал 7 поворачивается против часовой стрелки за счет момента упругости торсионной пружины 11.
Известен способ сборки регулятора температуры прямого действия, заключающийся в установке в корпусе 1 регулятора вала 7 с закрепленными на нем рычагами 8 и рычагом 9. Затем в корпус регулятора устанавливается торсионная пружина 11 и жестко соединяется одним своим концом с валом 7. После этого производят установку рычага 9 в крайнее положение до упора плунжера 10 на штуцере 3. Торсионную пружину 11 закручивают на угол 5о в сторону прижатия рычагов 8 к толкателям 5. В этом положении торсионная пружина 11 жестко закрепляется свободным концом в корпусе 1 посредством выполнения штифтового соединения, после чего в корпус регулятора устанавливаются тепловой привод 4 с толкателями 5.
Недостатками конструкции и способа сборки прототипа является нестабильность характеристик регулятора в процессе его длительной эксплуатации, что объясняется значительными напряжениями в торсионной пружине, которые являются следствием предварительного закручивания торсионной пружины на значительной угол. Прототип конструировался для использования его в одноразовых КЛА и вопрос длительной работоспособности регулятора на стоял перед конструкторами. При разработке новых перспективных КЛА многоразового использования остро стоит вопрос о повышении ресурса работоспособности агрегатов космической техники. При этом работоспособность регулятора определяется характеристиками торсионной пружины, которые в прототипе будут нестабильными при многоразовом использовании.
Целью изобретения является повышение точности и надежности регулятора температуры прямого действия.
Для достижения этой цели в известный регулятор температуры, содержащий корпус, установленные в нем тепловой привод с толкателями и вал, а также регулирующий орган и рычаги, установленные на валу и связанные с толкателями теплового привода и плунжером регулирующего органа, герметичную торсионную пружину, концы которой заделаны в корпус и вал, а также датчик положения регулирующего органа, введена вспомогательная пружина кручения, установленная между корпусом и валом, один конец которой закреплен на валу, а другой - в корпусе. Для достижения этой цели в способе сборки регулятора, включающем установку в корпусе вала с рычагами и регулирующего органа, установку и фиксацию в корпусе герметичной торсионной пружины, а также установку теплового привода, осуществляют установку на валу вспомогательной пружины с фиксацией на валу одного из ее концов, после чего производят установку торсионной пружины и выставку регулирующего в среднее положение, а фиксацию торсионной пружины в корпусе производят при среднем положении регулирующего органа, затем производят закручивание свободного конца вспомогательной пружины моментом М до достижения регулирующим органом крайнего положения и фиксируют свободный конец пружины на корпусе, при этом величина момента определяется неравенством
Cт·  ≅ M ≅ Mпр-Cт·
≅ M ≅ Mпр-Cт·  - C·α где Мпр - момент, создаваемый на валу толкателями теплового привода;
- C·α где Мпр - момент, создаваемый на валу толкателями теплового привода;
α - полный угол поворота вала от упора до упора.
Ст, С - жесткости на кручение соответственно торсионной и вспомогательной пружины, после чего устанавливают тепловой привод.
Указанная совокупность признаков устройства ранее авторам не встречалась. Известно применение пружин кручения, но в данном случае совместное применение торсионной пружины и вспомогательной пружины позволяет более чем вдвое уменьшить напряжение в торсионной пружине при ее функционировании в состав регулятора, таким образом вспомогательная пружина в данном случае позволяет повысить надежность и стабильность характеристик торсионной пружины, увеличивая коэффициент запаса по текучести торсионной пружины, а следовательно позволяет значительно повысить работоспособность, надежность и стабильность характеристик регулятора температуры, так как его параметры полностью зависят от характеристик торсионной пружины. Фиксацию торсионной пружины производят при среднем положении регулирующего органа производят закручивание свободного конца пружины моментом М. причем:
Cт·  ≅ M ≅ Mпр-Cт·
≅ M ≅ Mпр-Cт·  - C·α
- C·α
по отдельности тоже не выявлены авторами в составе известных устройств. Указанная совокупность существенных признаков позволяет получить положительный эффект, а именно как было указано выше значительно повысить точность и надежность, за счет повышения стабильности характеристик и ресурса работы регулятора температуры прямого действия. При этом использование других способов сборки к вышеуказанному эффекту не приводит, что подтверждает тот факт, что заявленные регулятор температуры прямого действия и способ его сборки представляют группу изобретений, связанных единым изобретательским замыслом.
