Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических шаровых гироскопов.
Известен способ приведения в рабочее состояние электростатического шарового гироскопа с нулевым датчиком угла (Технический отчет по теме "Фрегат". Предприятие ЦНИИ "Электроприбор", 1987), содержащий выполнение следующих технологических операций:
1. Установку гироскопа на платформе двухосного измерительного стенда (гиростабилизатора) в положение, при котором продольная ось корпуса гироскопа параллельна оси вращения платформы.
2. Ориентацию стенда в положение, при котором: ось вращения наружного карданового кольца платформы находится в плоскости меридиана и перпендикулярна оси вращения Земли, ось вращения внутреннего карданового кольца платформы - в плоскости горизонта, ось вращения платформы параллельна оси вращения Земли.
3. Включение системы обеспечения вакуума внутри корпуса гироскопа.
4. Контроль параметров вакуума по величине тока вакуумного насоса.
5. Взвешивание ротора в электростатическом поле подвеса при достижении заданной величины вакуума.
6. Включение системы разгона ротора.
7. Разгон ротора до рабочей скорости вращения.
8. Выключение системы разгона.
9. Включение системы депфирования угловых колебаний ротора.
10. Демпфирование угловых колебаний ротора.
11. Одновременное измерение сигналов датчика угла.
12. Выключение системы демпфирования после затухания амплитуды угловых колебаний ротора до допускаемого значения.
13. Определение равновесного положения оси вращения ротора (положения в котором суммарный момент, действующий на ротор, равен нулю), например, при включении гироскопа в качестве чувствительного элемента двухосного гиростабилизатора.
14. Измерение в течение времени не менее 50 часов выходных сигналов датчиков угла гиростабилизатора.
15. Расчет по результатам измерений координат равновесного положения оси вращения ротора.
16. Разворот корпуса в рассчитанное положение.
17. Приведение оси вращения ротора к продольной оси корпуса гироскопа.
17.1. Включение системы демпфирования.
17.2. Приведение оси ротора в определенное (равновесное) положение.
17.3. Выключение системы демпфирования.
После затухания переходного процесса, обусловленного выделением тепловой энергии, гироскоп готов к работе (находится в рабочем состоянии).
Недостатком способа является большое время готовности, указанный недостаток обусловлен необходимостью приведения оси ротора в равновесное положение.
Известен также способ приведения в рабочее состояние электростатического шарового гироскопа с датчиком угла, имеющим неограниченный диапазон измерения (Ландау Б. Е. и др. "Электростатический гироскоп со сплошным ротором для бескарданных систем навигации и ориентации". Труды конференции по теории колебаний и управлению. Московский государственный университет им. Ломоносова. Институт проблем механики РАН. 2000, 90-96], который принимаем за прототип.
Способ реализуется при выполнении следующих технологических операций:
1. Гироскоп устанавливают на платформе поворотного основания в положение, при котором, например, продольная ось корпуса гироскопа параллельна оси вращения платформы.
2. Ось вращения платформы ориентируют, например, параллельно оси вращения Земли.
3. Включают систему обеспечения вакуума внутри корпуса гироскопа.
4. Контролируют параметры вакуума по величине тока вакуумного насоса.
5. При достижении заданной величины вакуума включают питание электростатического подвеса ротора.
6. Осуществляют взвешивание ротора. При этом вследствие того, что в реальном гироскопе центр масс не совпадает с геометрическим центром и центром приложения результирующей силы электростатического подвеса, появляется момент, который действует на ротор. Под действием этого момента и при отсутствии других сдерживающих моментов ротор начинает совершать угловое движение с неограниченной амплитудой (совершать угловое вращение).
7. Включают систему разгона ротора.
8. Раскручивают ротор до рабочей скорости вращения. При разгоне вследствие несовпадения оси, по которой направлен момент вращения, с главной центральной осью инерции ротора (что всегда имеет место на практике) возникают нутационные колебания ротора.
9. Выключают систему разгона. При этом ротор будет совершать угловое движение, амплитуда которого определяется амплитудой движения, возникающего при взвешивании ротора, и амплитудой его нутационных колебаний.
10. Включают систему депфирования угловых колебаний ротора.
11. Осуществляют демпфирование колебаний.
12. Одновременно измеряют угловое положение ротора относительно корпуса (сигналы двухкоординатного датчика угла), контролируя параметры угловых колебаний.
13. После затухания амплитуды колебаний до допускаемого значения систему демпфирования выключают.
После затухания переходного процесса, обусловленного выделением тепловой энергии при демпфировании угловых колебаний оси вращения ротора, гироскоп готов к работе (находится в рабочем состоянии).
