Изобретение относится к измерительной технике и может быть использовано при исследовании параметров современных маятниковых компенсационных акселерометров с дискретным выходом.
Известен способ измерения погрешности пропорциональности акселерометра при помощи установки его чувствительного элемента на центрифугу и фиксации его выходной информации при задании дискретных значений линейных перегрузок (см., например, А.Е.Синельников. Низкочастотные линейные акселерометры. Методы и средства поверки, и градуировки. М., Издательство стандартов, 1979 г., стр.40-46).
Недостатками этого способа является то, что из оценки выпадают погрешности при промежуточных (между фиксированными задаваемыми значениями) перегрузках и нестабильность поддержания задаваемых перегрузок, снижающая точность измерения погрешности пропорциональности.
Наиболее близким к заявляемому является способ измерения погрешности пропорциональности маятникового компенсационного акселерометра с дискретным выходом (МДА), основанный на измерении интегрального значения его выходной информации при подаче на вход преобразователя "ток-частота" МДА тарированных электрических сигналов, соответствующих его входному току при воздействии дискретных значений линейных перегрузок на МДА, и сравнения с расчетной величиной, например, описанный в "Трудах предприятия" вып.3, 1967 г., стр.28-31.
Недостатками этого способа является зависимость измеряемой погрешности от точности и стабильности задаваемого тока, а также то, что, как и в вышеприведенном способе, не оценивается возможная погрешность пропорциональности в диапазоне перегрузок между имитируемыми тарированными сигналами, вследствие практической невозможности задания с необходимой точностью на вход преобразователя "ток-частота" плавно изменяющихся электрических сигналов.
Целью предлагаемого изобретения является повышение точности и разрешающей способности определения погрешности пропорциональности МДА.
Эта цель достигается тем, что в способе определения погрешности пропорциональности МДА путем сравнения интегральных значений выходной информации акселерометра с эталонной или расчетной величиной сравнивают интегральные значения выходной информации, замеренные в двух циклах измерения одинаковой продолжительности, в одном из которых кратковременно размыкают обратную связь акселерометра, причем длительность размыкания определяют исходя из условия недопустимости касания маятником чувствительного элемента механических упоров.
Среди известных авторами технических решений не обнаружена предлагаемая совокупность новых признаков, которая позволяет определить погрешность пропорциональности маятникового компенсационного акселерометра с дискретным выходом во всех точках диапазона измеряемых ускорений (от 1 g до максимального значения), при этом точность определения погрешности зависит только от точности измерения интегрального значения выходной информации акселерометра, поскольку динамическая погрешность современных МДА находится на уровне погрешности измерения. Следовательно, предложенный способ соответствует критерию "существенные отличия"»
Предлагаемый способ предусматривает проведение следующих операций:
1. Задаются временем цикла измерения выходной информации МДА исходя из необходимой точности измерения.
2. Устанавливают измерительную ось чувствительного элемента в положение максимальной чувствительности, т.е. соответствующее воздействию ускорения "собственного веса" - 1 g.
3. Производят интегральную оценку выходной информации акселерометра за заданное время, например, путем определения среднего периода его выходной частоты за время измерения.
4. Определяют максимальную допустимую длительность размыкания обратной связи МДА, исходя из условия недопустимости касания маятником чувствительного элемента механических упоров, это время tp можно определить как
где αуп - угол установки механических упоров,
Кg - коэффициент демпфирования чувствительного элемента (ЧЭ),
Квэ - коэффициент воспринимающего элемента ("маятниковость") ЧЭ,
g - ускорение силы тяжести.
5. Повторяют измерение по операции 3, в процессе которого размыкают отрицательную обратную связь МДА на время tp, определенное по операции 4.
6. При сравнении результатов измерений в двух циклах - по операциям 3 и 5 определяют погрешность пропорциональности МДА.
На чертеже приведен пример структурной реализации предлагаемого способа, где обозначено:
1 - чувствительный элемент акселерометра, включающий в себя:
2 - воспринимающий элемент (маятник);
3 - датчик момента;
4 - формирователь аналогового сигнала обратной связи, описанный, например, в "Трудах предприятия" 1967 г., вып.3, стр 42-45;
5 - аналого-цифровой интегратор МДА, описанный, например, в "Трудах предприятия" 1967 г., вып.3 стр.27-33;
6 - измеритель среднего периода выходной частоты МДА, например, типа частотомера Ф-5041;
7 - управляемое ключевое устройство, например, типа реле РЭС60;
8 - времязадающее устройство-таймер, например, типа описанного в книге В.Л.Шило. Линейные интегральные схемы. М.: Советское радио, 1979 г., стр.233-237.
Предлагаемый способ заключается в следующем.
При разрыве обратной связи акселерометра на время tp по цепи датчика момента 3 ток обратной связи акселерометра, являющийся в данной схеме МДА и входным током аналого-цифрового интегратора 5, становится равным нулю. Маятник 2 чувствительного элемента 1 отклоняется на максимально допустимый угол без касания механических упоров.