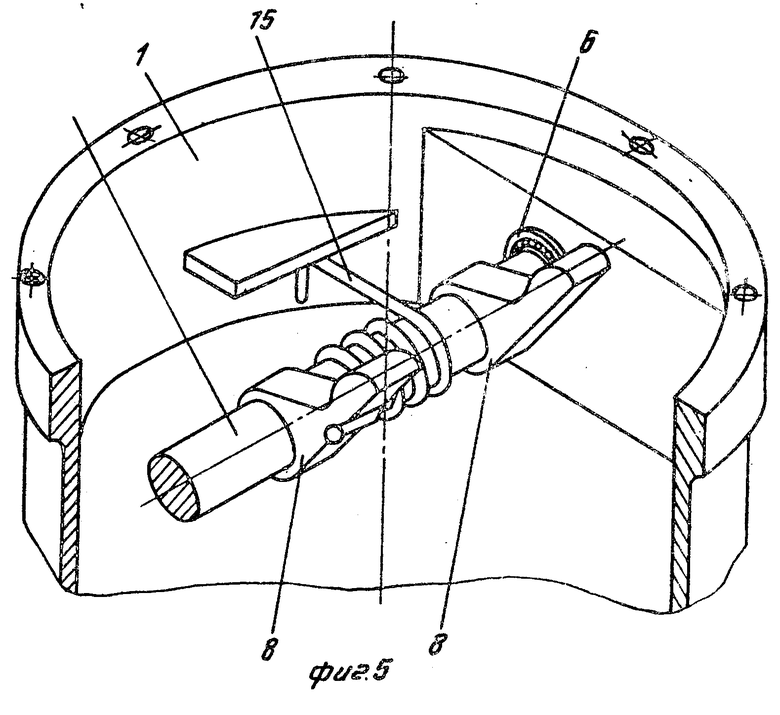
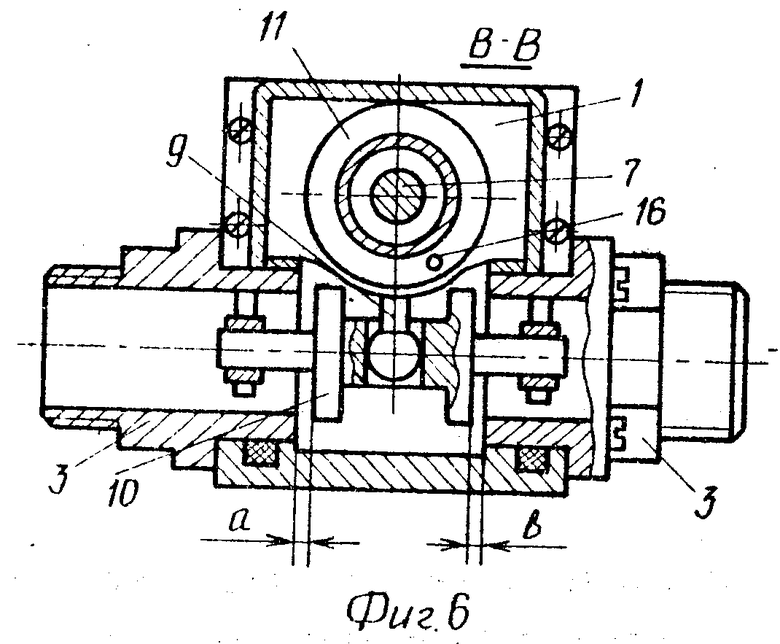
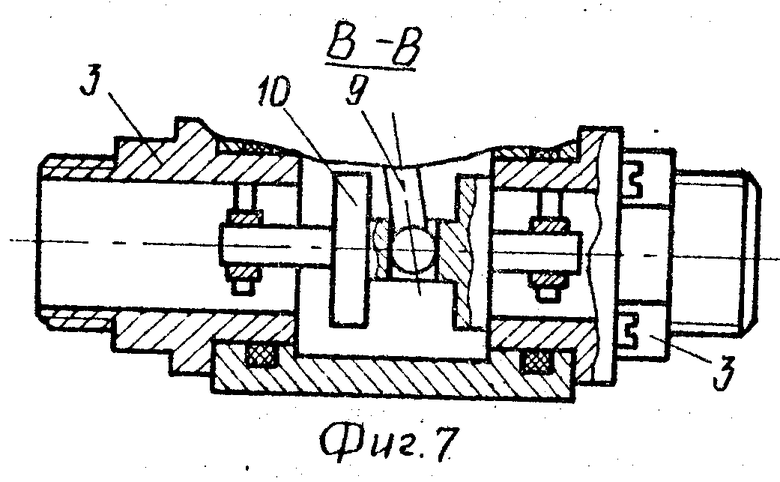
На фиг. 4 приведен пример конкретного выполнения регулятора температуры прямого действия, продольный разрез; на фиг. 5 - взаимное расположение вала, рычагов и вспомогательной спиральной пружины в корпусе, при неустановленном тепловом приводе с толкателям, изображенное в изометрии; на фиг. 6 и 7 - разрез по В-В, отображающие стадии сборки регулятора. Разрезы по А-А и Б-Б полностью идентичны с разрезами А-А и Б-Б прототипа, изображенными на фиг. 2 и 3.
