Предлагаемое изобретение относится к области техники первичных измерительных преобразователей физических величин в электрические сигналы. В данном случае, к датчику угловых положений (ориентации) объекта с шестью степенями свободы пространственного движения по отношению к внешнему пространству, задаваемому инерциальной, псевдоинерциальной или неинерциальной системой координат. Предлагаемый датчик может быть использован в системах пилотирования космических и летательных аппаратов различного типа и назначения, в первую очередь, для которых направление их движения не совпадает с ориентацией аппарата, в системах стабилизации и управления угловыми положениями объектов, в трехмерных системах самонаведения управляемых ракет, снарядов и других носителей.
Широко известны датчики угла и углового перемещения с одной степенью свободы (1.2.3.4), например, синусно-косинусные и линейные вращающиеся трансформаторы, фотоэлектрические датчики параллельного и накапливающего типа и другие. Известные датчики с одной степенью свободы имеют большое разнообразие конструктивного и схемотехнического оформления, а также по классам точности. Но их область применения ограничена только объектами с одной степенью свободы, они требуют механического или иного контакта с объектом.
Известны двумерные ферродинамические, электродинамические, трансформаторные, индуктивные и фотоэлектрические датчики (5, 6). Первые основаны на использовании физического явления электромагнитного взаимодействия неподвижных и подвижных элементов датчика, вторые на модуляции светового потока по двум направлениям. Области применения известных датчиков ограничены объектами с двумя степенями свободы.
Более близкими по технической сущности и назначению являются известные устройства с тремя степенями свободы на основе использования гироскопической системы из одного, двух или трех двух или трехстепенных гироскопов (7, 8).
Например, известен двухстепенной гироскоп Фуко первого рода (гирокомпас) (7, стр. 79), который обеспечивает измерение курсового угла. Двухстепенной гироскоп Фуко второго рода в сочетании с гировертикалью обеспечивает измерение географической широты (7, стр. 84, 85).
Чтобы определить ориентацию объекта по всем трем угловым положениям, требуется не менее трех гироскопов в виде гирорамы, расположенных в наружном кардановом подвесе (8, стр. 363).
Наконец, известны комбинированные инерциально-спутниковые системы определения параметров угловой ориентации шести степенных объектов, но они относятся к другой области техники радиоизмерений углов с амплитудной и фазовой модуляцией сигналов и здесь не рассматриваются.
Таким образом, все известные измерители угловых положений объектов с 6-ю степенями свободы пространственного движения используют 3 датчика по каждой координате, имеют сложное конструктивное устройство, сложные принципы функционирования и имеют другие вытекающие из этого недостатки (большие массогабариты, стоимость).
Наиболее близким по технической сущности к предлагаемому техническому решению (TP) является двумерный оптико-электронный следящий гирокоординатор (ОЭСК) оптической головки самонаведения (ОГС) одноканальной вращающейся зенитной управляемой ракеты (ВЗУР) комплексов "Стрела", "Игла", "Верба" (РФ), "Stinger POST", "Stinger RST" (США), "Мистраль" (Франция) (9).
Наиболее близкий ОЭСК содержит совмещенный с узкопольной оптической системой трехстепенной астатический гироскоп, подвешенный на внутреннем кардановом подвесе, в виде вращающегося кольцевого со сферическим внешним обводом ротора-магнита, намагниченного радиально, то есть, перпендикулярно оси вращения. Внутри ротора на внешнем обводе карданового подвеса расположена обмотка пеленга в виде полусферического соленоида, которая является датчиком ориентации ротора в системе электрического арретирования (СЭА). Вокруг ротора расположена обмотка коррекции в виде сферического соленоида, которая является исполнительным элементом задания ориентации ротора (в режиме электрического арретирования) и коррекции его ориентации (в режиме слежения за целью). Оба соленоида и втулка, на которую крепится внутренний кардановый подвес, установлены на вращающемся вместе с ракетой основании. Задание и коррекция ориентации ротора следящего гироскопа и совмещенной с ним оптической системы с угловой скоростью вращения линии визирования производятся управлением прецессионного движения ротора путем пропускания через витки сферического соленоида тока заданной величины и фазы на частоте вращения ротора гироскопа. При этом происходит силовое взаимодействие вращающегося магнитного поля ротора и переменного магнитного поля соленоида, которое разворачивает ротор с заданной скоростью, равной скорости вращения линии визирования, на заданные углы ориентации по курсу и тангажу (по крену ракета стабилизируется вращением). Перед пуском необходимо прицелиться, для чего система слежения замыкается на обмотку пеленга, и работает в режиме электрического арретирования, при этом ротор разворачивается и устанавливается вдоль продольной оси ракеты все время, пока цель не попадет в поле зрения, после чего производится перевод системы в режим слежения (по другому - автосопровожение).