При замыкании обратной связи в системе акселерометра возникает переходный процесс, при котором ток обратной связи акселерометра (входной ток аналого-цифрового интегратора 5), а значит и выходная частота акселерометра, последовательно проходят весь диапазон измерения от максимального значения до значения, соответствующего ускорению 1 g. Таким образом, сравнение среднего значения периода выходной частоты акселерометра, измеренного при его непрерывной работе в фиксированной точке, диапазона измерения (1 g) и среднего значения периода выходной частоты, измеренного в той же точке диапазона за то же время измерения, но с кратковременным размыканием обратной связи на tp, позволяет оценить погрешность пропорциональности измерения ускорения во всем диапазоне измерения акселерометра. Разница между измеренными средними значениями периода в этих двух измерениях будет свидетельствовать о наличии погрешности измерения ускорений в одной из точек диапазона измерений акселерометра. Уменьшая время tp, можно сужать диапазон отклонения маятника акселерометра при переходном процессе, возникающем при замыкании обратной связи, и тем самым локализировать часть диапазона измерения, обуславливающую появление погрешности пропорциональности акселерометра, с целью проведения дополнительных испытаний в выявленном узком диапазоне.
Проведенные лабораторные исследования показали, что предлагаемый способ:
1. Подтвердил наличие погрешности пропорциональности в точках, соответствующих тарированным электрическим сигналам, зафиксированным при проверке способом. При этом величина погрешности пропорциональности, определенная обоими способами, оказалась практически идентичной.
2. Выявил наличие и позволил определить погрешность пропорциональности в точках диапазона измеряемых перегрузок промежуточных между имитируемыми электрическими сигналами. Специальные способы измерения подтвердили наличие и величину погрешности пропорциональности, зафиксированную предлагаемым способом.
Таким образом, в отличие от способа-прототипа предлагаемый способ позволяет определить величину погрешности пропорциональности акселерометра рассматриваемого типа в каждой точке диапазона измеряемых перегрузок с практически любой заданной точностью достаточно простыми техническими средствами. Кроме того, предлагаемым способом проверяется весь тракт канала акселерометра, включая чувствительный элемент и формирователь аналогового сигнала обратной связи, в то время как способ-прототип позволяет проверять только преобразователь - "ток-частота».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа | 2016 |
|
RU2627970C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ | 1985 |
|
SU1839979A1 |
| Прецизионный компенсационный маятниковый акселерометр | 1970 |
|
SU1839936A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1974 |
|
SU1839856A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| Компенсационный акселерометр | 1974 |
|
SU1839839A1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1981 |
|
SU1839852A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
Изобретение относится к измерительной технике и может быть использовано при исследовании параметров современных маятниковых компенсационных акселерометров с дискретным выходом. Сущность: способ осуществляется путем сравнения интегрального значения выходной информации акселерометра с его эталонной величиной. При этом сравниваемые интегральные значения выходной информации акселерометра измерены в двух циклах измерения одинаковой продолжительности. В одном из циклов кратковременно размыкают отрицательную обратную связь акселерометра. Длительность паузы размыкания определяют из условия недопустимости касания маятником чувствительного элемента механических упоров. Технический результат: повышение точности и разрешающей способности 1 ил.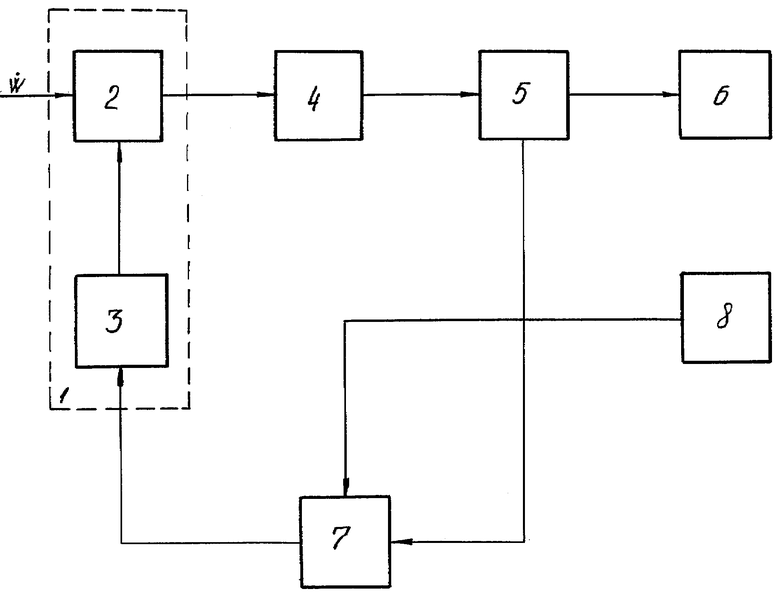
Способ измерения погрешности пропорциональности маятникового дискретного акселерометра путем сравнения интегрального значения выходной информации акселерометра с его эталонной величиной, отличающийся тем, что, с целью повышения точности и разрешающей способности, сравнивают интегральные значения выходной информации акселерометра, измеренные в двух циклах измерения одинаковой продолжительности, в одном из которых кратковременно размыкают отрицательную обратную связь акселерометра, причем длительность паузы размыкания определяют из условия недопустимости касания маятником чувствительного элемента механических упоров.

