Предлагаемое изобретение относится к гидроавтоматике, в частности к способам управления рулевыми приводами в летательных аппаратах.
Целью изобретения является повышение надежности управления многоканальным приводом путем уменьшения взаимного нагружения каналов при наличии жесткой связи между каналами управления.
Поставленная цель достигается тем, что наряду с имеющимися в каждом канале отрицательными обратными связями (ООС) по разнице перепадов давлений и скорости изменения разницы перепадов давлений вводится ООС по скорости изменения разницы подачи объемных регулируемых насосов.
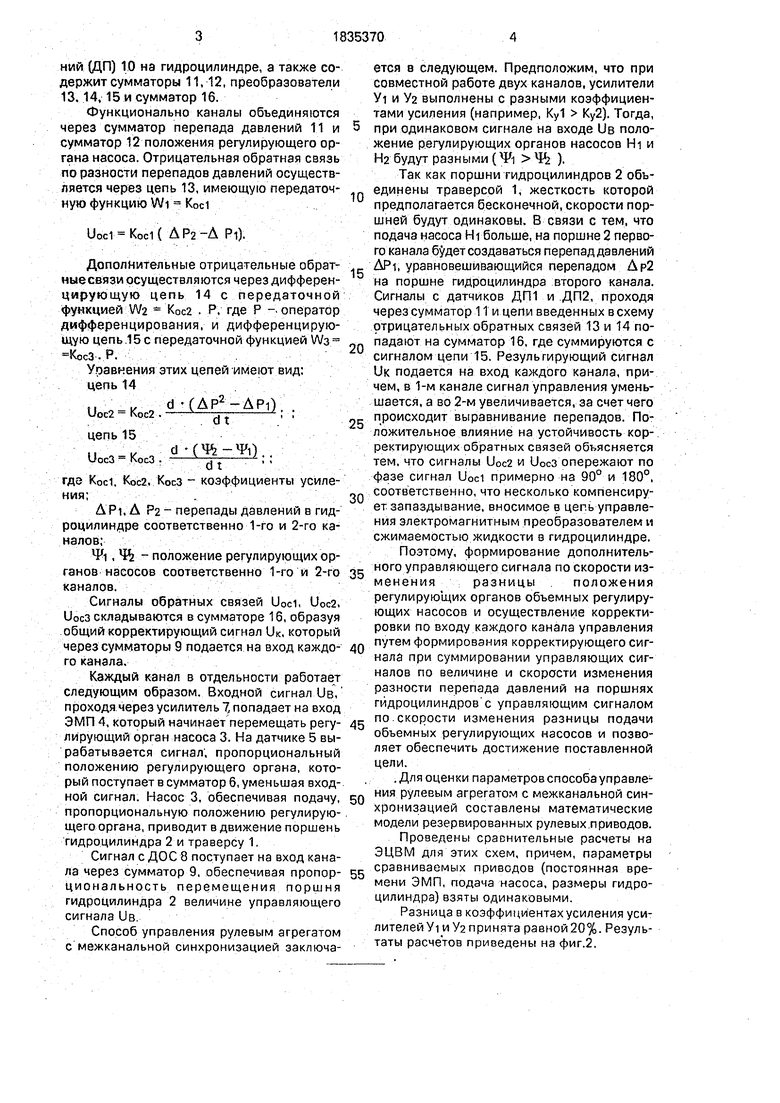
На фиг. 1 представлена функциональная схема устройства, реализующего способ управления рулевым агрегатом с межканальной связью на примере двухканального
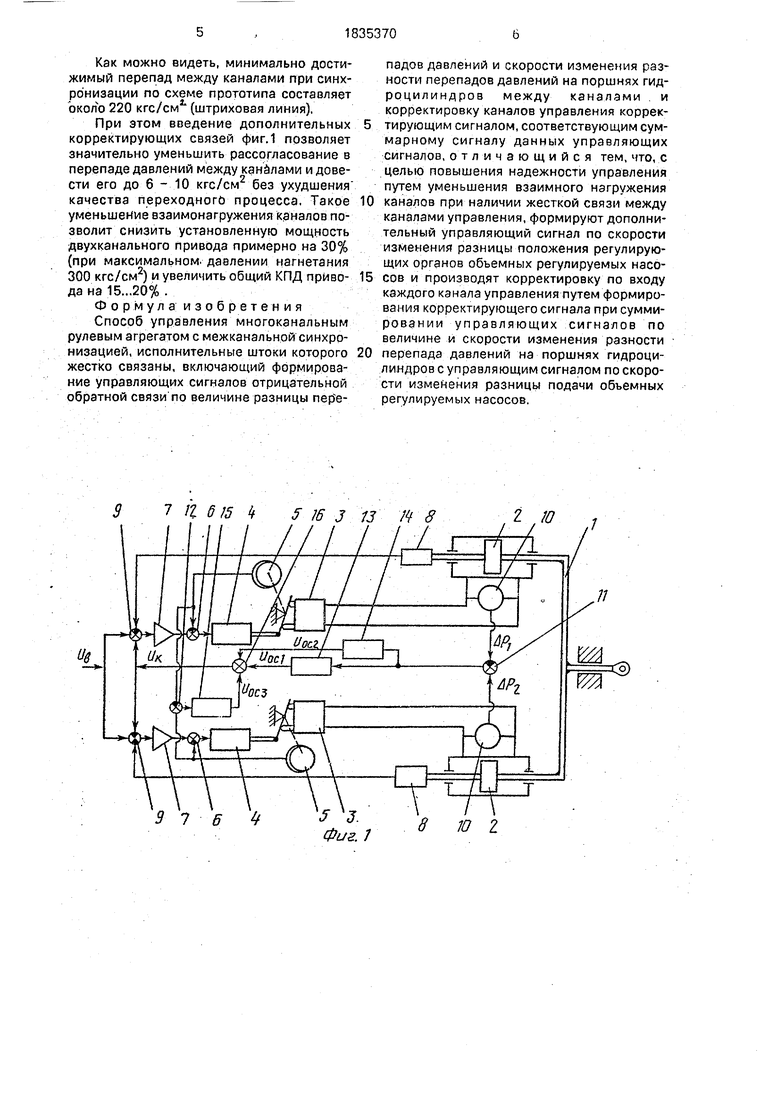
привода; на фиг.2 - сравнительные кривые переходных процессов по перепаду давлений между каналами, полученные рассматриваемыми способами управления рулевым агрегатом с межканальной связью.
Схема устройства р Элизующего способ управления агрегатом с межканальной связью состоит из одинаковых, гидравлически не связанных между собой каналов, вы- ходн-ые звенья которых объединены траверсой 1. Каждый канал состоит из гидроцилиндра 2, регулируемого насоса 3, электромеханического привода (ЭМП) 4, осуществляющего регулирование насоса 3, датчика 5 обратной связи по положению регулирующего органа насоса (ДОСН), сумматора 6 по обратной связи ЭМП, электронного усилителя 7, датчика обратной связи (ДОС) 8 по положению поршня гийроцилин- дра, сумматора 9, датчика перепада язвпе00
со
СЛ W VJ
о
ний (ДП) 1.0 на гидроцилиндре, а также содержит сумматоры 11,12, преобразователи 13.14,15 и сумматор 16.
Функционально каналы объединяются через сумматор перепада давлений 1.1 и сумматор 12 положения регулирующего органа насоса. Отрицательная обратная связь по разности перепадов давлений осуществляется через цепь 13, имеющую передаточную ФУНКЦИЮ W1 Кос1
