Предлагаемое изобретение относится к области приборостроения и измерительной техники и может быть использовано для изготовления датчиков, работающих на принципе перемещения инерционной массы при изменении величины ускорения перемещающихся объектов.
Известно устройство для измерения ускорения, содержащее размещенные в корпусе чувствительный элемент в виде инерционной массы и исполнительный механизм (патент РФ №2106641, МПК G 01 NP 15/04, публ. 10.03.98 г, БИ №7/98).
Известно в качестве наиболее близкого к заявляемому устройство датчика для измерения ускорений (патент РФ №2014619, заявка №4955527, МПК G 01 Р 15/12, публ. 15.06.94 г., БИ №17/94 г.), включающее корпус, заполненный средой, подвижный чувствительный элемент, установленный коллинеарно измеряемому вектору ускорения, фиксирующий элемент, исполнительный механизм.
К недостаткам известных устройств относятся проблематичность измерения фактической произвольной величины ускорений, поскольку данные устройства работают в пороговом режиме и обеспечивают регистрацию только превышения заданной пороговой величины ускорений.
Задачей предлагаемого изобретения является разработка датчика для измерения критических или максимальных ускорений произвольной величины перемещающихся объектов в условиях экстремальных давлений и температур или пожара с высокими чувствительностью и точностью.
Новый технический результат заключается в обеспечении возможности измерений фактических ускорений объекта в экстремальных условиях пожара или при высоких температурах и в повышении точности и чувствительности измерений при регистрации изменения ускорений за счет минимизации обратного хода измерительного (чувствительного) элемента.
Указанные задача и новый технический результат обеспечены тем, что в отличие от известного датчика ускорений, содержащего корпус, подвижный чувствительный элемент, установленный коллинеарно вектору измеряемого ускорения, фиксирующий элемент, исполнительный механизм, в качестве чувствительного элемента датчика установлены инерционные массы, выполненные в виде жестко фиксированных последовательно вдоль оси чувствительного элемента усеченных конических деталей, вершины которых ориентированы в направлении, обратном перемещению чувствительного элемента, каждая из которых подпружинена упругим элементом относительно торца корпуса с возможностью осевого перемещения в направлении упругого элемента, а в качестве исполнительного механизма датчик содержит катушку индуктивности, которая взаимодействует с перемещающимся в ее полости подвижным сердечником, который жестко соединен с усеченными коническими деталями чувствительного элемента, сердечник с чувствительным элементом установлены с возможностью ограничения обратного перемещения последних относительно направления вектора измеряемого ускорения посредством последовательно установленных шариковых фиксаторов, размещенных между соответствующей усеченной конической деталью чувствительного элемента и корпусом таким образом, что шариковые элементы фиксаторов взаимодействуют с боковой поверхностью усеченных конических деталей чувствительного элемента.
Сущность заявляемого датчика ускорения поясняется следующим образом.
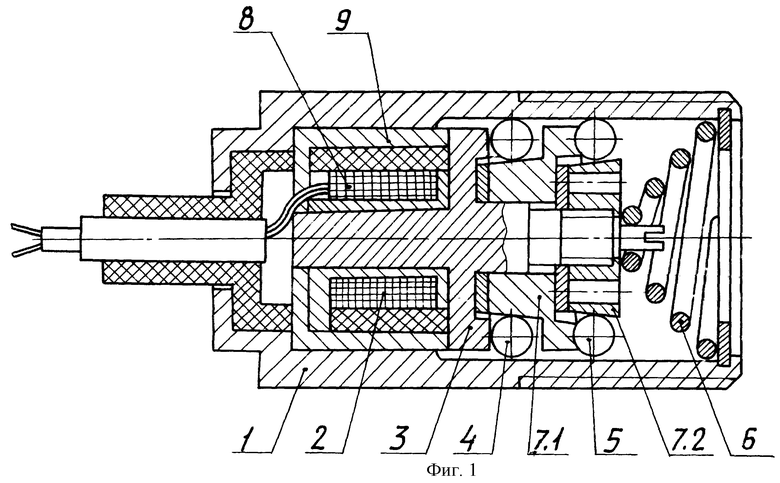
На фиг.1 изображено устройство предлагаемого датчика ускорений, где 1 - корпус с крышкой датчика, 2 - катушка индуктивности исполнительного механизма, 3 - подвижный сердечник катушки индуктивности, 4, 5 - соответственно первый и второй шариковые фиксаторы, 6 - упругий элемент, 7.1, 7.2 - усеченные конические детали в качестве инерционной массы чувствительного элемента 7; 8 - магнитопровод катушки индуктивности, 9 - магнитный контур исполнительного механизма.