Наиболее близкий гирокоординатор обеспечивает высокую точность определения угловых положений по курсу и тангажу. Однако известное устройство не является абсолютным датчиком, как предложенное, так как не позволяет определить все три угла ориентации, и его область применения поэтому ограничена, а информативность преобразования недостаточная.
Целью изобретения является повышение информативности измерительного преобразования до абсолютной по всем трем координатам, а также расширение областей применения для 6-степенных объектов с неограниченными углами рассогласования.
Указанная цель достигается тем, что в устройство, содержащее гироскоп с вращающимся ротором-магнитом, намагниченным перпендикулярно оси вращения, помещенным внутри сферического соленоида, разгонное устройство с системой стабилизации частоты вращения ротора и системой электрического арретирования, введены еще два сферических соленоида, взаимно пространственно перпендикулярные между собой и с первым соленоидом, причем все три соленоида расположены на сфере, выполненной из немагнитного материала и жестко соединенной с объектом, зафиксированным внешним кардановым подвесом, а ротор-магнит выполнен в виде полого сферического кольца, частично заполненного немагнитной жидкой средой, и помещен внутри сферы с соленоидами, а пространство между ротором и сферой с соленоидами заполнено под давлением жидким смазочным материалом с минимальным коэффициентом вязкости. Также на всех трех осях карданового подвеса на обозначенных фиксаторах введены элементы снятия фиксации, что необходимо для установки начального отсчета связанной с объектом системы координат в виде немагнитной сферы с расположенными на ней тремя взаимно перпендикулярными соленоидами относительно системы координат внешнего пространства. На сфере параллельно одной из осей соленоида жестко устанавливается прицельное устройство. Прицельное устройство необходимо для "привязки" и установки начального отсчета связанной с объектом системы координат в виде сферы с тремя соленоидами по отношению к системе координат внешнего пространства, представленной вращающимся ротором-магнитом. Установка начального отсчета производится в режиме электрического арретирования ротора, когда его ось вращения принудительно фиксируется вдоль оси прицельного устройства.
Таким образом, именно введение трех попарно биортогональных между собой сферических соленоидов и соответственно суммарно трехмерно ортогональных по объему пространства, а также выполнение ротора в виде полого сферического кольца и установка его внутри соленоидов, в сочетании с введением внешнего кольцевого карданового подвеса для жесткого крепления датчика к объекту, и элементов его расфиксации позволяет преобразовать все три угловых положения объекта, то есть истинные курс, тангаж и крен (Эйлеровы углы) в три би- и объемно ортогональных сигнала, амплитуды и фазы которых однозначно характеризуют все три угловых положения объекта, причем при любых неограниченных углах рассогласования между связанной с объектом и внешней системами координат. Совокупность этих введенных признаков ранее неизвестна в науке и технике, что говорит как о новизне, так и изобретательском уровне предложенного устройства.
