Изобретение относится к измерительной технике и к способам калибровки датчика ускорений.
Целью изобретения является повышение точности калибровки и точности измерения датчика.
Указанная цель - повышение точности калибровки - достигается тем, что в способе калибровки датчика ускорения изменяют плотность среды, окружающей инерционный элемент, и при одинаковом ускорении измеряют отклонение инерционного элемента при различных плотностях среды, а на основании зависимости отклонения инерционного элемента от плотности среды
определ я ют абсол ютное ускорен ие с учетом известной константы силы, системы, состоящей из инерционного и упругого элементов.
Указанная цель, повышение точности измерения, достигается тем, что в датчике ускорения инерционный элемент выполнен электропроводным, чувствительный элемент выполнен в виде направленного на инерционный элемент наконечника, снабженного устройством его перемещения для поддержания постоянного расстояния между инерционным элементом и наконечником, при этом последний соединен с измерительной цепью, включающей амперсоto
00
ел
N
XJ
со
метр, подключенный к источнику тока, плюсовой полюс которого через упругий элемент соединен с инерционным элементом, регулируемый источник напряжения, соединенный своими выходами с электродами ус- тройства перемещения наконечника, а входом - с выходом регулятора, подключенного к амперметру, причем корпус выполнен герметичным, а его полость заполнена газом или жидкостью. Кроме того, в датчик введен второй аналогичный чувствительный элемент, расположенный по другую сторону от инерционного элемента, и подключенный к введенной второй измерительной цепи, аналогичной первой,
.В датчике ускорений согласно изобретению изменяют не массу инерционного- элемента, а плотность среды, окружающей инерционный элемент. Тем самым изменяется подъемное усилие, которое вызывает инерционный элемент при определенном ускорении. Это подъемное усилие является зависимым от объема среды, вытесненного инерционным элементом, и от ее плотности. Чем большим является ускорение, тем боль- шей является разность подъемных усилий между обоими состояниями с различными плотностями среды. Ускорение b при способе согласно изобретению может определяться в соответствии со следующим уравнением:
b -k Дх/v Ар,
где k - компонента усилия упругой системы; Ах - разность между отклонениями инерционного элемента при обоих измерениях; v - объем инерционного элемента, Др - разность плотностей среды при обоих измерениях. Таким образом, является возможным калибровать датчик ускорений за счет измерения отклонения при одном и том же уско- рении м при различных плотностях среды для того, чтобы при известной постоянной усилия k упругой системы определять начало системы координат, через которое проходит прямая, характеризующая зависимость между b и х.
Изменение плотности среды, окружающей инерционный элемент, может осуществляться за счет того, что изменяют давление среды в камере, окружающей инерционный элемент, пли за счет того, что в эту камеру вводят различные среды, например, газы. Изменение плотности происходит с постоянными времени в диапазоне секунд, так чтобы датчик ускорений является особенно пригодным для определения низкочастотных или статических ускорений.
Датчик ускорений можно использовать для измерения ускорений на земле, где универсальным является ускорения свободного падения g или же для измерений ускорений в невесомом пространст ве, например, в космическом пространстве. В любом случае возможна высокочастотная калибровка, так что с высокой точностью может определяться абсолютная величина ускорения.