Датчик ускорения содержит корпус 1, выполненный в виде полой, преимущественно цилиндрической детали, внутри которой размещены исполнительный механизм, основным функциональным элементом которой является катушка 2 индуктивности с магнитопроводом 8 и магнитным контуром 9, а также подвижный сердечник 3, за счет срабатывания которых формируется выходной сигнал датчика, пропорциональный перемещению подвижного сердечника 3 совместно с чувствительным элементом 7, а также шариковые фиксаторы 4, 5, ограничивающие обратное перемещение чувствительного элемента в момент измерения заданной или критической величины ускорений.
Катушка индуктивности 2 и ее функциональные составляющие: магнитный контур 9 с магнитопроводом 8 - составляют основу воспринимающего звена исполнительного механизма, поскольку изменение индуктивности катушки, происходящее при перемещении магнитного сердечника 3, вызывает появление измерительного сигнала датчика, передаваемого в измерительное устройство.
Подвижный сердечник 3 катушки 2 совместно с усеченными коническими деталями 7.1 и 7.2 выполняют функцию чувствительного элемента, воспринимающего максимальное изменение измеряемого ускорения по инерционному принципу. Измерение максимальной величины ускорения в предлагаемом датчике происходит путем фиксации усеченных конических деталей чувствительного элемента в краевой точке его инерционного перемещения посредством шариковых фиксаторов 4,5.
Предлагаемый датчик работает следующим образом.
При максимальном изменении ускорения на усеченные конические детали чувствительного элемента датчика, установленного коллинеарно вектору измеряемых ускорений, воздействуют усилия, направленные в сторону упругого элемента, приводящие к перемещению чувствительного элемента по направлению к упругому элементу 6.
В предлагаемом датчике ускорений точность измерений строго критична к направленности расположения оси чувствительного элемента именно коллинеарно направлению вектора измеряемого ускорения, поскольку при ином его расположении измеряется проекция измеряемой векторной величины на ось чувствительного элемента датчика. В случае, например, перпендикулярного состояния указанных осей такая проекция имеет нулевое значение и измерение определяемой величины не реализуется. В иных случаях расположения датчика ускорения также не реализуется точность измерения ускорения предлагаемым прибором в связи с тем, что чувствительный элемент при этом переместится на расстояние, пропорциональное проекции вектора ускорений на его ось.
При перемещении чувствительного элемента с жестко соединенным с ним подвижным сердечником 3 катушки 2 происходит размыкание магнитного контура 9, образованного магнитопроводом 8 исполнительного механизма. Изменение индуктивности катушки 2 в разомкнутом состоянии относительно величины индуктивности последней в состоянии замкнутого контура и определяет величину измерительного сигнала, пропорционального максимальной величине измеряемого ускорения. Поскольку инерционность изменения магнитных параметров катушки в предлагаемом датчике минимальна, то обеспечивается и максимальное соответствие величины перемещений чувствительного элемента и сердечника и пропорциональной этому перемещению величины измеряемого ускорения с минимальной погрешностью, на чем и основано повышение чувствительности измерений.
Обратное перемещение чувствительного элемента при уменьшении величины измеряемого ускорения затруднено за счет срабатывания шарикового фиксирующего механизма (шариковые фиксаторы 4,5) датчика.
Срабатывание шарикового фиксирующего механизма стопорения и задействующих его элементов обеспечивают достижение достаточно высокой точности измерения ускорения за счет надежного предотвращения обратного хода подвижного сердечника совместно с чувствительным элементом, что сводит к минимуму погрешность измерений.
