Изобретение относится к области прецизионного приборостроения и может быть использовано при изготовлении криогенных гироскопов, предназначенных для инерциальных навигационных систем и систем управления движущимися объектами.
Известен способ приведения в рабочее состояние сверхпроводящего гироскопического устройства, включающий охлаждение ротора и элементов магнитного подвеса до состояния сверхпроводимости, взвешивание и разгон ротора, измерение скорости уходов как элементов регулирования [см. Малеев П.И. Новые типы гироскопов. - Судостроение: Ленинград, 1971 г., с.46-66; Левин Л.А., Жидков А.А., Малтинский М.И. Физические основы, элементы и устройство криогенного гироскопа. - ЦНИИ "Румб", 1979 г., с.86-96]. Такой способ не обеспечивает в конечном итоге высокой точности устройства, так как при его реализации сохраняются погрешности от неуравновешенности и момента Лондона. Момент Лондона присущ любому вращающемуся сверхпроводящему телу. Взаимодействие поля момента Лондона с полем магнитного подвеса сверхпроводящего ротора приводит к погрешности [см. Дж.Уильямс. Сверхпроводимость и ее техническое применение. - М.: Мир, с.274-280].
Из известных способов, содержащих в себе элементы регулирования, наиболее близким по технической сущности к предлагаемому изобретению является способ управления гироскопическим устройством со сверхпроводящим магнитным подвесом ротора, включающий охлаждение ротора и элементов магнитного подвеса до состояния сверхпроводимости, ориентирование корпуса устройства в заданном направлении, взвешивание и разгон ротора, периодическое переключение направления магнитного поля (после приведения устройства в состояние готовности производится измерение скорости ухода гироскопа при разных направлениях магнитного поля подвеса [авт. св. №536703, МКИ G 01 C 19/00]), принимаемый за прототип. Этот способ позволяет уменьшить погрешность от момента Лондона. Его сущность заключается в том, что направление ухода от момента Лондона зависит от направления магнитного поля подвеса. Для уменьшения погрешности в способе-прототипе производится периодическое переключение направления поля подвеса ротора, при неизменном направлении угловой скорости вращения ротора. Таким образом, при каждом изменении направления магнитного поля подвеса знак ухода изменяется. Суммарный уход равен разности из уходов при одном и другом направлениях поля подвеса. За длительный период работы прибора эта разность будет достаточно малой.
Недостатком способа, принятого за прототип, является недостаточно высокая точность устройства из-за того, что способ не обеспечивает устранения погрешности от дисбаланса.
Целью изобретения является повышение точности сверхпроводящего гироскопического устройства.
Указанная цель достигается тем, что в способе регулирования гироскопического устройства, включающем ориентирование устройства, охлаждение ротора и элементов магнитного подвеса до состояния сверхпроводимости, взвешивание и разгон ротора, измерение направления магнитного поля подвеса, измерение скорости уходов при различных ориентациях магнитного подвеса, одну из осей подвеса отриентируют вертикально, а после измерения скорости уходов при двух взаимно противоположных направлениях магнитного потока нижнего элемента подвеса устанавливают направление магнитного потока в обоих элементах этой оси подвеса, соответствующее меньшему измеренному уходу, а затем изменяют скорость вращения ротора до получения минимального ухода при такой ориентации устройства.
Сущность изобретения поясняется чертежом где представлена схема гироскопического устройства с одной осью подвеса. На чертеже изображены
1 - сферический сверхпроводящий ротор, у которого центр геометрии (ЦГ) и центр масс (ЦМ) смещены на величину дисбаланса ео;
2 - элемент подвеса, например короткозамкнутая сверхпроводящая катушка возбуждения магнитного поля;
 - скорость вращения ротора;
- скорость вращения ротора;
 - скорость вращения ротора при отклонении его оси вращения от оси подвеса;
- скорость вращения ротора при отклонении его оси вращения от оси подвеса;
Ф1, Ф2, Н1, Н2 - магнитный поток и напряженность магнитного поля в нижнем и верхнем зазорах;
 - направление ускорения силы тяжести;
- направление ускорения силы тяжести;
θ - угол между осью подвеса, совпадающей с направлением силы тяжести к осью вращения ротора;
Фл, Hл - поток и напряженность поля момента Лондона, возникающие во вращающемся сверхпроводящем роторе.