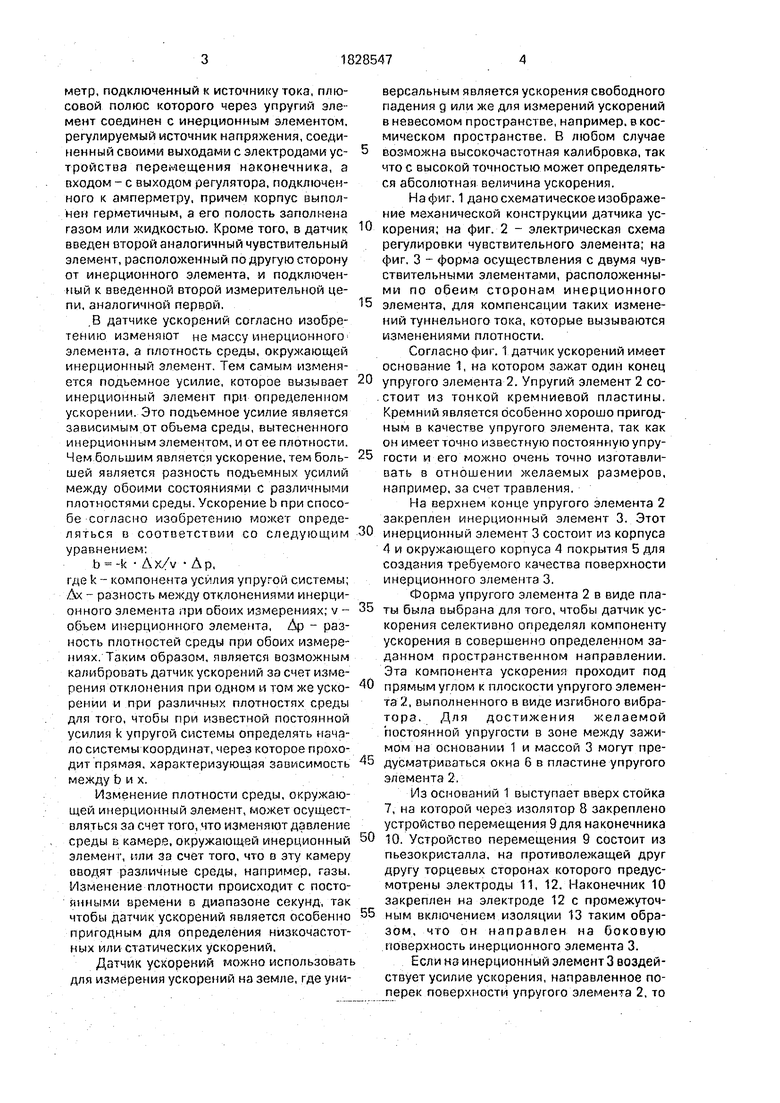
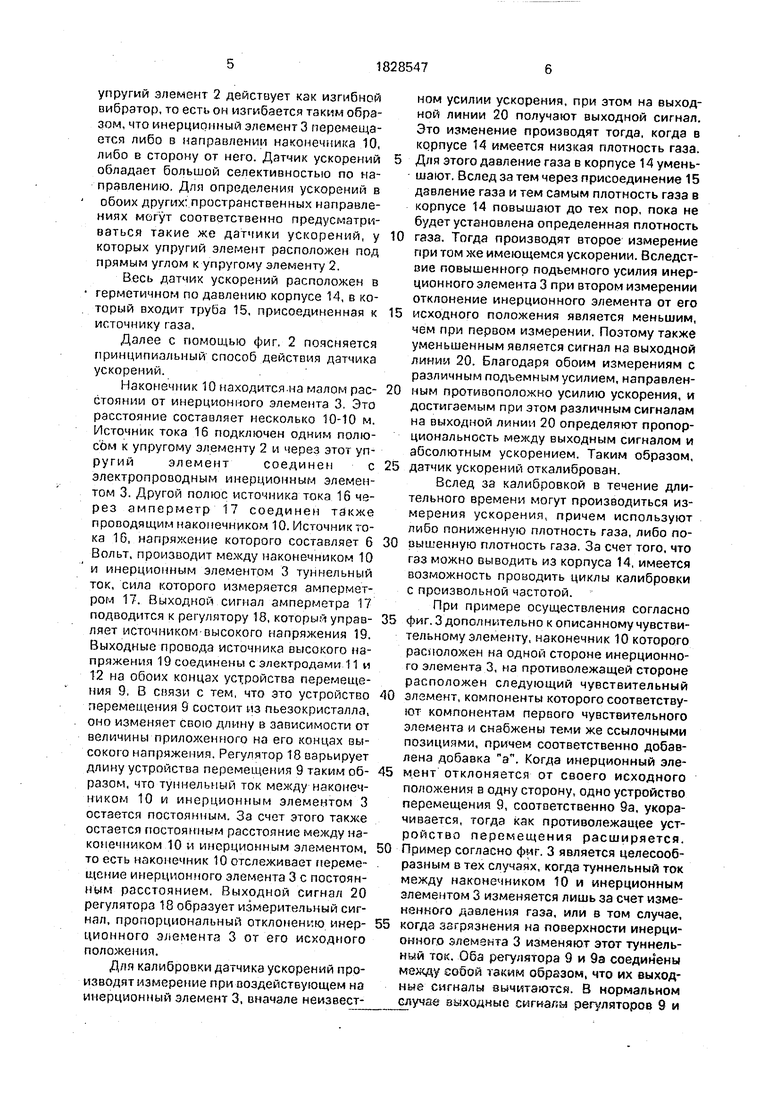
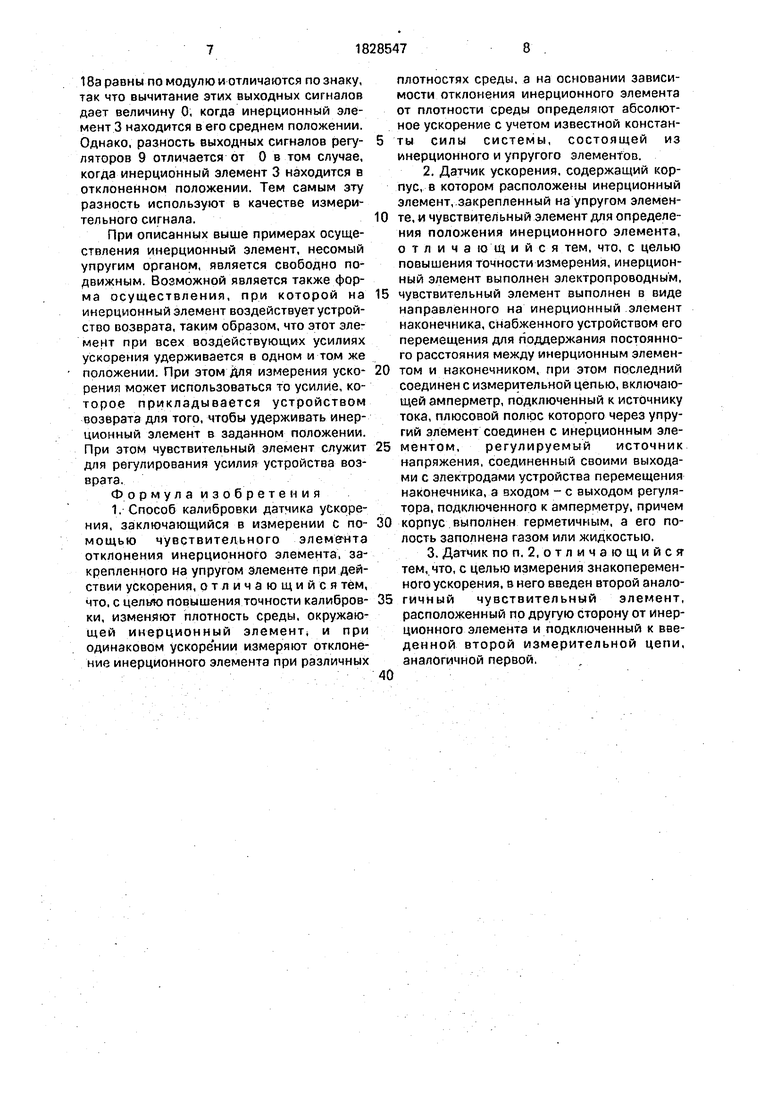
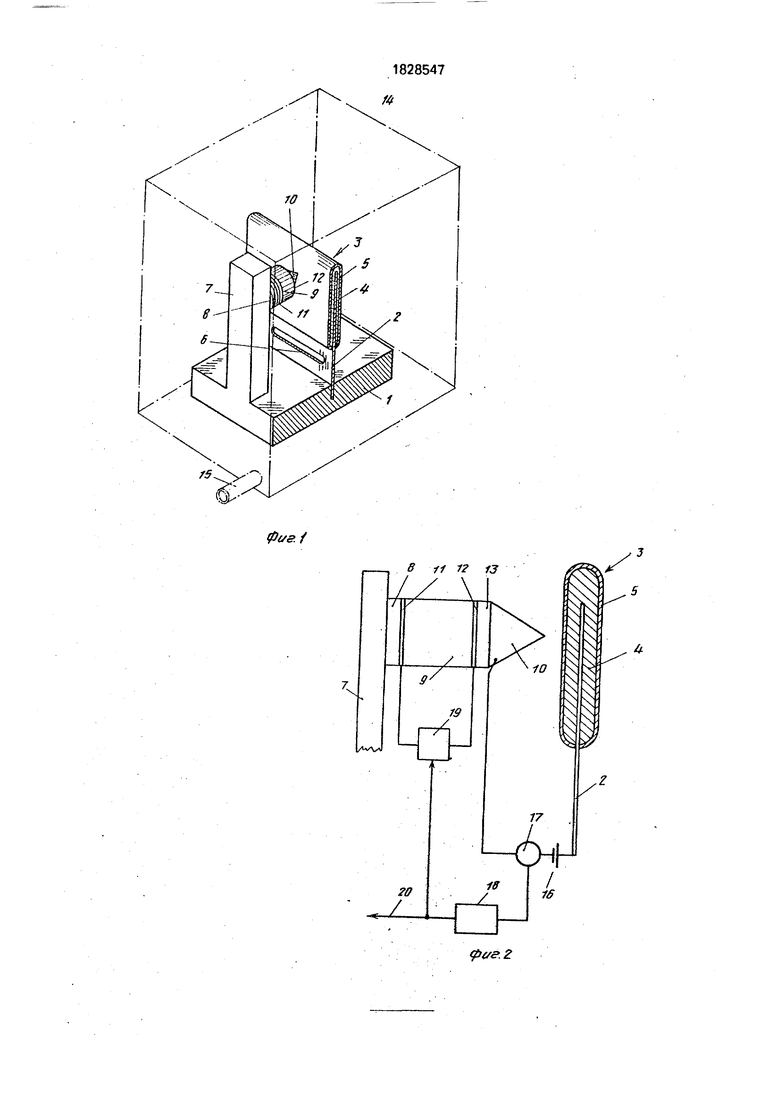
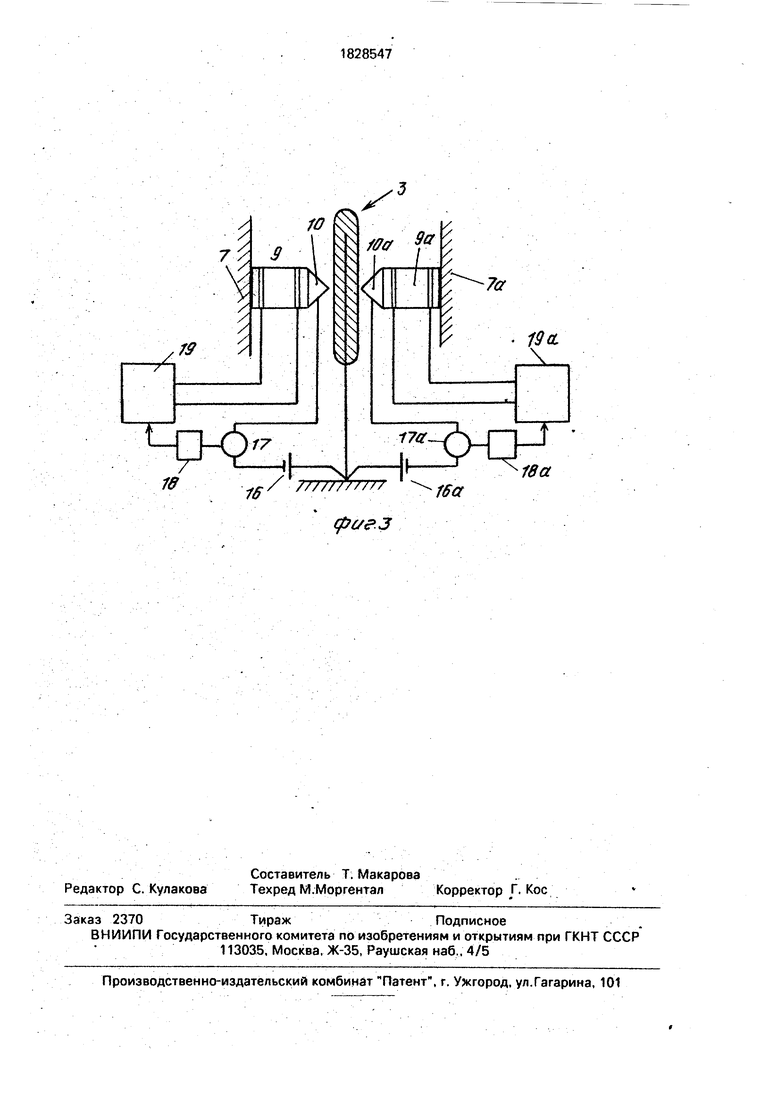
На фиг. 1 дано схематическое изображение механической конструкции датчика ускорения; на фиг. 2 - электрическая схема регулировки чувствительного элемента; на фиг, 3 - форма осуществления с двумя чувствительными элементами, расположенными по обеим сторонам инерционного элемента, для компенсации таких изменений туннельного тока, которые вызываются изменениями плотности.
Согласно фиг. 1 датчик ускорений имеет основание 1, на котором зажат один конец упругого элемента 2. Упругий элемент 2 состоит из тонкой кремниевой