Регулятор содержит корпус 1 с входным 2 и выходными штуцерами 3 и размещенные в нем тепловой привод 4 с толкателями 5. В корпусе на подшипниках 6 размещен вал 7. на котором установлены два рычага 8 и рычаг 9, связанный с плунжером 10 регулирующего органа. В корпусе установлена торсионная пружина 11, один конец которой установлен неподвижно относительно корпуса, а второй приварен к валу 7. На торсионной пружине установлен зубчатый сектор 12, связанный с датчиком 13 положения регулирующего органа, который закрыт крышкой 14. В корпусе на валу 7 установлена вспомогательная спиральная пружина 15 кручения, причем один ее конец закреплен на рычаге 8, а другой конец пружины 15 упирается в выступ на корпусе 1. Торсионная пружина 11 застопорена от проворота в месте заделки в корпус штифтом 16 . Сборка регулятора производится следующим образом: в корпус 1 на подшипниках 6 устанавливают вал 7, при этом на вал насаживают рычаг 9, рычаг 8 (левый на фиг. 4), вспомогательную пружину 15 и рычаг 8 (правый на фиг. 4). Рычаг 9 жестко закрепляется штифтом на валу 7. Затем на вал устанавливают торсионную пружину 11 и ее конец приваривают к концу вала 7, другой же ее конец свободно проворачивается в месте заделки его в корпус 1. Затем в корпус устанавливают выходные штуцера 3 и плунжер 10, соединяя его с рычагом 9. После этого, проворачивая в месте заделки в корпусе 1 вал с торсионной пружиной, устанавливают плунжер 10 в среднее положение, контролируя зазоры "а" и "в" (на фиг. 6), добиваются условия, при котором "а"="в". при этом положении плунжера торсионную пружину 11 жестко закрепляют в корпусе 1, устанавливая штифт 16. Затем на валу 7 жестко закрепляются рычаги 8 в соответствии с положением рычага 9, посредством замера расстояния от фланца корпуса до рычагов 8.
После чего устанавливают плунжер 10 в крайнее положение, закрепив один конец пружины 15 на рычаге 8, жестко соединенном с валом, а второй конец закручивают моментом М и закрепляют на корпусе 1 (фиг. 5).
Величина момента М определяется неравенством
Cт·  ≅ M ≅ Mпр-Cт·
≅ M ≅ Mпр-Cт·  - C·α (1) где Мпр - момент, создаваемый на валу толкателями теплового привода;
- C·α (1) где Мпр - момент, создаваемый на валу толкателями теплового привода;
α - полный угол поворота вала от упора до упора;
Ст, С - жесткости на кручение соответственно торсионной пружины и вспомогательной пружины.
После этого устанавливают зубчатый сектор 12, вводят его в зацепление с датчиком положения 13 регулирующего органа и устанавливают крышку 14. Затем в корпус 1 ставится тепловой привод 4. Величина момента М определяется из следующих соображений:
В исходном положении (при полностью утопленных толкателях теплового привода) плунжер 10 должен полностью перекрывать один из штуцеров 3 (правый на фиг. 7). Это будет выполняться в случае, если момент М будет больше или равен моменту упругости торсионной пружины, противодействующему моменту М и равного Ст (так как торсионная пружина, исходя из заданной установки повернется на угол
(так как торсионная пружина, исходя из заданной установки повернется на угол  ).