Вектор напряженности поля момента Лондона имеет направление, противоположное вектору угловой скорости вращения ротора. Величина момента Лондона определяется выражением
где m, q - масса и заряд электрона;
μ0 - магнитная проницаемость вакуума;
 - момент, возникающий за счет взаимодействия момента Лондона с магнитным полем подвеса ротора.
- момент, возникающий за счет взаимодействия момента Лондона с магнитным полем подвеса ротора.
Величина момента взаимодействия равна

где  - результирующее поле вокруг ротора, обусловленное ассиметрией поля подвеса, вызванной весом объема V ротора
- результирующее поле вокруг ротора, обусловленное ассиметрией поля подвеса, вызванной весом объема V ротора

Абсолютное значение скорости ухода за счет этого момента определяется выражением
где R - радиус ротора.
Направление скорости ухода определяется направлением векторов  и в выражении (2). При изменении направления , что в свою очередь определяется наибольшим полем Н1 при неизменном направлении скорости вращения
и в выражении (2). При изменении направления , что в свою очередь определяется наибольшим полем Н1 при неизменном направлении скорости вращения  , направление скорости ухода изменяется на обратное.
, направление скорости ухода изменяется на обратное.
 - момент, возникающий за счет неуравновешенности ротора.
- момент, возникающий за счет неуравновешенности ротора.
В роторе 1 за счет неравномерности плотности материала, неточности изготовления центр масс смещен относительно центра геометрии на величину дисбаланса е0. Дисбаланс создает уводящий и момент. Скорость ухода от дисбаланса (неуравновешенности) определяется выражением
Сравнение выражений (4) и (5) показывает, что скорость ухода от момента Лондона не зависит от угловой скорости  , а скорость ухода от дисбаланса обратно пропорциональна скорости вращения
, а скорость ухода от дисбаланса обратно пропорциональна скорости вращения  . Суммарная скорость ухода ротора гироскопического устройства будет равна
. Суммарная скорость ухода ротора гироскопического устройства будет равна

На чертеже пунктиром изображено положение ротора 1, когда вектор угловой скорости отклонен рт оси подвеса на угол θ. В этом случае момент дисбаланса будет направлен против часовой стрелки ( ) перпендикулярно плоскости чертежа. Для его компенсации необходимо, чтобы момент от поля Лондона (
) перпендикулярно плоскости чертежа. Для его компенсации необходимо, чтобы момент от поля Лондона ( ) был направлен по часовой стрелке. Конец вектора магнитного потека поля Лондона направлен вниз (против ) и совпадает с северным полюсом ротора. Тогда для создания момента, направленного по часовой стрелке, необходимо, чтобы северный полюс нижнего элемента подвеса был направлен к ротору, т.е. направление магнитного потока Ф1 должно быть вверх.
) был направлен по часовой стрелке. Конец вектора магнитного потека поля Лондона направлен вниз (против ) и совпадает с северным полюсом ротора. Тогда для создания момента, направленного по часовой стрелке, необходимо, чтобы северный полюс нижнего элемента подвеса был направлен к ротору, т.е. направление магнитного потока Ф1 должно быть вверх.
Нетрудно показать, что величины уходов ωн и ωл близки друг к другу. Например, для ротора с R=1,5·10-2 м при е0=5·10-8 м, (Н1+Н2)=105 А·м-1, Ω=1260 с-1, ωн≈0,2 град.ч-1, а ωл≈0,16 град.ч-1.
Таким образом, если выбрать такое направление поля подвеса, что уходы будут вычитаться, и установить скорость вращения, равную
то суммарный уход сверхпроводящего устройства будет равен нулю.
Для осуществления способа ориентируют устройство таким образом, чтобы одна из осей магнитного подвеса ротора была вертикальна. Для реализации предлагаемого способа точность выставки должна осуществляться с точностью в несколько градусов. После этого производят охлаждение гироскопического устройства с ротором и элементами магнитного подвеса до состояния сверхпроводимости. Охлаждение устройства производят, например, ступенчато, сначала заполнением криостата (на чертеже не показан) жидким азотом до температуры 77 К, а затем жидким гелием до температуры 4,2 К.