пластины. Кремний является особенно хорошо пригодным в качестве упругого элемента, так как он имеет точно известную постоя иную упругости и его можно очень точно изготавливать в отношении желаемых размеров, например, за счет травления.
На верхнем конце упругого элемента 2 закреплен инерционный элемент 3. Этот инерционный элемент 3 состоит из корпуса 4 и окружающего корпуса А покрытия 5 для создания требуемого качества поверхности инерционного элемента 3.
Форма упругого элемента 2 в виде платы была выбрана для того, чтобы датчик ускорения селективно определял компоненту ускорения в совершенно определенном заданном пространственном направлении. Эта компонента ускорения проходит под прямым углом к плоскости упругого элемента 2, выполненного в виде изгибного вибратора. Для достижения желаемой постоянной упругости в зоне между зажимом на основании 1 и массой 3 могут предусматриваться окна 6 в пластине упругого элемента 2.
Из оснований 1 выступает вверх стойка 7, на которой через изолятор 8 закреплено устройство перемещения 9 для наконечника 10. Устройство перемещения 9 состоит из пьезокристалла, на противолежащей друг другу торцевых сторонах которого предусмотрены электроды 11, 12. Наконечник 10 закреплен на электроде 12 с промежуточным включением изоляции 13 таким образом, что он направлен на боковую поверхность инерционного элемента 3.
Если на инерционный элемент 3 воздействует усилие ускорения, направленное поперек поверхности упругого элемента 2, то
упругий элемент 2 действует как изгибнсй вибратор, то есть он изгибается таким образом, что инерционный элемент 3 перемещается либо в направлении наконечника 10, либо в сторону от него. Датчик ускорений обладает большой селективностью по направлению. Для определения ускорений в обоих других: пространственных направлениях могут соответственно предусматриваться такие же датчики ускорений, у которых упругий элемент расположен под прямым углом к упругому элементу 2.
Весь датчик ускорений расположен в герметичном по давлению корпусе 14, в который входит труба 15, присоединенная к источнику газа.
Далее с помощью фиг. 2 поясняется принципиальный способ действия датчика ускорений.
