Предлагаемое изобретение относится к области измерительной техники и может быть использовано для измерения динамических характеристик в процессе разработки и исследования современных компенсационных акселерометров.
Известен способ измерения динамических характеристик акселерометров путем задания гармонической вибрации на чувствительный элемент и измерения выходных сигналов датчиков смещения и силы, соответствующих задаваемым амплитудам и частотам вибровоздействия, описанный, например, в "Трудах предприятия", вып. 3, 1967 г. Недостатком этого способа является необходимость использования вибростенда для задания воздействия на акселерометр, что исключает возможность измерения в обычных лабораторных условиях. Наиболее близким к заявляемому является способ измерения динамических характеристик, предусматривающий размещение в чувствительном элементе дополнительного датчика момента, в который задается электрический сигнал, имитирующий гармоническое воздействие на акселерометр, и измеряются выходные сигналы с датчиков смещения и силы, описанный в "Трудах предприятия" вып. 1, 1968 г.
Основным недостатком данного способа является необходимость установки дополнительного датчика момента в чувствительный элемент, что не только сложно конструктивно, но и изменяет динамические характеристики акселерометра.
Целью предлагаемого изобретения является повышение точности и упрощение процесса измерения динамических характеристик. Эта цель достигается тем, что при способе измерения динамических характеристик компенсационного акселерометра путем подачи сигнала в одну из точек замкнутого контура акселерометра в датчик силы подают калиброванные по амплитуде и частоте электрические сигналы и по отношению амплитуд выходных сигналов датчика смещения и формирователя сигнала аналоговой обратной связи к амплитуде этих сигналов определяют динамические характеристики акселерометра, при этом датчик силы гальванически развязывают с источником калиброванных сигналов.
Предлагаемый способ предусматривает проведение следующих операций:
1. С источника калиброванных по амплитуде и частоте электрических сигналов через гальваническую развязку, например конденсатор или трансформатор, подают в датчик силы сигнал, имитирующий гармоническое ускорение (задаваемый сигнал).
2. Измеряют амплитуды выходных сигналов датчика смещения ("колебания подвижной системы") и формирователя сигнала аналоговой обратной связи ("выходной сигнал").
3. Определяют отношения амплитуд измеренных сигналов к амплитуде "задаваемого сигнала".
4. Повторяют операции по пп.1, 2, 3 для всего требуемого диапазона амплитуд и частот "задаваемого сигнала".
5. По результатам вычислений по операциям 3, 4 строят амплитудно-частотные характеристики замкнутой системы акселерометра "колебания подвижной системы - задаваемый сигнал" и "выходной сигнал - задаваемый сигнал", практически полностью определяющие динамические характеристики акселерометра.
На чертеже фиг.1 приведен пример структурной реализации предлагаемого способа. На чертеже обозначено:
1 - чувствительный элемент, включающий
2 - воспринимающий элемент,
3 - подвижную систему,
4 - датчик смещения,
5 - датчик силы;
6 - формирователь сигнала аналоговой обратной связи;
7 - устройство гальванической развязки;
8 - генератор калиброванных по амплитуде и частоте электрических сигналов;
А1, А2, А3 - "задаваемый сигнал", "колебания подвижной системы" и "выходной сигнал" соответственно.
Подвижная система 3 связана с датчиком смещения 4, выход которого через формирователь 6 соединен с датчиком силы 5. Выход генератора 8 через устройство гальванической развязки 7 подключен к датчику силы 5.
Сущность предлагаемого способа состоит в следующем.
При воздействии на акселерометр виброускорения в режиме полета или при задании его при помощи вибростенда в условиях испытаний амплитудно-частотные характеристики акселерометра "угол колебания подвижной системы - ускорение" и "выходной ток - ускорения" можно определить из передаточных функций Фα(р) и Фу(р), которые в соответствии с обозначениями фиг.1 примут вид:


Здесь W2(p)÷W6(p) - передаточные функции звеньев 2-6 по фиг.1.
При подаче задающего сигнала A1 в датчик силы 5 передаточные функции "угол колебания подвижной системы - задаваемый сигнал" - Ф'α(p) и "выходной ток - задаваемый сигнал" Ф'I(p) можно записать в виде:


Сопоставление полученных передаточных функции показывает, что их отличие заключается в наличии члена W5(p) в числителе выражений (3) и (4).
