Изобретение относится к области прецизионного приборостроения и может быть использовано в криогенных гироскопических устройствах, предназначенных для инерциальных навигационных систем и систем управления движущимися объектами.
Известен способ настройки гироскопического устройства с электростатическим подвесом сферического ротора (см. П.È.Малеев. Новые типы гироскопов. Л.: Судостроение, 1971, с.19-27), содержащий взвешивание ротора в электростатическом подвесе, разгон ротора, настроечные операции в виде регулирования системы взвешивания и измерения скорости уходов гироскопа.
Такой способ обладает существенным недостатком, так как для получения малой скорости уходов требуется обеспечение высокой точности сферической формы ротора. Отклонение формы ротора от сферической, обусловленное, например, действием центробежных сил при его вращении, является источником возмущающих моментов, которые вызывают прецессионное движение ротора в инерциальном пространстве. При этом наиболее значительные возмущающие моменты возникают при наличии угла рассогласования между осью вращения ротора и осью подвеса, т.е. при использовании гироскопа в качестве чувствительного элемента бескарданных навигационных систем.
Известен также способ настройки гироскопического устройства с магнитным сверхпроводящим подвесом сферического ротора (см. П.И.Малеев. Новые типы гироскопов. Л.: Судостроение, 1971, с.46-66), содержащий охлаждение устройства до сверхпроводящего состояния, взвешивание ротора в магнитном сверхпроводящем подвесе, разгон ротора, регулирование системы взвешивания ротора и измерение уходов гироскопа.
Такой способ для получения малой скорости уходов гироскопа также требует обеспечения сферической формы ротора с высокой точностью, так как воздействие магнитных сил подвеса на ротор, имеющий отклонения от сферы, вызывает появление возмущающих моментов.
Из известных способов наиболее близкий по технической сущности является способ настройки криогенного гироскопического устройства (авторское свидетельство №503430 по кл. G01С, 19/00), содержащий взвешивание ротора во вспомогательном электростатическом подвесе, сообщение ротору угловой скорости, охлаждение устройства до сверхпроводящего состояния, взвешивание ротора в сверхпроводящем магнитном подвесе и отключение вспомогательного подвеса, регулирование системы взвешивания ротора и измерение скорости уходов гироскопа.
Указанный способ не обеспечивает высокой точности криогенного гироскопического устройства, так как воздействие на ротор только магнитных сил подвеса является источником возмущающих моментов, если форма ротора имеет отклонения от идеальной сферы.
Целью настоящего изобретения является повышение точности гироскопического устройства с магнитным сверхпроводящим подвесом и вспомогательным электростатическим подвесом.
Указанная цель достигается тем, что после взвешивания ротора во вспомогательном электростатическом подвесе, сообщения ротору угловой скорости, охлаждения устройства до сверхпроводящего состояния, взвешивания ротора в сверхпроводящем магнитном подвесе, регулирование системы взвешивания ротора осуществляют при включенном вспомогательном электростатическом подвесе до установления коэффициентов Кe и Кm усиления электростатического и магнитного подвесов в соотношении

а опорных напряженностей Еo и Но электростатического и магнитного подвесов - в соотношении