Наконечник 10 находится .на малом расстоянии от инерционного элемента 3. Это расстояние составляет несколько 10-10 м. Источник тока 16 подключен одним полюсом к упругому элементу 2 и через этот упругий элемент соединен с электропроводным инерционным элементом 3. Другой полюс источника тока 16 через амперметр 17 соединен также проводящим наконечником 10. Источник тока 16, напряжение которого составляет 6 Вольт, производит между наконечником 10 и инерционным элементом 3 туннельный ток, сила которого измеряется амперметром 17. Выходной сигнал амперметра 17 подводится к регулятору 18, которым управляет источником-высокого напряжения 19. Выходные провода источника высокого напряжения 19 соединены с электродами 11 и 12 на обоих концах устройства перемещения 9. В связи с тем, что это устройство перемещения 9 состоит из пьезокристалла, оно изменяет свою длину в зависимости от величины приложенного на его концах высокого напряжения. Регулятор 18 варьирует длину устройства перемещения 9 таким образом, что туннельный ток между наконечником 10 и инерционным элементом 3 остается постоянным. За счет этого также остается постоянным расстояние между наконечником 10 и инерционным элементом, то есть наконечник 10 отслеживает перемещение инерционного элемента 3 с постоянным расстоянием. Выходной сигнал 20 регулятора 18 образует измерительный сигнал, пропорциональный отклонению инерционного элемента 3 от его исходного положения.
Для калибровки датчика ускорений производят измерение при аоэдействующем на инерционный элемент 3, вначале неизвестном усилии ускорения, при этом на выходной линии 20 получают выходной сигнал. Это изменение производят тогда, когда в корпусе 14 имеется низкая плотность газа. 5 Для этого давление газа в корпусе 14 уменьшают. Вслед за тем через присоединение 15 давление газа и тем самым плотность газа в корпусе 14 повышают до тех пор, пока не будет установлена определенная плотность
0 газа. Тогда производят второе измерение при том же имеющемся ускорении. Вследствие повышенного подъемного усилия инерционного элемента 3 при втором измерении отклонение инерционного элемента от его
5 исходного положения является меньшим, чем при первом измерении. Поэтому также уменьшенным является сигнал на выходной линии 20. Благодаря обоим измерениям с различным подъемным усилием, направлен0 ным противоположно усилию ускорения, и достигаемым при этом различным сигналам на выходной линии 20 определяют пропорциональность между выходным сигналом и абсолютным ускорением. Таким образом,
5 датчик ускорений откалиброван.
Вслед за калибровкой в течение длительного времени могут производиться измерения ускорения, причем используют либо пониженную плотность газа, либо по0 вышенную плотность газа. За счет того, что газ можно выводить из корпуса 14, имеется возможность проводить циклы калибровки с произвольной частотой.
При примере осуществления согласно
5 фиг. 3 дополнительно к описанному чувствительному элементу, наконечник 10 которого расположен на одной стороне инерционного элемента 3, на противолежащей стороне расположен следующий чувствительный
0 элемент, компоненты которого соответствуют компонентам первого чувствительного элемента и снабжены теми же ссылочными позициями, причем соответственно добавлена добавка а. Когда инерционный эле5 мент отклоняется от своего исходного положения в одну сторону, одно устройство перемещения 9, соответственно 9а, укорачивается, тогда как противолежащее устройство перемещения расширяется.
0 Пример согласно фиг. 3 является целесообразным в тех случаях, когда туннельный ток между наконечником 10 и инерционным элементом 3 изменяется лишь за счет измененного давления газа, или в том случае,
5 когда загрязнения на поверхности инерционного элемента 3 изменяют этот туннельный ток. Оба регулятора 9 и 9а соединены между собой таким образом, что их выходные сигналы вычитаются. В нормальном случае выходные сигнала регуляторов 9 и
18а равны по модулю и отличаются по знаку, так что вычитание этих выходных сигналов дает величину 0, когда инерционный элемент 3 находится в его среднем положении. Однако, разность выходных сигналов регуляторов 9 отличается от 0 в том случае, когда инерционный элемент 3 находится в отклоненном положении. Тем самым эту разность используют в качестве измерительного сигнала.
При описанных выше примерах осуществления инерционный элемент, несомый упругим органом, является свободно подвижным. Возможной является также форма осуществления, при которой на инерционный элемент воздействует устройство возврата, таким образом, что этот элемент при всех воздействующих усилиях ускорения удерживается в одном и том же положении. При этом для измерения ускорения может использоваться то усилие, которое прикладывается устройством возврата для того, чтобы удерживать инерционный элемент в заданном положении. При этом чувствительный элемент служит для регулирования усилия устройства возврата.