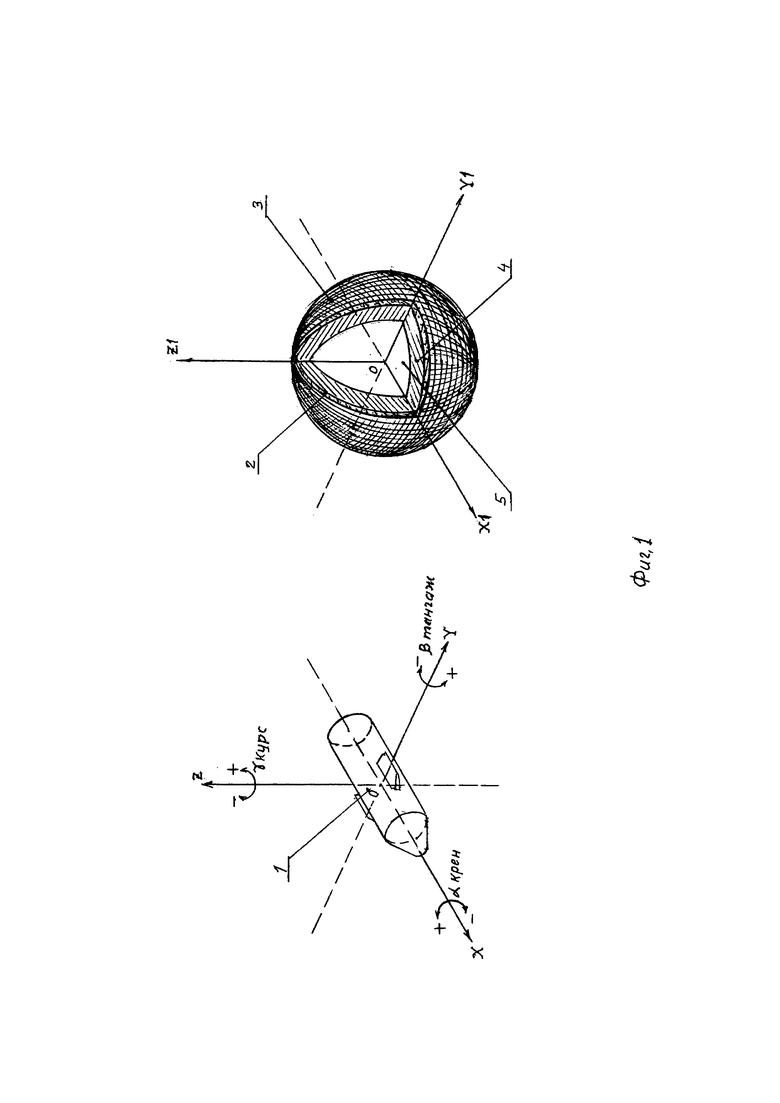
На Фиг. 1 слева представлены 6-степенной объект 1 и свзанная с ним правая декартова система координат, где О - начало координат, OX, OY, OZ - оси абсцисс, ординат и аппликат (примечание автора: чтобы упростить алгоритм выделения информативных признаков и параметров, т.е. углов, знаков углов и октантов, мной применен следующий математический прием - совмещение единичной ортонормированной декартовой системы координат, связанной с объектом, с единичной сферической системой координат, представляющей внешнее инерциальное, псевдоинерциальное или неинерциальное пространство, то есть, когда координата радиуса сферы равна единице). Справа представлен эскиз датчика, где обозначены: система координат внешнего пространства ОX1, Y1, Z1 в виде декартовой системы (она определяется по известным формулам перехода от сферической к декартовой системе), также обозначены - внешняя сфера 2 датчика из немагнитного материала, три взаимно перпендикулярных сферических соленоида 3; намагниченный перпендикулярно оси вращения полый ротор-магнит 4, внутренняя полость ротора 5, частично заполненная вязкой жидкой средой для демпфирования ударных стартовых и вибрационных полетных воздействий.