где μo, εo - магнитная и электрическая постоянные.
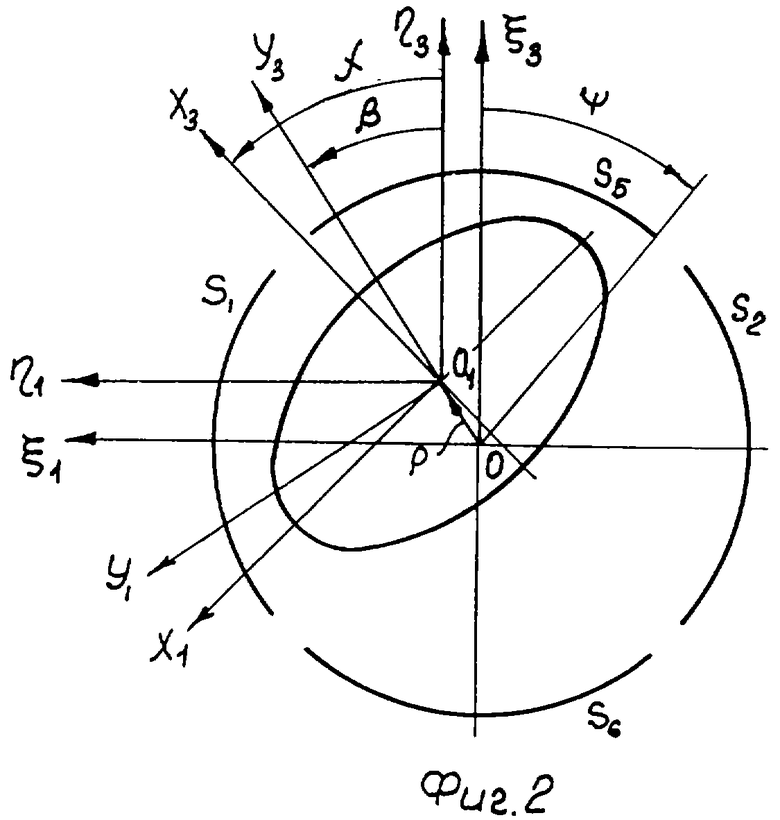
Сущность изобретения поясняется чертежами, где на фиг.1 представлен пример гироскопического устройства, с помощью которого может быть реализован предлагаемый способ, на фиг.2 изображена упрощенная схема формирующих экранов-электродов устройства и системы координат с учетом углов отклонения и смещения ротора в подвесе.
Условные обозначения, принятые на чертежах:
1 - ротор сферический, выполненный из сверхпроводящего материала, например, ниобия;
2 - рабочий зазор подвеса;
3 - сверхпроводящие экраны, с помощью которых в рабочем зазоре 2 формируются магнитное к электрическое поля;
4 - силовые линии магнитного поля;
5 - силовые линии электрического поля;
6 - катушки возбуждения магнитного поля подвеса;
7 - измеритель положения ротора между экранами 3, основанный, например, на измерении изменений емкости между ротором 1 и экранами 3 при смещениях ротора относительно центра подвеса 0;
8, 9 - регуляторы коэффициентов усиления магнитного и электростатического подвесов;
10, 11 - преобразователи, управляющие соответственно токами в катушках 6 и электрическими потенциалами экранов 3;
12, 13 - регуляторы опорного значения тока в катушках 6 и опорного потенциала на экранах 3 соответственно;
0ξ1ξ2ξ3 - неподвижная система координат с началом в центре 0 подвеса и осями, направленными по осям симметрии экранов S1, S2, S5, S6;
01η1η2η3 - система координат с началом в центре масс 0, ротора, оси которой параллельны осям системы координат 0ξ1ξ2ξ3;
ρ - вектор, характеризующий смещение центра масс 01 относительно центра 0 подвеса;
01Х1Х2Х3 - система координат, связанная с ротором и осью 0Х3, направленной по его оси вращения;
01Y1Y2Y3 - система координат с началом в центре 01, ось 0Y3 которой направлена вдоль вектора ρ;
χ - угол отклонения оси 0Х3 относительно оси 0η3;
β - угол, характеризующий направление смещения ротора;
ψ - угол, определяющий размеры экранов S1, S2, S5, S6.
Оси 0ξ2, 01η2, 01X2, 01Y2 перпендикулярны плоскости чертежа.
На фиг.1 показан только вертикальный канал подвеса гироскопического устройства. Взвешивание и центрирование ротора в трехкоординатном подвесе может быть осуществлено с помощью трех аналогичных каналов.
Предлагаемый способ настройки криогенного гироскопического устройства содержит следующие операции.
1. Взвешивание ротора во вспомогательном электростатическом подвесе. При подаче питания на устройство положение ротора относительно экранов 3 регистрируется измерителем 7, сигнал с которого через регулятор 9 поступает на преобразователь 11 и далее в виде высокого электрического потенциала - на верхний экран 3. Под действием электростатических сил, работающих на притяжение, ротор взвешивается и в дальнейшем сохраняет взвешенное состояние за счет автоматического управления потенциалами верхнего и нижнего экранов 3 с помощью системы, включающей измеритель 7, регулятор 9 и преобразователь 11. При смещении ротора вниз, например, под действием ускорений, увеличивается потенциал верхнего экрана, т.е. увеличивается напряженность электрического поля в рабочем зазоре, а, следовательно, и сила притяжения ротора к верхнему экрану, под действием которой ротор остается в положении, близком к центральному. Электрический потенциал нижнего экрана 3 при этом уменьшается. При отсутствии действующего ускорения, в том числе и ускорения силы тяжести, ротор занимает центральное положение, а потенциалы экранов одинаковы и принимают значение, равное опорному, например, половине потенциала, определяющего электрический пробой рабочего зазора.
2. Сообщение ротору угловой скорости. Вращение ротору может быть сообщено с помощью разгонного устройства, например, асинхронного двигателя, включаемого после взвешивания ротора в электростатическом подвесе (на фиг.1 разгонное устройство не показано).
3. Охлаждение устройства до температуры, при которой его сверхпроводящие элементы переходят в сверхпроводящее состояние.
4. Взвешивание ротора в сверхпроводящем магнитном подвесе. Взвешивание ротора в сверхпроводящем магнитной подвесе осуществляется с помощью системы, включающей измеритель 7, регулятор 8 и преобразователь 10, который управляет величиной токов в катушках 6. При смещениях ротора, например, вниз, система магнитного взвешивания увеличивает ток в нижней катушке подвеса, т.е. увеличивает напряженность магнитного поля в нижнем рабочей зазоре, а, следовательно, и силу диамагнитного отталкивания, под действием которой ротор сохраняет положение, близкое к центральному. Ток в верхней катушке и напряженность магнитного поля в верхнем рабочем зазоре в этом случае уменьшается. При отсутствии действующего ускорения, в том числе и ускорения силы тяжести, токи в катушках подвеса равны, а напряженности магнитного поля в рабочих зазорах подвеса имеют значение, равное опорному, например, половине критического поля для сверхпроводящего материала ротора 1 и экранов 3.
5. Регулирование системы взвешивания и измерение уходов ротора гироскопического устройства. Регулирование системы взвешивания ротора включает установление коэффициентов усиления Кe и Кm электростатического и магнитного подвесов в соотношении (1), а опорных напряженностей Еo и Hо электростатического и магнитного полей в рабочем зазоре подвеса - в соотношении (2).
Соотношения (1) и (2) обеспечивают взаимную компенсацию возмущающих моментов, прикладываемых к ротору со стороны электростатического и магнитного подвесов, и обеспечивают снижение скорости уходов ротора, т.е. повышение точности гироскопического устройства.
Сущность физических явлений, поясняющих возможность снижения возмущающего момента, действующего на ротор при наличии отклонений его формы от сферической, состоит в том, что при совместной работе магнитного сверхпроводящего и электростатического подвесов силы диамагнитного отталкивания сверхпроводящего подвеса и силы притяжения электростатического подвеса прикладывается к одним и тем же точкам ротора, направлены по нормали к поверхности ротора и имеют противоположные знаки, причем плотность указанных сил может быть выполнена одинаковой. Необходимо подчеркнуть, что, несмотря на различную физическую природу пондеромоторных сил, действующих на ротор при совместной работе электростатического и сверхпроводящего магнитного подвеса (силы электростатические притягивают ротор к формирующему экрану, а силы диамагнитного взаимодействия отталкивают) подъемные силы обоих подвесов суммируются.
Возмущающие моменты, обусловленные несферичностью ротора как в электростатическом подвесе, так и в магнитном, рассмотрены в ряде работ, например:
1. В.Г.Мартыненко. Уходы электростатического гироскопа, вызываемые несферичностью ротора. Изв. АН СССР. Механика твердого тела, 1970, №1, с.10-18.
2. Ю.М.Урман. Уводящие моменты, вызываемые несферичностью ротора, в подвесе с аксиально-симметричным полем. Изв. АН СССР. Механика твердого тела, 1973, №1, с.24-31.
Так как силы подвеса нормальны к внешней поверхности ротора, то возмущающий момент, действующий на ротор, можно найти, используя выражение