Учитывая, что в достаточно широком диапазоне частот вибровоздействий датчик силы 5 практически безинерционен, частотные характеристики, соответствующие передаточным функциям Фα(p) и Ф'α(p), также как и ФI(р) и Ф'I(p) будут практически идентичны друг другу при выборе "задаваемого сигнала", равным:
Таким образом, подавая сигнал с амплитудой, выбранной по выражению (5) в заданном частотном диапазоне, в датчик силы 5, измеряя сигналы А2 и А3 и определив отношения амплитуд этих сигналов к амплитуде сигнала А1, получаем амплитудно-частотные характеристики акселерометра по углу колебания подвижной системы и выходному току или напряжению, первая из которых позволяет оценить динамический коэффициент передачи акселерометра по углу, определяющий погрешность акселерометра при воздействии вибрационных и ударных возмущений, а вторая - позволяет оценить запас устойчивости системы акселерометра по амплитуде и фазе и его полосу пропускания, т.е. все необходимые динамические характеристики акселерометра.
Предлагаемый способ применим для акселерометров, у которых выходное сопротивление формирователя 6 не менее, чем на порядок больше сопротивления датчика силы 5, т.к. в противном случае результаты измерения будут существенно искажены из-за "затекания" части сигнала А1 в формирователь 6.
Введение гальванической развязки 7 датчика силы 5 от генератора 8 необходимо, т.к. в противном случае произойдет шунтирование датчика силы 5 и искажение результатов измерения или нарушение нормального функционирования акселерометра. Способ отличается более высокой точностью задания гармонических воздействий, т.к. электрические сигналы устанавливать и контролировать можно с большей точностью, чем механические перемещения вибростенда.
Проведенные испытания показали, что предлагаемый способ обеспечивает не менее чем на 20% повышение точности измерения характеристик, чем базовый. Кроме того, время испытаний снижается не менее чем в 3 раза - с 2 часов до 40 минут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1978 |
|
SU1839853A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ТЕНЗОМЕТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ДАВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2466368C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2377508C1 |
| УСТРОЙСТВО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ВВОДОВ И СИГНАЛИЗАЦИИ О СОСТОЯНИИ ИХ ИЗОЛЯЦИИ | 2006 |
|
RU2328009C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ПРОПОРЦИОНАЛЬНОСТИ МАЯТНИКОВОГО ДИСКРЕТНОГО АКСЕЛЕРОМЕТРА | 1984 |
|
SU1839865A1 |
Изобретение относится к области измерительной техники и может быть использовано для измерения динамических характеристик в процессе разработки и исследования современных компенсационных акселерометров. Сущность: с источника калиброванных по амплитуде и частоте электрических сигналов через гальваническую развязку в датчик силы чувствительного элемента подают сигналы. По отношению амплитуд выходных сигналов датчика смещения чувствительного элемента и формирователя сигнала аналоговой обратной связи к амплитуде этого сигнала определяют динамические характеристики акселерометра. При этом датчик силы гальванически развязывают от источника калиброванных сигналов. Технический результат: повышение точности и упрощение процесса измерения. 1 ил.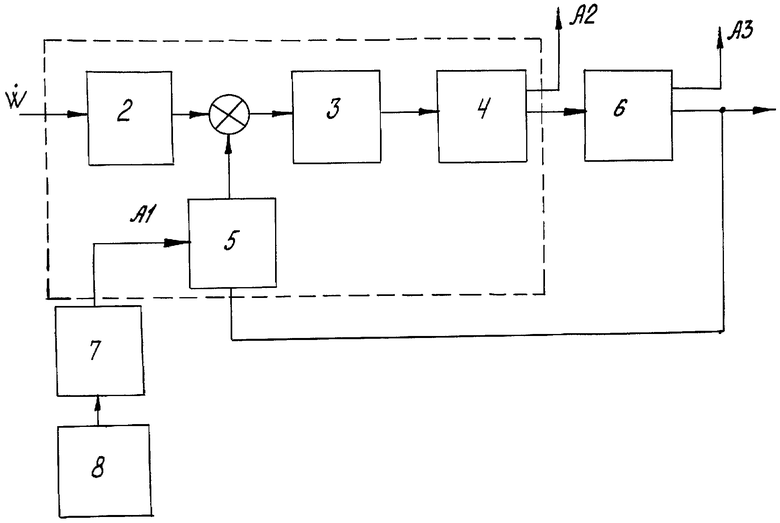
Способ измерения динамических характеристик компенсационного акселерометра, заключающийся в подаче сигнала в одну из точек замкнутого контура акселерометра, отличающийся тем, что, с целью повышения точности и упрощения процесса измерения, в датчик силы чувствительного элемента подают калиброванные по амплитуде и частоте электрические сигналы и по отношению амплитуд выходных сигналов датчика смещения чувствительного элемента и формирователя сигнала аналоговой обратной связи к амплитуде этого сигнала определяют динамические характеристики акселерометра, при этом датчик силы гальванически развязывают от источника калиброванных сигналов.