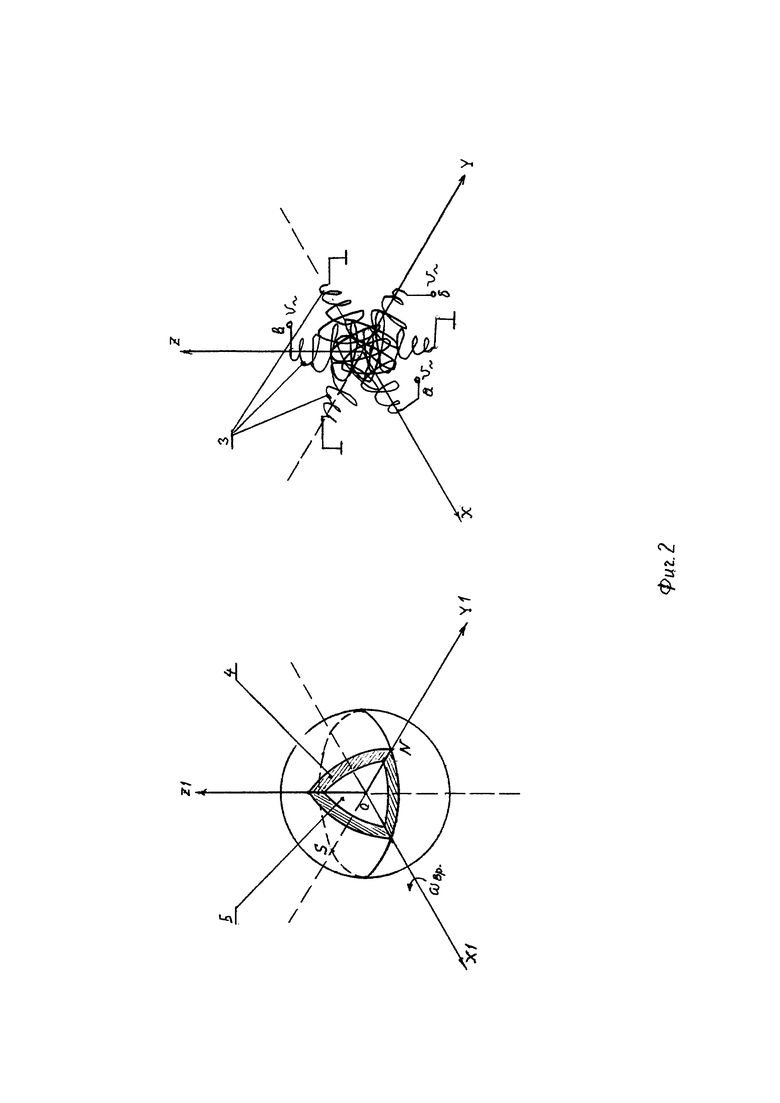
На Фиг. 2 слева представлен отдельно полый ротор-магнит 4. внутренняя полость 5 и показаны его ось вращения ОX1 и расположение его полюсов S, N. Такая радиальная ориентация намагничивания ротора при его вращении обеспечивает вихревое вращающееся магнитное поле, силовые линии которого пересекают витки сферических соленоидов и формируют эдс индукции в обмотках, пропорциональные синусу и косинусу между положительными направлениями осей ОХ и ОX1, ОY и ОY1, ОZ и ОZ1 связанной с объектом и внешней системами координат. Справа представлены в изометрической проекции обмотки а, б, в соленоидов и показаны их оси связанной с объектом системы координат.
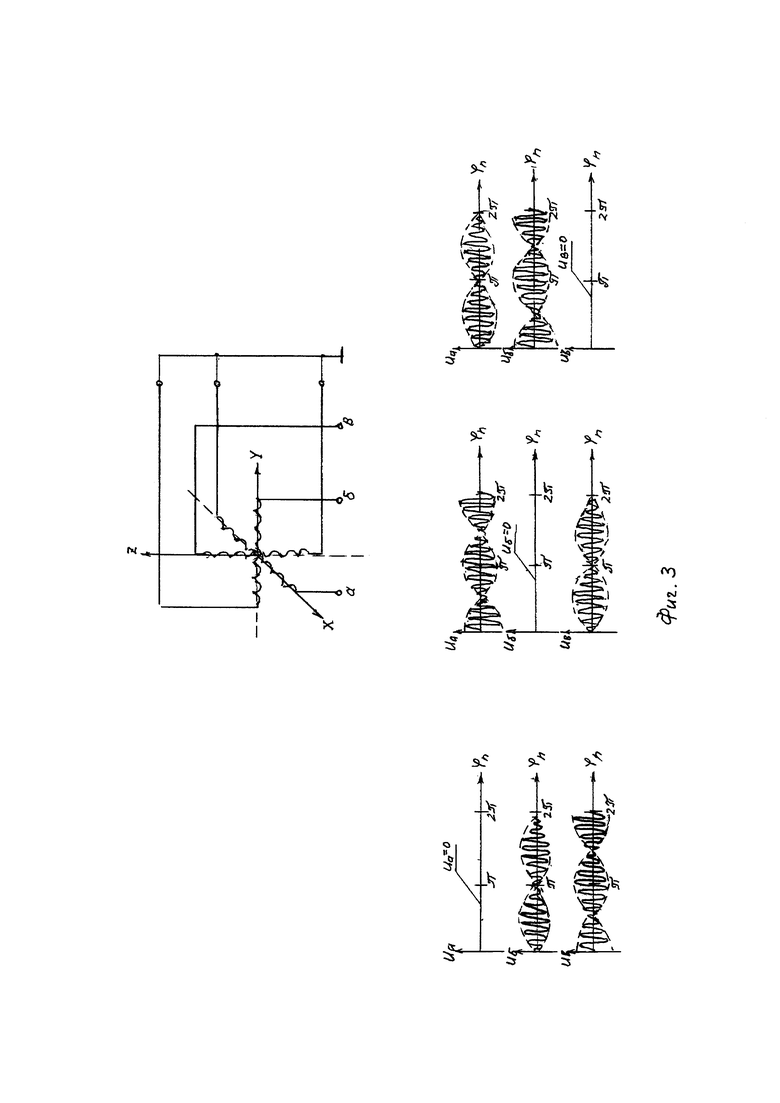
На Фиг. 3 сверху представлена электрическая схема датчика, а внизу временные диаграммы сигналов Ua, Uб и Uв с обмоток соленоидов в зависимости от угла ϕ поворота объекта в трех кординатных плоскостях в диапазоне от 0 до 2π.
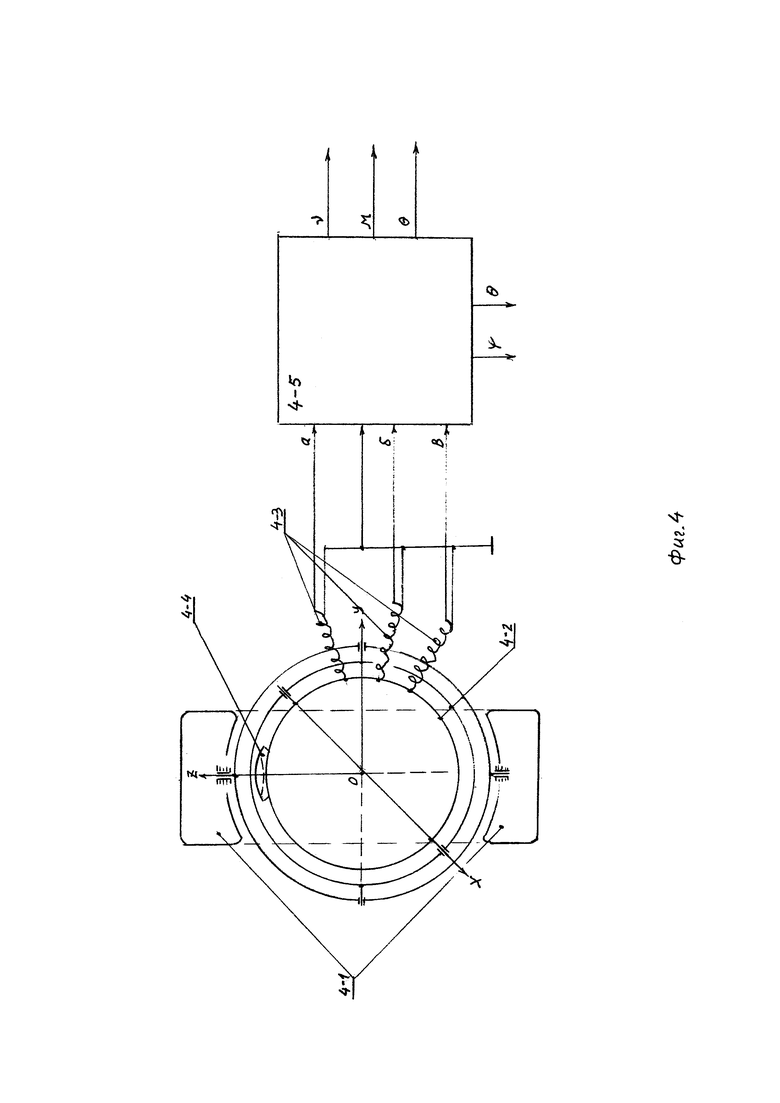
На Фиг. 4 представлена структурно-функциональная блок-схема предлагаемого гироскопического датчика. Здесь обозначены разгонное устройство 4-1, совмещенное с СЭА и системой стабилизации оборотов (ССО) ротора; внешний кардановый подвес 4-2 датчика, гибкие кабели 4-3; прицельное устройство 4-4 начальной установки; определитель 4-5 угловых положений объекта. Определитель 4-5 вычисляет углы ν, μ, θ истинных курса, тангажа и крена в декартовой системе и экваториальный и азимутальные углы ϕ, θ в единичной сферической системе координат, которые далее поступают для использования в систему