Uoc1 Kocl( ЛР2-Л Pi).
Дополнительные отрицательные обратные связи осуществляются через дифференцирующую цепь 14 с передаточной функцией W2 - КОС2 . Р. где Р -.оператор дифференцирования, и дифференцирующую цепь .15 с передаточной функцией Л/з
КосЗ. Р. : / .,, : : .
Уравнения этих цепей имеют вид: цепь 14
и v d (AP2-APQ. .
Uoc2 Koc2 . --1-ft-i , .
цепь 15
Uoc3 КосЗ
d -()..
dt
где K0cl. Koc2. КосЗ коэффициенты усиления;
Д Pi. A 2 - перепады давлений в гидроцилиндре соответственно 1-го и 2-го каналов;
lPi, ЧЈ - положение регулирующих органов насосов соответственно 1-го и 2-го каналов.
Сигналы обратных связей Uod, Uoc2, Uoc3 складываются в сумматоре 16, образуя общий корректирующий сигнал UK, который через сумматоры 9 подается на вход каждого канала.
Каждый канал в отдельности работает следующим образом. Входной сигнал UB, проходя через усилитель 7, попадает на вход ЭМП 4, который начинает перемещать регулирующий орган насоса 3. На датчике 5 вырабатывается сигнал; пропорциональный положению регулирующего органа, который поступает в сумматор 6, уменьшая входной сигнал. Насос 3, обеспечивая подачу, пропорциональную положению регулирующего органа, приводит в движение поршень гидроцилиндра 2 и траверсу 1.
Сигнал с ДОС 8 поступает на вход канала через Сумматор 9, обеспечивая пропорциональность перемещения поршня гидроцилиндра 2 величине управляющего сигнала UB.
Способ управления рулевым агрегатом с межканальной синхронизацией заключа0
ется в следующем. Предположим, что при совместной работе двух каналов, усилители У и У2 выполнены с разными коэффициентами усиления (например, Ку1 Ку2). Тогда,
при одинаковом сигнале на входе UB положение регулирующих органов насосов Hi и На будут разными ( 4fe ). .
Так как поршни гидроцилиндров 2 объединены траверсой 1, жесткость которой предполагается бесконечной, скорости поршней будут одинаковы, В связи с тем, что подача насоса Нч больше, на поршне 2 первого канала будет создаваться перепад давлений
APi, уравновешивающийся перепадом Ар2 на поршне гидроцилиндра второго канала. Сигналы с датчиков ДП1 и .ДП2, проходя через сумматор 11 и цепи введенных в схему отрицательных обратных связей 13 и 14 попадают на сумматор 16, где суммируются с сигналом цепи 15, Резулыирующий сигнал UK подается на вход каждого канала, причем, в 1-м канале сигнал управления уменьшается, а во 2-м увеличивается, за счет чего
происходит выравнивание перепадов. По- ложительное влияние на устойчивость кор-. ректирующих обратных связей объясняется тем, что сигналы U0c2 и U0c3 опережают по фазе сигнал U0d примерно на 90° и 180°, соответственно, что несколько компенсиру0
0
5
5
0
етзапаздывание, вносимое в цепь управления электромагнитным преобразователем и сжимаемостью жидкости в гидроцилиндре. Поэтому, формирование дополнительного управляющего сигнала по скорости изменения разницы . положения регулирующих органов объемных регулирующих насосов и осуществление корректировки по входу каждого канала управления
путем формирования корректирующего сигнала при суммировании управляющих сигналов по величине и скорости изменения разности перепада давлений на поршнях гйдроцилиндров с управляющим сигналом по.скорости изменения разницы подачи объемных регулирующих насосов и позволяет обеспечить достижение поставленной цели.
.Для оценки параметров способа управления рулевым агрегатом с межканальной синхронизацией составлены математические модели резервированных рулевых .приводов. Проведены сравнительные расчеты на ЭЦВМ для этих схем, причем, параметры
р. сравниваемых приводов (постоянная времени ЭМП, подача насоса, размеры гидроцилиндра) взяты одинаковыми.
Разница в коэффициентах усиления уси- лителейУт иУ2принята равной20%. Результаты расчетов приеедены на фиг.2.
Как можно видеть, минимально достижимый перепад между каналами при синхронизации по схеме прототипа составляет около 220 кгс/см1 (штриховая линия),
При этом введение дополнительных корректирующих связей фиг.1 позволяет значительно уменьшить рассогласование в перепаде давлений между каналами и довести его до 6 - 10 кгс/см2 без ухудшения качества переходного процесса. Такое уменьшение взаимонагружения каналов позволит снизить установленную мощность двухканального привода примерно на 30% (при максимальном, давлении нагнетания 300 кгс/см2) и увеличить общий КПД привода на 15...20% .
Формул а: изобретения
Способ управления многоканальным рулевым агрегатом с межканальной синхронизацией, исполнительные штоки которого жестко связаны, включающий формирование управляющих сигналов отрицательной обратной связи по величине разницы перепадов давлений и скорости изменения разности перепадов давлений на поршнях гид- ррцилиндров между каналами . и корректировку каналов управления корректирующим сигналом, соответствующим суммарному сигналу данных управляющих сигналов, отличающийся тем, что, с целью повышения надежности управления путем уменьшения взаимного нэгружения
0 каналов при наличии жесткой связи между каналами управления, формируют дополнительный управляющий сигнал по скорости изменения разницы положения регулирующих органов объемных регулируемых насо5 сов и производят корректировку по входу каждого канала управления путем формирования корректирующего сигнала при сумми- ровании управляющих сигналов по величине и скорости изменения разности
0 перепада давлений на поршнях гидроцилиндров с управляющим сигналом по скорости изменения разницы подачи объемных регулируемых насосов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2190129C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ДИНАМИЧЕСКОМУ ДАВЛЕНИЮ | 2024 |
|
RU2826237C1 |
Изобретение относится к гидроавтоматике, в частности к способам управления рулевыми приводами в летательных аппаратах. Целью изобретения является повышение надежности управления путем уменьшения взаимного нагружения каналов при наличии жесткой связи между каналами управления. Для этого в способе формируют дополнительный управляющий сигнал по скорости изменения разницы положения регулирующих органов объемных регулируемых насосов и производят корректировку по входу каждого канала управления путем формирования корректирующего сигнала при суммирова :ии управляющих сигналов по величине и скорости изменения разности перепада давлений на поршнях гидроцилиндров с управляющим сигналом по скорости изменения разницы подачи объемных регулируемых насосов. 2 ил.
48
I
8 ю г
| Проектирование следящих гидравлических приводов летательных аппаратов | |||
| /Под ред | |||
| Н.С.Гамынина | |||
| М.: Машиностроение, 1981 | |||
| с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Авторское свидетельство СССР № 1110082, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