Экспериментально показано повышение эффекта фиксации при использовании двух фиксирующих элементов 4,5, установленных между двумя последовательно фиксированными усеченными коническими деталями 7.1 7.2, т.к. в этом случае инерция торможения чувствительного элемента из-за наличия дефектов внутренней поверхности корпуса датчика минимальна. На проявлении указанного эффекта основано повышение точности измерений величины ускорения.
В устройстве прототипа датчик работает в пороговом режиме, что затрудняет измерение ускорений, величина которых превышает пороговое значение датчика или значительно меньше этого значения. Измерение произвольной фактической величины ускорения, соответствующей критическому состоянию контролируемого объекта, становится возможным при использовании принципа измерений, заложенного в заявляемом датчике, который работает в аналоговом режиме измерений.
Использование предлагаемого датчика ускорения возможно без потери работоспособности в условиях критических давлений и температур, поскольку в его конструкции отсутствуют чувствительные к указанным условиям материалы и элементы.
Таким образом в предлагаемом датчике ускорения обеспечены высокие точность и чувствительность измерений произвольной величины ускорений за счет задействования в качестве исполнительного механизма катушки индуктивности с переменной индуктивностью, зависящей от положения подвижного сердечника, жестко соединенного с чувствительным элементом, выполненным в виде инерционных масс, состоящих из усеченных конических деталей, с вершинами, ориентированными в направлении, обратном перемещению чувствительного элемента, каждая из которых подпружинена упругим элементом относительно корпуса с возможностью осевого перемещения в направлении упругого элемента и ограничением обратного перемещения в момент измерения критической величины ускорения относительно направления вектора измеряемого ускорения посредством последовательно установленных шариковых фиксаторов, размещенных между соответствующей усеченной конической деталью чувствительного элемента и корпусом таким образом, что шариковые элементы фиксаторов взаимодействуют с боковой поверхностью усеченных конических деталей чувствительного элемента.
Возможность промышленной реализации предлагаемого датчика подтверждается следующим примером.
Пример. Предлагаемое устройство реализовано в виде опытной модели, изображенной на фиг.1. Корпус датчика 1 выполнен из медного сплава, например из латуни марки ЛO62-1, (ГОСТ 15527-70), в котором размещена в качестве исполнительного элемента датчика катушка индуктивности 2, содержащая магнитопровод 8, выполненный из стали 08 кп (ГОСТ 1050-88), в который вставлен каркас, выполненный из сплава Д16 (ГОСТ 4784-74). На каркас намотан провод ПЭВ 0,07 (ГОСТ 7262-78).
Внутри катушки индуктивности размещен подвижный сердечник 3, выполненный из стали марки 08 кп (ГОСТ 1050-88). Сердечник жестко соединен с усеченными коническими деталями 7.1 и 7.2 чувствительного элемента, выполненного из стали марки 08 кп (ГОСТ 1050-88).
В корпусе установлена в качестве исполнительного механизма катушка индуктивности (2), содержащая каркас, выполненный также из немагнитного материала - из алюминиевого сплава марки Д16 (ГОСТ 4784-74), на котором размещен провод ПЭВ 0,07 (ГОСТ 7262-78), число витков провода 900.
Катушка также содержит усилитель (9) в виде магнитопровода из магнитомягкой стали марки 08 кп (ГОСТ 1050-88), что обеспечивает работоспособность катушки. Катушка взаимодействует с сердечником (3), выполненным из стали 08 кп (ГОСТ 1050-88).
В начальный момент работы датчика при замкнутой магнитной цепи магнитопровода и сердечника (3) индуктивность катушки, замеренная измерителем HRC 3050 на несущей частоте 100 Гц, равна 0,05 гн.
В момент измерений величины ускорения индуктивность катушки соответствовала 0,5 гн.
Фиксированный измерительный сигнал датчика ускорения составил величину 10 м/сек2 +/- 0,3 м/сек2.
Перемещение чувствительного элемента на конечную позицию, соответствующую критической величине ускорения, передается на исполнительный механизм датчика (катушку индуктивности 2), изменение показателя магнитного потока (индуктивности) которой трансформируется в измерительный сигнал и передается на регистрирующий прибор.