После охлаждения ротора и элементов подвеса производят взвешивание ротора. Для этого в катушки магнитного подвеса вводят токи, которые создают магнитные потоки Ф1 и Ф2. В магнитном поле на сверхпроводящий ротор действует диамагнитная сила, которая стремится вытолкнуть ротор из поля. Направление этой силы не зависит от направления магнитного поля. Под действием этой силы ротор взвешивается в положение, когда магнитная сила уравновешивает силу веса. Так как ускорение силы тяжести  направлено вниз, то напряженность поля в нижнем зазоре - Н1 будет больше, чем в верхнем - Н2.
направлено вниз, то напряженность поля в нижнем зазоре - Н1 будет больше, чем в верхнем - Н2.
Если катушки (или экран) короткозамкнутые, то после введения в них потока в них будет циркулировать незатухающий сверхпроводящий ток, и они могут быть отключены от источников питания.
Взвешенный ротор разгоняют до номинальной скорости вращения Ω, например, газовым двигателем (на чертеже не показан).
Возможно взвешивание ротора в несверхпроводящем состоянии, например, в электростатическом подвесе и разгон до номинальной скорости асинхронным приводом, а затем охлаждение до состояния сверхпроводимости во вращающемся состоянии, после чего включается магнитный подвес и при необходимости отключается электрический [по авт. св. №503430, G 01 С].
После разгона ротора измеряют скорость ухода ротора, а затем изменяют направление магнитного потока в нижнем элементе подвеса и вновь измеряют скорость ухода. Для измерения скорости ухода по датчику углового положения ротора (на чертеже не показан) за некоторое время определяют угол отклонения ротора от первоначального направления и вычисляют среднюю скорость ухода.
Изменение направления магнитного потока производят изменением направления тока в катушке элемента подвеса 2. По результатам измерения скорости ухода при двух взаимно противоположных направлениях магнитного потока нижнего элемента подвеса устанавливают направление магнитного потока в обоих элементах подвеса этой оси, соответствующее меньшему измеренному уходу, т.е. полярность магнитного потока нижнего элемента подвеса должна быть одинаковой с полярностью момента Лондона ротора. В соответствии с примером, приведенным на чертеже, полярность должна быть обращена северным полюсом к ротору, такую же полярность должен иметь верхний элемент подвеса этой оси. После этого изменяют скорость вращения ротора и измеряют скорость уходов, добиваясь минимума ухода ротора. Эти операции могут производиться, например, при разгоне ротора газовым двигателем до скорости, превышающей номинальную, например несколько более высокой, чем полученная по выражению (7), и измерении скорости уходов ротора при его постепенном торможении за счет остаточного газа. После определения оптимальной скорости, обеспечивающей минимум уходов при принятой ориентации, устанавливают эту скорость в устройстве.
Таким образом, положительный эффект повышения точности сверхпроводящего гироскопического устройства достигается за счет взаимной компенсации уходов от дисбаланса равными, но направленными в противоположную сторону уходами от момента Лондона, в отличие от известного технического решения, где периодическим переключением направления поля подвеса компенсируется только уход от момента Лондона.