пилотирования (автопилот) бортового контроллера объекта. Чтобы не загружать блок-схему вспомогательными элементами, фиксаторы карданового подвеса на Фиг. 4 не показаны, они могут быть выполнены, например, в виде трех стопорных винтов на втулках колец подвеса.
Датчик угловых положений 6-степенного объекта, представленный на Фиг. 4, работает следующим образом. Вначале ослабляются винты фиксаторов, включают разгонное устройство в режиме электрического арретирования, и когда ротор наберет штатные обороты, его частоту вращения будет поддерживать ССО. Затем производят установку начального отсчета координат, например, нацеливая датчик на полярную звезду, если используется инерциальная система координат. Затем винты фиксаторов закручивают и стопорят, после чего датчик готов к работе. Если датчик используется в одноразовом объекте кратковременного функционирования, например, зенитной ракете, уходом оси гироскопа можно пренебречь. Если же он будет использован в аппарате долговременного функционирования, должна быть предусмотрена система слежения за звездой, солнцем или другим объектом начального отсчета для коррекции ухода оси ротора гироскопа (в первичных материалах этот вариант не рассматривается, это тема отдельной заявки). Алгоритм обработки сигналов а, б, в для выделения из них информативных признаков и параметров не приводится, он остается моим "ноу-хау". Тем более что все теоретические основы в геометрической и аналитической форме представлены в материалах моей параллельной заявки "Способ автономного определения угловых положений объекта с шестью степенями свободы пространственного движения."