Экспериментальная проверка опытного образца датчика показала, что зависимость индуктивности катушки датчика от изменения величины ускорения (фиг.2) имеет вид крутой ветви параболы, обращенной вниз, что является свидетельством высокой чувствительности предлагаемого датчика ускорения, на чем основана и более высокая точность определения фактической величины ускорения.
Таким образом, в заявленном устройстве обеспечены более высокие чувствительность и точность измерений и возможность определения фактической величины ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ТЕМПЕРАТУРЫ | 1999 |
|
RU2201634C2 |
| Датчик крутильных колебаний | 2016 |
|
RU2615915C1 |
| Преобразователь ускорений | 1981 |
|
SU1078337A1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| ДАТЧИК ТЕМПЕРАТУРЫ | 2003 |
|
RU2241965C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ИЗДЕЛИЙ | 2006 |
|
RU2316420C2 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ИЗДЕЛИЙ | 2010 |
|
RU2447984C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| ДАТЧИК ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840393A2 |

Использование: в области приборостроения и измерительной техники. Может быть использовано для изготовления датчиков, работающих на принципе перемещения инерционной массы. В качестве чувствительного элемента датчика установлены инерционные массы, выполненные в виде жестко фиксированных последовательно вдоль оси чувствительного элемента усеченных конических деталей 7.1, 7.2, мнимые вершины которых ориентированы в направлении, обратном направлению перемещения чувствительного элемента, каждая из которых подпружинена упругим элементом 6 относительно торца корпуса с возможностью осевого перемещения в направлении упругого элемента, а в качестве исполнительного механизма датчик содержит катушку индуктивности 2, которая взаимодействует с перемещающимся в ее полости подвижным сердечником 3, который жестко соединен с усеченными коническими деталями чувствительного элемента, сердечник с чувствительным элементом установлены с возможностью ограничения обратного перемещения последних относительно направления вектора измеряемого ускорения посредством последовательно установленных шариковых фиксаторов 4,5, размещенных между соответствующей усеченной конической деталью чувствительного элемента и корпуса таким образом, что шариковые элементы фиксаторов взаимодействуют с боковой поверхностью усеченных конических деталей чувствительного элемента. Технический результат: повышение чувствительности и точности при регистрации изменения ускорений за счет минимизации обратного хода измерительного элемента. 2 ил.
Датчик ускорения, содержащий корпус, подвижный чувствительный элемент, установленный коллинеарно измеряемому вектору ускорения, фиксирующий элемент, исполнительный механизм, отличающийся тем, что в качестве чувствительного элемента датчика установлены инерционные массы, выполненные в виде жестко фиксированных последовательно вдоль оси чувствительного элемента усеченных конических деталей, вершины которых ориентированы в направлении, обратном перемещению чувствительного элемента, каждая из которых подпружинена упругим элементом относительно торца корпуса с возможностью осевого перемещения в направлении упругого элемента, а в качестве исполнительного механизма датчик содержит катушку индуктивности, которая взаимодействует с перемещающимся в ее полости подвижным сердечником, который жестко соединен с усеченными коническими деталями чувствительного элемента, сердечник с чувствительным элементом установлены с возможностью ограничения обратного перемещения последних относительно направления вектора измеряемого ускорения посредством последовательно установленных шариковых фиксаторов, размещенных между соответствующей усеченной конической деталью чувствительного элемента и корпусом таким образом, что шариковые элементы фиксаторов взаимодействуют с боковой поверхностью усеченных конических деталей чувствительного элемента.
| ДАТЧИК УСКОРЕНИЯ | 1991 |
|
RU2014619C1 |
| ДАТЧИК ПРЕДЕЛЬНОГО УСКОРЕНИЯ | 1995 |
|
RU2106641C1 |
| RU 2053514 С1, 27.01.1996 | |||
| US 5372041 А, 13.12.1994 | |||
| US 3662606 А, 16.05.1972 | |||
| DE 4027046 А, 11.04.1991. | |||