Технико-экономический эффект предлагаемого изобретения заключается в повышении точности сверхпроводящего гироскопического устройства за счет взаимной компенсации уходов от дисбаланса уходами от момента Лондона. Применение предлагаемого изобретения позволит повысить точность устройства, а следовательно, и навигационных устройств, в которых оно применяется и повысить точность решения навигационных задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |
| КРИОГЕННЫЙ ГИРОСКОП | 1992 |
|
RU2011166C1 |
| Криогенный гироскоп | 2016 |
|
RU2643942C1 |
| Способ изготовления чувствительного элемента криогенного гироскопа | 2017 |
|
RU2678707C1 |
| КРИОГЕННЫЙ ФЕРРОМАГНИТНЫЙ ГИРОСКОП | 1992 |
|
RU2084825C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2016 |
|
RU2629690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДИСБАЛАНСА БЫСТРОВРАЩАЮЩИХСЯ ТЕЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085847C1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| Измерительное устройство к балансировочному станку | 1973 |
|
SU540182A1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при изготовлении криогенных гироскопов, предназначенных для инерциальных навигационных систем и систем управления движущимися объектами. Сущность: для осуществления способа ориентируют гироскоп, охлаждают его ротор и элементы магнитного подвеса до состояния сверхпроводимости. Взвешивают и разгоняют ротор гироскопа. Изменяют направление магнитного поля подвеса. Измеряют скорость уходов при различных ориентациях магнитного поля подвеса. Кроме того, устанавливают одну из осей подвеса вертикально. Измерение скорости уходов осуществляют при двух взаимопротивоположных направлениях магнитного потока в нижней катушке магнитного подвеса. Устанавливают направление магнитного потока в верхней и нижней катушках этой оси подвеса, соответствующее меньшему измеренному уходу. Изменяют скорость вращения ротора до получения минимального ухода при такой ориентации устройства. Технический результат: повышение точности сверхпроводящего гироскопа. 1 ил.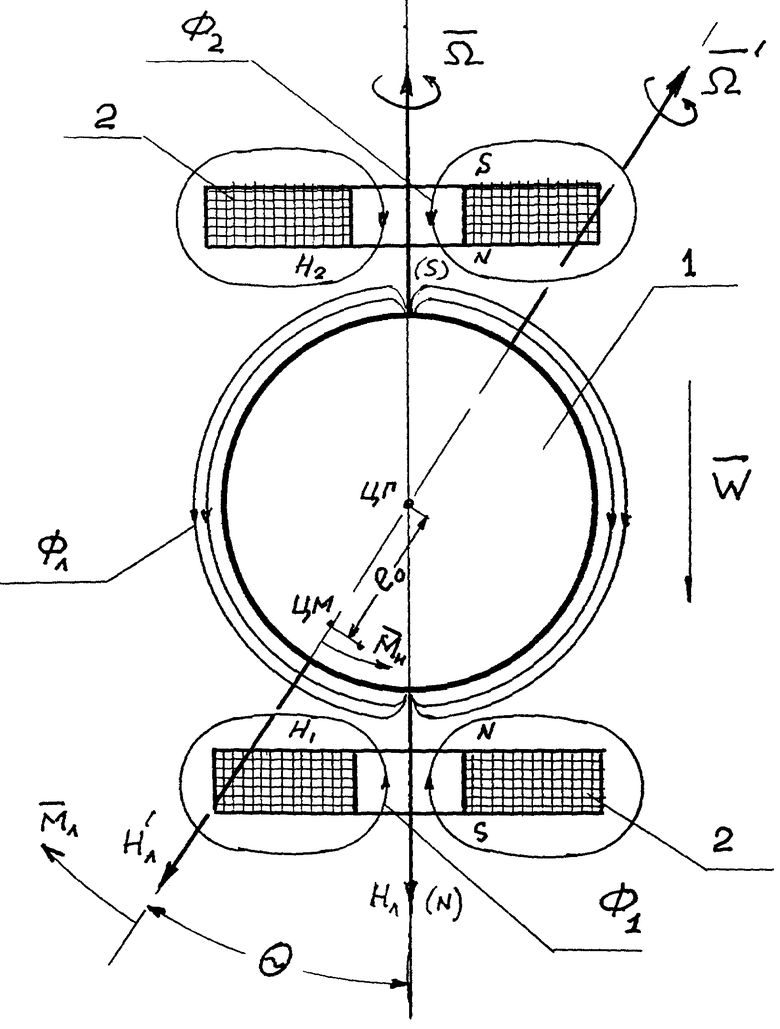
Способ регулирования сверхпроводящего гироскопа, заключающийся в ориентировании гироскопа, охлаждении его ротора и элементов магнитного подвеса до состояния сверхпроводимости, взвешивании и разгоне ротора гироскопа, изменении направления магнитного поля подвеса, измерении скорости уходов при различных ориентациях магнитного поля подвеса, отличающийся тем, что, с целью повышения точности сверхпроводящего гироскопа, устанавливают одну из осей подвеса вертикально, измерение скорости уходов осуществляют при двух взаимопротивоположных направлениях магнитного потока в нижней катушке магнитного подвеса, устанавливают направление магнитного потока в верхней и нижней катушках этой оси подвеса, соответствующее меньшему измененному уходу, изменяют скорость вращения ротора до получения минимального ухода при такой ориентации устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Левин Л.А., Жидков А.А., Малтинский М.И., ″Физические основы, элементы и устройство криогенного гироскопа | |||
| - Л.: ЦНИИ "Румб″, 1979, с.86-96 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авт.св | |||
| СССР №536703, G 01 С 19/24, 1974. | |||