В настоящее время известны магнитные и немагнитные материалы с необходимыми для реализации предложенного датчика свойствами. Намотка прецезионных сферических соленоидов освоена на ОАО ЛОМО, Спб для ОЭСК "Иглы" и "Вербы". Единственную трудность составит освоение технологии изготовления полого ротора из магнитного материала с последующей обработкой его поверхности для получения минимального коэффициента трения и максимальной износостойкости, для этого можно применить поверхностную закалку на основе скин эффекта. Балансировки ротора не потребуется, так как при неполной заливке внутренней полости демпфирующей жидкой средой при вращении за счет влияния центробежных сил ротор будет самобалансироваться. Также известные современные смазочные материалы позволяют добиться минимального трения между внешней сферой и ротором, что важно для минимизации ухода заданной начальной ориентации оси ротора гироскопа. Таким образом, предложенное TP удовлетворяет критерию промышленной применимости.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Д.Э. Брускин и др. "Электрические машины", Т.2. М.: Высшая школа, 1987, стр. 32-40.
2. М.В. Баканов и др. "Информационные микромашины следящих и счетно-решающих узлов". М.: Сов. радио, 1977.
3. Э.И. Осиновский и др, "Высокоточные преобразователи угловых перемещений". М.: Энергоатомиздат, 1986.
4. Л.Н. Преснухин "Фотоэлектрические преобразователи информации". М.: Машиностроение, 1986.
5. Е.М. Карпов "Измерительные преобразователи с двумя степенями свободы". М.: Энергия, 1972.
6. А.с. СССР 1777090, 1810857.