Формула изобретения 1. Способ калибровки датчика ускорения, заключающийся в измерении с помощью чувствительного элемента отклонения инерционного элемента, закрепленного на упругом элементе при действии ускорения, отличающийся тем, что. с целыю повышения точности калибровки, изменяют плотность среды, окружающей инерционный элемент, и при одинаковом ускорении измеряют отклонение инерционного элемента при различных
плотностях среды, а на основании зависимости отклонения инерционного элемента от плотности среды определяют абсолютное ускорение с учетом известной констан- ты силы системы, состоящей из инерционного и упругого элементов.
2.Датчик ускорения, содержащий корпус, в котором расположены инерционный элемент, закрепленный на упругом элементе, и чувствительный элемент для определения положения инерционного элемента, отличающийся тем, что, с целью повышения точности измерения, инерционный элемент выполнен электропроводным,
чувствительный элемент выполнен в виде направленного на инерционный элемент наконечника, снабженного устройством его перемещения для поддержания постоянного расстояния между инерционным элементом и наконечником, при этом последний соединен с измерительной цепью, включающей амперметр, подключенный к источнику тока, плюсовой полюс которого через упругий элемент соединен с инерционным элементом, регулируемый источник напряжения, соединенный своими выходами с электродами устройства перемещения наконечника, а входом - с выходом регулятора, подключенного к амперметру, причем
корпус выполнен герметичным, а его полость заполнена газом или жидкостью.
3.Датчик по п. 2, отличающийся тем, что, с целью измерения знакопеременного ускорения, в него введен второй аналогичный чувствительный элемент, расположенный по другую сторону от инерционного элемента и подключенный к введенной второй измерительной цепи, аналогичной первой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЕТЕКТИРОВАНИЯ ФЛУОРЕСЦЕНЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧИМЫХ ПАРАМЕТРОВ РАСТИТЕЛЬНОСТИ | 1998 |
|
RU2199730C2 |
| Датчик ударных ускорений | 1977 |
|
SU664104A1 |
| НАНОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2008 |
|
RU2391673C2 |
| Двухкомпонентный датчик ускорения | 1988 |
|
SU1569724A1 |
| ТВЕРДОТЕЛЬНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2018 |
|
RU2692122C1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| ДАТЧИК УСКОРЕНИЯ | 1991 |
|
RU2014619C1 |
| ИНТЕГРАЛЬНЫЙ ДАТЧИК УСКОРЕНИЯ | 2016 |
|
RU2639610C1 |
| ДАТЧИК УСКОРЕНИЯ | 2000 |
|
RU2247992C2 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ С ЖИДКОСТНЫМ РОТОРОМ | 2014 |
|
RU2594035C2 |
Изобретение относится к измерительной технике. Сущность изобретения: датчик ускорений имеет упругий элемент, на котором закреплен инерционный элемент. При возникновении усилия ускорений упругий элемент деформируется. Для измерения абсолютной величины ускорения может проводиться калибровка. При этой калибровке при определенной плотности газа, окружающего инерционный элемент, получают измеряемую величину ускорения на основании отклонения инерционного элемента. Вслед за тем при измененной плотности газа, окружающего инерционный элемент, проводят второе измерение того же ускорения и тем самым получают вторую измеряемую величину. С помощью разностей плотностей газа и измеряемых величин может быть рассчитана при дальнейших измерениях абсолютная величина ускорения. На основании датчика один конец упругого элемента и закреплено устройство перемещения для наконечника. Устройство перемещения состоит из пьезокристалла, на противолежащий друг другу торцевых сторонах которого предусмотрены электроды. Наконечник закреплен на одном электроде. Наконечник находится на малом-расстоянии от инерционного элемента. 2 с. и 1 з.п. ф-лы, 3 ил. СП С
five.f
pe/e.2
ср(/ез
| Заявка ФРГ N° 3631651, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