).
Таким образом М≥Ст ˙  (2)
(2)
В положении, соответствующем полностью выдвинутым толкателем теплового привода, плунжер 10 должен полностью перекрываться другой штуцер 3 (левый на фиг. 7). Это возможно, если момент, развиваемый тепловым приводом и приведенный к валу моменту Мпр будет превосходить или равняться моментам сопротивления торсионной пружины Мт.п. и дополнительной спиральной пружины Мс.п.
Мпр≥Мт.п.+Мс.п. (3)
Мт.п.= Ст  (т. к. угол отклонения торсионной пружины и в этом случае будет равен
(т. к. угол отклонения торсионной пружины и в этом случае будет равен  ).
).
Mсп.= Cα+M (4)
(т. к. первоначальный момент сопротивления М за счет поворота конца дополнительной пружины, закрепленного на валу, на угол α увеличится на С ˙α ).
Из (2) и (4) получим вышеприведенное неравенство (1).
Регулятор работает следующим образом: при поступлении теплоносителя во входной штуцер 2 он протекает внутри корпуса 1 к выходным штуцерам 3. При этом соотношение потоков через левый (на фиг. 6) и правый (на фиг. 6) выходные штуцера 3 определяется положением плунжера 10, что в свою очередь определяется угловым положением вала 7. При повышении температуры внутри корпуса 1 толкателя 5 теплового привода 4 опустятся и, через рычаги 8, повернут вал 7 по часовой стрелке до тех пор, пока моменты упругости торсионной пружины 11 и пружины 15 не сравняются с моментом, воздействующим на вал 7 от толкателей 5, что приведет к перераспределению потоков через штуцера 3, точно также, как описано в разделе "Описание прототипа". Однако в прототипе максимальное напряжение в торсионной пружине при работе в крайнем левом (на фиг. 3) положении плунжера 10 (то есть при полностью утопленных толкателях 5) будет равно
τmax1=  (5) где Мпредв - момент предварительной закрутки торсионной пружины
(5) где Мпредв - момент предварительной закрутки торсионной пружины
W - момент сопротивления кручению.
В заявленном же устройстве величина максимальных напряжений в торсионной пружине будет равна в любом из крайних положений плунжера 10:
τmax2= ±  (6)
(6)
так как, благодаря заявленному способу сборки угол закручивания торсионной пружины находится в пределах от - -  до+ +
до+ +  Знаки "+" и "-" показывают, что напряжения будут иметь разные знаки в различных крайних положениях плунжера. Таким образом мы разгрузили наиболее ответственный узел, определяющий характеристики регулятора.
Знаки "+" и "-" показывают, что напряжения будут иметь разные знаки в различных крайних положениях плунжера. Таким образом мы разгрузили наиболее ответственный узел, определяющий характеристики регулятора.
В результате использования изобретения существенно снижаются напряжения в торсионной пружине: =
=  = 2
= 2 1 +
1 +  ≥ 2
≥ 2