7. М.А. Павловский "Теория гироскопов". М.: Высшая школа, 1986, стр. 79, 84, 85.
8. Д.С. Пельпор. "Гироскопические системы". М.: Высшая школа, 1986, стр. 363; В.Я. Распопов "Технические системы для измерения угловых координат", Авиакосмическое прборостроение, 2004, №3, стр. 6-10; Патент РФ 2014563.
9. Техническое описание изделия 9Э410 (ОГС "Игла") комплекса ПЗРК 9К38М, Оборонгиз, 1980; Патент РФ 2101724, Патенты США 4009393, 4339097; Патент Франции 1501166.
Пп. 5, 6, 7, 8 - аналоги; п. 9 - прототип.
Использование: для первичных измерительных преобразователей (датчиков) угловых положений объектов с шестью степенями свободы пространственного движения. Сущность изобретения заключается в том, что гироскопический датчик угловых положений объекта с шестью степенями свободы содержит гироскоп с вращающимся ротором-магнитом, намагниченным перпендикулярно оси вращения, помещенный внутри сферического соленоида и разгонного устройства, снабженного системами электрического арретирования и стабилизации частоты вращения ротора, при этом дополнительно введены еще два сферических соленоида, расположенных попарно биортогонально с первым соленоидом и между собой, а вместе трехмерно ортогонально, все три соленоида расположены на сфере, выполненной из немагнитного материала и жестко соединенной с объектом зафиксированным внешним кардановым подвесом, а ротор-магнит выполнен в форме полого сферического шара, частично заполненного немагнитной демпфирующей жидкой средой, а зазор между ротором и сферой с соленоидами заполнен жидкой смазкой, на сфере параллельно оси сферического соленоида начального отсчета расположено прицельное устройство, а на втулках карданового подвеса установлены элементы снятия фиксации. Технический результат: обеспечение возможности повышения информативности, упрощения, снижения массогабаритов и расширения областей применения. 4 ил.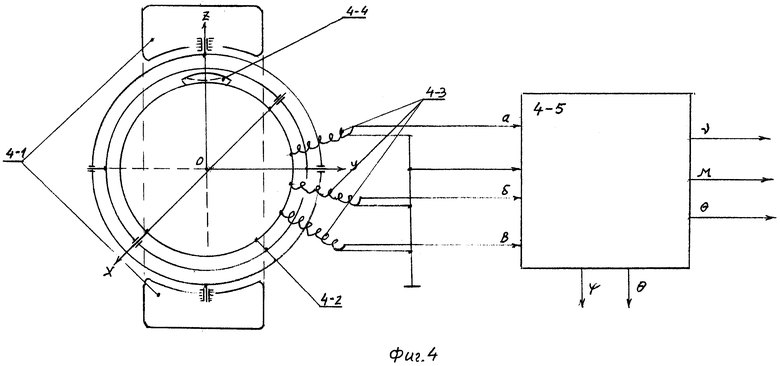
Гироскопический датчик угловых положений объекта с шестью степенями свободы, содержащий гироскоп с вращающимся ротором-магнитом, намагниченным перпендикулярно оси вращения, помещенный внутри сферического соленоида и разгонного устройства, снабженного системами электрического арретирования и стабилизации частоты вращения ротора, отличающийся тем, что введены еще два сферических соленоида, расположенных попарно биортогонально с первым соленоидом и между собой, а вместе трехмерно ортогонально, все три соленоида расположены на сфере, выполненной из немагнитного материала и жестко соединенной с объектом зафиксированным внешним кардановым подвесом, а ротор-магнит выполнен в форме полого сферического шара, частично заполненного немагнитной демпфирующей жидкой средой, а зазор между ротором и сферой с соленоидами заполнен жидкой смазкой, на сфере параллельно оси сферического соленоида начального отсчета расположено прицельное устройство, а на втулках карданового подвеса установлены элементы снятия фиксации.
| ТРЕХОСНЫЙ ГИРОМОТОР | 2004 |
|
RU2275601C1 |
| 0 |
|
SU155046A1 | |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОСИ РОТОРА | 2013 |
|
RU2531060C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |

