00
00
ел о
1...8, каждая из которых состоит из диодов. 1...5. блока релейного действия с управляющим 6 и исполнительными 7, 8 элементами; элементы индикации 9; программное поле 10, выполненное в виде диодной матрицы; датчики контроля команд 11...18; блок поддержания питания 19, состоящий из двух диодов и двух конденсаторов; ключ реверса 20 релейного действия с управляющим 21 и исполнительными 22 элементами; датчики контроля сбоев 23 и 24; выходные исполнительные органы 25...30 (например герконо- вые реле, входные цепи оптронов, магнитные пускатели и др.); установочный элемент 31. Устройство позволяет осуществить обратный ход работы за счет реверса питания в конце прямого хода, при этом на обратный ход устройства можно запрограммировать часть рабочего цикла или новый цикл работы исполнительных механизмов. Реверс питания осуществляется также при возникновении сбоя в работе путем замыкания датчиков 23 и 24, что приведет опять же к обр-атному-ходу и позволит.исправить сбой, причем повторяется только та часть цикла работы, которая проконтролирована датчиком контроля сбоя, а далее цикл работы продолжается по заданной программе. 1 з.п. ф-лы, 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Коммутатор | 1986 |
|
SU1786677A1 |
| Устройство для программного управления объектами | 1985 |
|
SU1303997A1 |
| Коммутатор | 1985 |
|
SU1267628A1 |
| Устройство адаптивной коммутации | 2015 |
|
RU2611261C1 |
| Устройство контроля режимов сварки дугового автомата | 1983 |
|
SU1155402A1 |
| Селективный распределитель команд | 1980 |
|
SU904029A1 |
| Устройство для испытания исполнительных механизмов протезов с электроприводами | 1976 |
|
SU598607A1 |
| Устройство для сигнализации о состоянии двухпозиционных исполнительных механизмов | 1984 |
|
SU1196931A1 |
| Селективный распределитель команд | 1981 |
|
SU997124A2 |
| УСТРОЙСТВО КОММУТАЦИИ | 2011 |
|
RU2485679C2 |
Изобретение относится к автоматике и может быть использовано в системах программного управления объектами, состоящими из ряда исполнительных механизмов, в различных областях промышленности - робототехнике, станкостроении, металлургии и др. Целью изобретения является расширение области применения и упрощение устройства путем обеспечения запрограммированного обратного хода коммутатора, например, для исправления сбоев в работе. Устройство сбдержит ячейки управления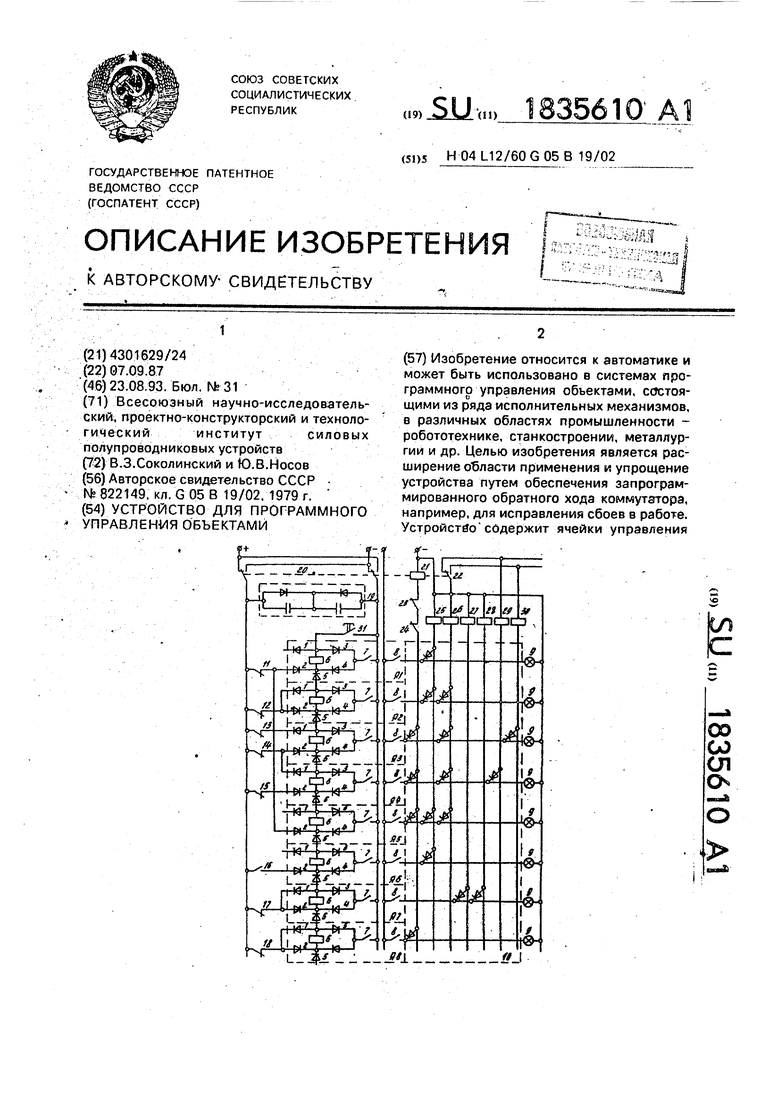
Изобретение относится к автоматике и может быть использовано в системах программного управления объектами, состоящими из ряда исполнительных механизмов, в различных- областях промышленности - робототехнике, станкостроении, металлургии и др....-.-
Целью изобретения является расширение области применения и упрощение устройствапутемобеспечениязапрограммированного обратного хода коммутатора, например, для исправления сбоев в.работе. .
На чертеже представлена электрическая принципиальная схема устройства.
Устройство содержит: ячейки управления (Я) 1-8, каждая из которых состоит из диодов 1...5, блока релейного действия с управляющим 6 и исполнительными, 8 элементами; элементы индикации 9; программное поле 10, в виде диодной матрицы; датчики контроля команд 11,..18; блок поддержания питания 19, состоящий из двух диодов и двух конденсаторов; ключ реверса 20 релейного действия с управляющим 21 и исполнительными 22 элементами; датчики контроля сбоев 23 и 24; выходные исполнительные механизмы 25...30 (например, гер- конные магнитные пускатели, реле, входные цепи оптронов и др.); установочный элемент 31.
Устройство работает следующим образом.
Рассмотрим режим исправления сбоев в исполнительных механизмах. Имеем часть цикла: робот берет деталь.присоской и перемещает ее на позицию сварки, где эта деталь приваривается, например, точечной сваркой; необходимо контролировать и исправлять сбои во время работы присоски и при сварке; если в процессе транспортировки присоска не удержала деталь и она отпала, то робот должен взять новую деталь с позиции загрузки; аналогично, если сварка проведена некачественно, то цикл сварки должен быть повторен; при этом сбои в работе присоски исправляются немедленно, т.е. независимо от того, на каком такте работы произошел сбой, а сварка контролируется в конце цикла.
При нажатии установочного элемента
31 включается ячейка управления 1 по цепи: + источника питания, первый переключающий контакт ключа реверса 21, датчик контроля команд 11, диод 2, обмотка 6 реле ячейки управления 1, установочный элемент
31, - источника питания. Реле 6 срабатывает и замыкает замыкающие контакты 7 и 8, ячейка управления 1 становится на самопитание, и загорается элемент индикации 9. При замыкании контакта 8 ячейки управления 1 включается исполнительный механизм 25 - рука робота опускается вниз. В нижнем положении срабатывает датчик контро ля команд 11, однако ячейка управления 1 отключиться не может, т.к. ячейка управления 2 в этом время включается по цепи: датчик контроля команд 12, диод 2, обмотка 6 реле ячейки управления 2 - диод 5, обмотка 6 реле, диод 3, замыкающий контакт 7 ячейки управления 1. Т.к. ток прошел
по обмотке 6 реле ячейки управления 2, то контакты 7 и 8 ячейки управления 2 замыкаются, ячейка управления 2 через контакт 7 становится на самопитание. При этом ячейка управления 1 отключается, т.к. контакт 7
и диод 3 ячейки управления 2 зашунтирова- ли обмотку б реле ячейки управления 1.