Недостатком способа является большое время готовности, указанный недостаток обусловлен необходимостью демпфирования углового движения ротора, амплитуда которого определяется амплитудой углового движения, возникающего при взвешивании ротора, и амплитудой нутационных колебаний ротора.
Задачей настоящего изобретения является уменьшение времени готовности электростатического шарового гироскопа.
Поставленная задача решается тем, что в известном способе приведения в рабочее состояние электростатического шарового гироскопа, содержащем обеспечение вакуума в корпусе гироскопа, взвешивание ротора в поле электростатического подвеса, создание момента вращения ротора, разгон ротора до рабочей скорости вращения, включение системы демпфирования угловых колебаний ротора, демпфирование угловых колебаний ротора, съем информации об угловом положении оси вращения ротора относительно корпуса, выключение системы демпфирования, взвешивание ротора в электростатическом поле подвеса осуществляют после включения системы демпфирования и создания момента вращения ротора, величину которого определяют из соотношения Мвр<Мтр, где Мвр - момент вращения ротора, Мтр - момент сил сухого трения между упорами и ротором гироскопа.
Предлагаемое изобретение поясняется чертежом. На чертеже изображена функциональная схема включения электростатического шарового гироскопа.
На чертеже приняты следующие обозначения:
1 - корпус гироскопа,
2 - система обеспечения вакуума,
3 - ротор гироскопа,
4 - упоры, ограничивающие перемещение ротора относительно электродов подвеса,
5 - электроды электростатического подвеса,
6 - система демпфирования,
7 - обмотки (катушки) системы демпфирования,
8 - система разгона,
9 - обмотки (катушки) системы разгона,
10 - система электростатического подвеса ротора,
OX - продольная ось корпуса гироскопа.
Предлагаемый способ реализуется при выполнении следующих технологических операций:
1. Гироскоп устанавливают на платформе поворотного основания (на чертеже не показано) в заданное положение, например, в положение, при котором продольная ось ОХ корпуса 1 гироскопа параллельна оси вращения платформы.
2. Ориентируют ось вращения платформы, например, по оси вращения Земли.
3. Включают систему 2 обеспечения вакуума внутри корпуса 1 гироскопа (вакуумный насос).
4. Контролируют параметры вакуума, например, по величине тока вакуумного насоса. Ротор 3 в это время лежит на упорах 4, ограничивающих возможность его контакта с электродами 5 подвеса.
5. При достижении заданной величины вакуума включают систему 6 демпфирования угловых колебаний ротора 3. При этом в обмотки 7 системы демпфирования подается ток и образуется магнитное поле, вектор напряженности которого направлен вдоль продольной оси ОХ корпуса 1 гироскопа.
6. Включают систему 8 разгона ротора 3. При этом обмотками 9 создается вращающееся магнитное поле, имеющее тангенциальную (основную) составляющую и составляющую направленную по продольной оси ОХ корпуса 1. Тангенциальная составляющая поля, взаимодействуя с магнитным полем, наводимым в роторе 3, создает момент сил, приводящих ротор 3 во вращение. При этом создаваемый системой момент вращения не должен превышать момент трения между ротором 3 и ограничительными упорами 4. При превышении ротор 3 придет в движение, и имеется вероятность механического повреждения рисунка (датчика угла), нанесенного на поверхности ротора 3.
7. Включают систему 10 электростатического подвеса ротора 3. При этом на электроды 5 подвеса подается высокое напряжение. Между электродами 5 образуется электростатическое поле. Под действием сил поля осуществляется взвешивание ротора 3. Силы трения между ротором 3 и упорами 4 исчезают. Так как в реальном гироскопе центр масс не совпадает с геометрическим центром, то под действием момента, возникающего при взвешивании, ротор 3 начинает угловое движение. Магнитное поле системы 6 (7) демпфирования и составляющая магнитного поля системы 8 (9) вращения, направленная по продольной оси, взаимодействуя с магнитным полем, наводимым в роторе 3, создают момент, который препятствует угловому движению ротора 3, возникшему при его взвешивании в электростатическом поле вследствие несовпадения геометрического центра, центра масс ротора и центра приложения результирующей подвеса. В результате вероятность возникновения углового движения при взвешивании уменьшается (исключается). Одновременно под действием тангенциальных сил системы 8 (9) разгона ротор 3 начинает вращение.
8. Разгоняют ротор 3 до рабочей скорости.
9. Выключают систему 8 разгона. При этом ротор 3 совершает угловые колебания, амплитуда которых определяется в основном амплитудой нутационных колебаний.
10. Осуществляют демпфирование угловых колебаний ротора 3.
11. Одновременно измеряют угловое положение ротора 3 относительно корпуса 1 (сигналы двухкоординатного датчика угла), контролируя параметры угловых колебаний.