Таким образом, уровень напряжений в торсионной пружине снижен более чем в 2 раза (равно в 2 раза в случае Мпредв=0, то есть без предварительного поджатия торсионной пружины). Величина же напряжений в дополнительной пружине может быть выбрана достаточно низкой, так как она определяется числом витков дополнительной спиральной пружины 15 и диаметром, и может широко варьироваться за счет наличия значительного объема для его размещения между рычагами 8, в то время как увеличение момента сопротивления кручению торсионной пружины (за счет увеличения диаметра или толщины торсионной трубки) приведет к резкому возрастанию жесткости торсионной пружины, уменьшению хода плунжера, и, как следствие, к неработоспособности регулятора температуры. В результате увеличивается запас по текучести торсионной пружины, повышается стабильность размеров торсионной пружины и ее характеристик, что позволяет существенно повысить ресурс работы регулятора. Подобные преимущества позволяют рекомендовать изобретение к использованию в космических летательных аппаратах многоразового использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ | 1988 |
|
SU1831149A2 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1992 |
|
RU2029934C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПОДАЧЕЙ ВОДЫ В РАБОЧЕЕ ТЕЛО | 1992 |
|
RU2032106C1 |
| Насос высокого давления для подачи топлива в дизельный двигатель | 1985 |
|
SU1309920A3 |
| УСТРОЙСТВО К КРИВОШИПНОМУ МЕХАНИЗМУ ДВИГАТЕЛЯ ДЛЯ ТОЧНОГО РЕГУЛИРОВАНИЯ ЕГО СТЕПЕНИ СЖАТИЯ | 1997 |
|
RU2133846C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ С РЕДУКТОРОМ СКОЛЬЖЕНИЯ | 2018 |
|
RU2715762C1 |
| СИЛОВАЯ УСТАНОВКА | 1989 |
|
RU2029880C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1991 |
|
RU2024910C1 |
| ПРИВОД ЗАКРЕПЛЕННОГО НА РАМЕ ТЕЛЕЖКИ ПОДВАГОННОГО ГЕНЕРАТОРА | 1995 |
|
RU2104193C1 |
| ОТСЕЧНОЙ ЗАПОРНО-РЕГУЛИРУЮЩИЙ КЛАПАН | 1998 |
|
RU2135873C1 |
Изобретение относится к автоматике и может использоваться в системах терморегулирования космических летательных аппаратов. Цель изобретения - повышение точности и надежности регулятора температуры прямого действия и способа его сборки. Регулятор содержит корпус 1 с входным 2 и выходными 3 штуцерами регулирующий орган, плунжер 10 которого связан с валом 7, соединенным через торсионную пружину 11 с датчиком 13 положения регулирующего органа, а через рычаги 8 и толкатели 5 - с тепловым приводом 4. На валу 7 установлена вспомагательная пружина 15, один конец которой закреплен на валу, а второй - в корпусе. Способ сборки регулятора включает установку в корпусе вала 7 с рычагами 8, между которыми устанавливают пружину 15, первый конец которой закрепляют на валу, затем устанавливают торсионную пружину 11, первый конец которой скрепляют с валом 7, устанавливают в среднее положение регулирующий орган, фиксируют в корпусе второй конец торсионной пружины, закручивают вспомагательную с установкой регулирующего органа в крайнее положение и фиксируют в корпусе второй конец пружины 15, после чего устанавливают в корпусе тепловой привод с толкателями. 2 с.п. ф-лы, 7 ил.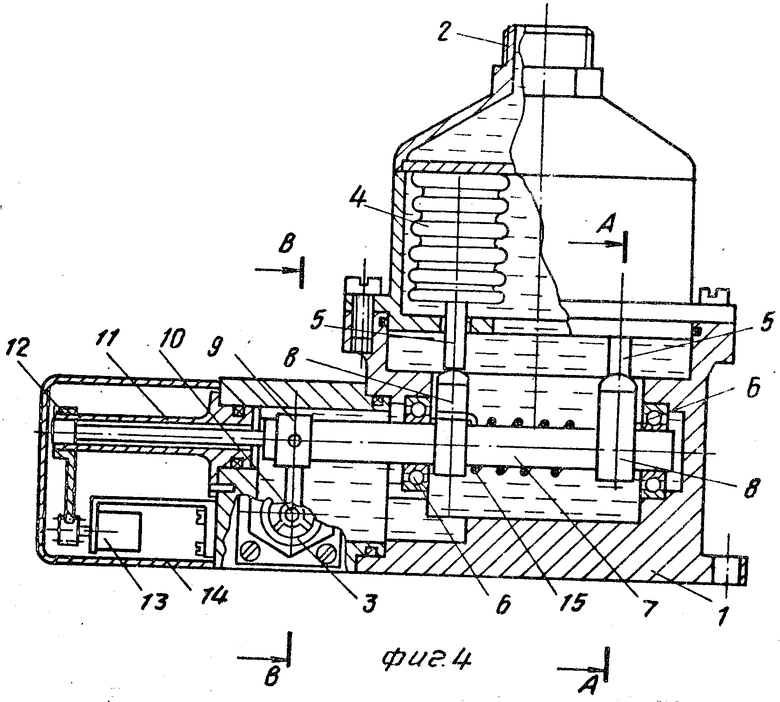
РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ И СПОСОБ ЕГО СБОРКИ.
| Регулятор температуры прямого действия и технические условия его сборки | |||
| Чертеж | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ПЛАНЕР - ОРНИТОПТЕР | 1920 |
|
SU1205A1 |