Таким образом после срабатывания датчика контроля команд 11 ячейка управления 2 включается, а ячейка управления 1
отключается. Т.к. ячейка управления 2 включилась, то включается исполнительный механизм 26, исполнительный механизм 25
остался включенным без перерыва питания ввиду того, что вначале включилась ячейка управления 2, а затем отключилась ячейка управления 1. Исполнительный механизм 26 подает вакуум на присоску. Контроль работы присоски осуществляет реле разрежения с контактами 12. 16, 23. После срабатывания присоски размыкающие контакты 12, 23 размыкаются, а замыкающий контакт 16 замыкается. Размыкание контакта 12 приводит к включению ячейки управления 3 по цепи: датчик контроля команд 14, диод 2, обмотка реле 6 ячейки управления ЯЗ - диод 5, обмотка реле 6, диод 3. контакт 7 ячейки управления Я2. Ячейка управления 3 включается, а ячейка управления 2 отключается, исполнительный механизм 25 отключается, а исполнительный механизм 26 остается включенным. Т.к. исполнительный механизм 25 отключается, то рука робота поднимается вверх. Верхнее положение руки контролируется датчиком контроля ко- манд 14, срабатывание которого приводит к включению ячейки управления 4 и отключению ячейки управления 3, при этом включается поворот руки вперед при помощи двухстабильного исполнительного механизма 29, перемещение которого контролируется датчиком контроля команд 15. После завершения поворота датчик контроля команд 15 срабатывает - вновь включается исполнительный механизм 25 и рука с деталью опускается вниз, т.к. ячейка управления 5 включилась, а ячейка управления 4 отключилась.
Допустим, что в момент опускания присоска не удержала деталь и она отпала, реле разряжения замыкает свой размыкающий контакт 23 и реле 21 срабатывает, полярность питания реверсируется. Датчик контроля команд 11 автоматически отключается, однако ячейка управления 5 остается включенной по цепи: контакт 7, диод 4, обмотка реле 6 - ячейки управления 5 - диод 5, обмотка реле 6, диод 1 ячейки управления 4 -датчик контроля команд 14. Т.к. ток проходит по обмотке 6, ячейка управления 4 включается и становится на самопитание по цепи: контакт 7, диод 4, обмотка реле 6, диод 1 ячейки управления 4, датчик контроля команд 14. замыкание контакта 7 ячейки управления 4 приводит к запиранию диода 5 ячейки управления 4 и отключению ячейки управления 5, Включение ячейки управления 4 приводит к отключению исполнительного механизма 25 - рука робота поднимается вверх. Когда она достигает верхнего положения, срабатывает датчик контроля команд 14. включается, ячейка управления 3 по дели: контакт 7, диод 4. обмотка реле 6 ячейки управления 4 - диод 5. обмотка реле 6, диод 1 ячейки управления 3, датчик контроля команд 13. Ячейка управления 3 включается, что приводит к отключе- 5 нию ячейки управления 4. При включении ячейки управления 3 срабатывает двухста- бильный исполнительный механизм 30 и рука робота поворачивается назад, что контролируется датчиком контроля команд 0 13, срабатывание которого отключает исполнительный механизм 30 и вновь включает исполнительный механизм 25, т.к. ячейка управления 2 включается, а ячейка управления З.отключается.
5При включении ячейки управления 2 реле 21 отключается, т.к. оно не запрограммировано включаться от ячейки управления 2, напряжение питания ячеек реверсируется. Т.к. при срабатывании исполнительного ме0 ханизма 25 рука робота опускается вниз, то в крайнем нижнем положении срабатывает присоска и контакты 12, 23, реле разряжения размыкаются, а контакт 16 замыкается. Таким образом при сбое в работе при5 соски, зафиксированном датчиком разряжения, робот берет новую деталь с позиции загрузки. Срабатывание контакта 12 реле разряжения приводит к включению ячейки управления 3 и отключению ячейки управле0 ния 2 - рука робота поднимается вверх. В верхнем положении срабатывает датчик контроля 14, включается ячейка управления 2 и отключается ячейка управления 3 - рука поворачивается вперед до срабатывания
5 датчика контооля команд 15. Срабатывание датчика 15 приводит к включению ячейки управления 5 и отключению ячейки управления 4 - рука робота опускается вниз, что контролируется датчиком контроля команд
0 11, срабатывание которого приводит к отключению вакуума присоски 26, включению ячейки управления 6 и отключению 5. Однако рука робота остается в нижнем положении до срабатывания датчикам разряжения
5 и отключения контакта 16.