12. При достижении амплитудой колебаний допускаемого значения систему 6 демпфирования выключают.
После затухания переходного процесса, обусловленного выделением тепловой энергии при демпфировании угловых колебаний оси вращения ротора, гироскоп готов к работе (находится в рабочем состоянии).
Таким образом, в результате выполнения предлагаемых технологических операций время готовности электростатического шарового гироскопа уменьшается. Время уменьшается за счет компенсации (в идеальном случае до нуля) момента возмущения, возникающего при взвешивании ротора, моментами демпфирования со стороны системы демпфирования и системы раскрутки ротора. Поставленная задача решена.
На предприятии ЦНИИ "Электроприбор" предлагаемое техническое решение реализовано. При испытаниях получены положительные результаты. Время готовности удалось уменьшить примерно в два раза. В настоящее время разрабатывается техническая документация для его применения при производстве электростатических шаровых гироскопов.
Технико-экономическая эффективность изобретения заключается в уменьшении времени готовности гироскопа, следовательно, и времени готовности систем, в которых применяются такие гироскопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2208764C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА НА УДАРНОЕ ВОЗДЕЙСТВИЕ | 2006 |
|
RU2316745C1 |
| СИСТЕМА ДЕМПФИРОВАНИЯ СФЕРИЧЕСКОГО РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2003 |
|
RU2235293C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СВЕРХПРОВОДЯЩЕГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА | 1983 |
|
SU1839929A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
Использование: при производстве и эксплуатации электростатических шаровых гироскопов. Сущность: обеспечивают вакуум в корпусе гироскопа. Взвешивают ротор в поле электростатического подвеса. Создают момент вращения ротора, разгон ротора до рабочей скорости вращения. Включают систему демпфирования угловых колебаний ротора. Демпфируют угловые колебания ротора. Снимают информацию об угловом положении оси вращения ротора относительно корпуса. При этом выключение системы демпфирования и взвешивание ротора в электростатическом поле подвеса осуществляют после включения системы демпфирования и создания момента вращения ротора, величину которого определяют из соотношения Мвр<Мтр, где Мвр - момент вращения ротора, Мтр - момент сил сухого трения между упорами и ротором гироскопа. Технический результат: уменьшение времени готовности электростатического шарового гироскопа. 1 ил.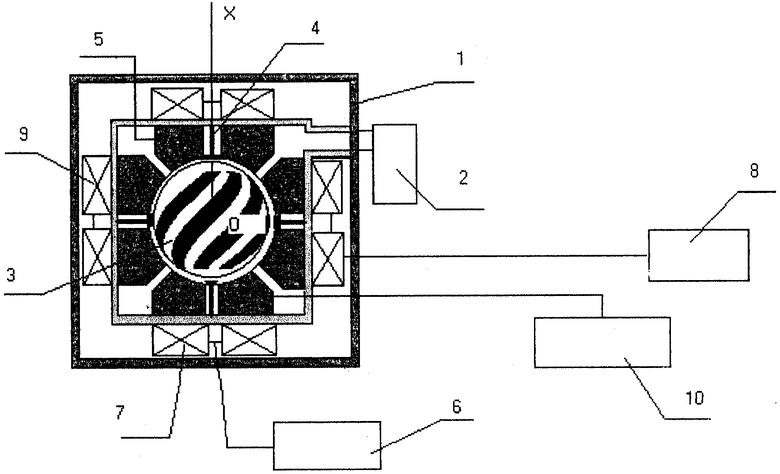
Способ приведения в рабочее состояние электростатического шарового гироскопа, включающий обеспечение вакуума в корпусе гироскопа, взвешивание ротора в поле электростатического подвеса, создание момента вращения ротора, разгон ротора до рабочей скорости вращения, включение системы демпфирования угловых колебаний ротора, демпфирование угловых колебаний ротора, съем информации об угловом положении оси вращения ротора относительно корпуса, выключение системы демпфирования, отличающийся тем, что взвешивание ротора в электростатическом поле подвеса осуществляют после включения системы демпфирования и создания момента вращения ротора, величину которого определяют из соотношения Мвр<Mтр, где Мвр - момент вращения ротора, Мтр - момент сил сухого трения между упорами и ротором гироскопа.
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| US 3847026 A, 12.11.1974 | |||
| US 5619323 A, 08.04.1997 | |||
| ИЗМЕРЕНИЕ СКОРОСТИ ПОТОКА БУРОВОГО РАСТВОРА ПРИ ПОМОЩИ ИМПУЛЬСНЫХ НЕЙТРОНОВ | 2003 |
|
RU2325522C2 |