Таким образом, если сбой присоски произошел при работе ячеек управления 3...5, а именно на их тактах она работает, то сбои в ее работе устраняются. Необходимо
0 отметить, что реальная схема содержит еще счетчик сбоев. Если сбой повторяется три- раза подряд, то выдается специальный сигнал (на чертеже эти цепи не показаны). Срабатывание контакта 16 реле разря5 жения приводит к включению ячейки управления 7 и отключению ячейки управления 6, при этом отключается исполнительный механизм 25 г рука робота поднимается вверх и запускается цикл сварки при помощи исполнительных механизмов 27, 28.
Пуст ь контроль тока сварки осуществляется, например, токовым реле, контакты 24 которого размыкаются, если при сварке ток был определенной величины. Если ток при сварке был меньше, например, из-за плохого контакта, окалины или загрязнения места сварки, то контакты 24 остаются замкнутыми.
Исполнительные механизмы 27, 28 осуществляют подачу сварочных электродов в зону сварки и запускают цикл сварки, завершение которого приводит к срабатыванию датчика контроля команд 17, что приводит к включению ячейки управления 8 и отключению ячейки управления 7. При отключении ячейки управления 7 сварочные электроды возвращаются в исходное состояние, что контролируется датчиком 18.
Если датчик контроля тока сварки разомкнул свои контакты 24, то реле 21 не включается и напряжение питания ячеек управления не реверсируется и срабатывание датчика 18 приводит к включению следующей по циклу ячейки.
Однако если датчик контроля тока сварки контакты 24 не разомкнул, то реле 21 срабатывает, напряжение питания ячеек управления реверсируется, и тогда при срабатывании датчика 18 включится ячейка управления 7, и цикл сварки повторится.
Таким образом, данное устройство позволяет исправить сбои в работе исполнительных механизмов, запрограммировать любой цикл, как при распределении команд вперед, так и при распределении команд назад. Это позволяет уменьшить число используемых ячеек управления и значительно повысить надежность работы.
Формула изобретения
ячейки, первый вывод переменного тока мостового выпрямителя каждой ячейки соединен с первым контактом первого исполнительного элемента блока релейного
действия, а вторые контакты первых исполнительных элементов всех ячеек соединены между собой, с вторым контактом установочного элемента, первый контакт которого подключен к аноду диодного моста первой
0 ячейки, с вторым выводом блока поддержания питания и общим выводом второго переключающего контакта ключа реверса, общий вывод первого переключающего контакта которого подключен к первому выводу
5 блока поддержания питания и к первым выводам датчиков контроля команд, вторые выводы которых подключены к выводам ячеек управления в различных вариантах, в соответствии с заданной программой, причем
0 к одной ячейке управления может быть подключено не более двух датчиков контроля команд, выводами каждой ячейки управления являются анод и катод рассоединенных диодов, образовавших второй вывод пере5 менного тока мостового выпрямителя этой ячейки, исполнительные механизмы, обмотки которых первыми клеммами подключены через диодную матрицу к вторым контактам, вторых исполнительных элементов ячеек
0 управления, первые контакты которых объединены и образуют шину - питания, причем количество и варианты подключения обмоток исполнительных механизмов определяются количество и расположением дио5 дов в узлах диодной матрицы, Ь элементов индикации, первые клеммы которых подключены к вторым клеммам вторых исполнительных элементов ячеек управления, а вторые клеммы элементов индикации объе0 динены и подключены к вторым клеммам обмоток части исполнительных механизмов, к шине + питания и к общему выводу третьего переключающего контакта ключа реверса, который двумя другими клеммми
5 третьего переключающего контакта подключен к вторым клеммам- обмоток остальных двух групп исполнительных механизмов, отличаю щееся тем, что, . с целью расширения области применения и
0 упрощения устройства, ключ реверса вы- полней в виде блока релейного действия, управляющий элемент которого подключен первой клеммой к шине + питания, а второй клеммой - к диоду диодной матрицы,
5 подключенному к второму исполнительному элементу последней по включению ячейки управления..
ющего элемента блока релейного действия включена цепочка датчиков контроля сбоя. ключа реверса и диодами диодной матрицы соединенных последовательно.
| Многоканальное устройство дляупРАВлЕНия Об'ЕКТОМ | 1979 |
|
SU822149A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