где f - плотность сил, прикладываемых к элементу dS поверхности ротора S;
r - радиус-вектор, проведенный из центра масс к точкам поверхности S;
n - вектор нормали к поверхности S.
Если поверхность ротора имеет идеальную сферическую форму, то силы, действующие со стороны магнитного и электростатического подвесов, проходят через центр масс ротора и возмущающих моментов не возникнет.
Для оценки моментов, обусловленных несферичностью ротора, рассмотрим упрощенную модель подвеса (фиг.2). Будем полагать, что взвешиваемое тело имеет форму плоского диска толщиной h, а подвес образован системой четырех сверхпроводящих экранов - электродов S1, S2, S5, S6, формирующих в рабочем зазоре магнитное и электрическое поля соответственно с напряженностью Н и Е. Положение системы координат 01Хi (=1, 2, 3), связанной с центром масс 01 ротора по отношению к неподвижной системе координат 0ξi определяется углом χ и смещением ρ центра 01 относительно центра 0 подвеса; направление оси 01Y3, совмещенной с вектором ρ, определяется углом β, а оси 01ηi параллельны осям 0ξi. Введем также систему полярных координат (r, υ), (r, υ1) и r, θ с полярными осями 01X3, 01Y3, 01η3 соответственно. Тогда определение интеграла по поверхности ротора в выражении (3) заменяется вычислением интеграла по длине дуги l, а возмущающие моменты всегда направлены по оси Х2:

Рассмотрим возмущающие моменты, обусловленные, например, малой эллипсоидальностью взвешиваемого тела. В этом случае управление его рабочей поверхности может быть представлено в следующем виде:

где ν2 - малый параметр; ro - средний радиус ротора;
P2(cosϑ) - полином Лежандра

Уравнение (5) описывает деформированную центробежными силами форму ротора. В общем виде плотности сил fе и fm, создаваемых на поверхности ротора магнитным и электрическим полями, определяются выражениями

где Е, Н - напряженности электрического и магнитного полей;
εо μо - электрическая и магнитная постоянные.
В рассматриваемом случае выражения (7) принимают вид:

где Е=u/δo,  ;
;
Е, H - кусочно-постоянные функции, принимающие значения Eк=const, Hк=const под каждым к-тым формирующим экраном;
δо - зазор между поверхностью взвешиваемого тела и экранами при ρ=о, ν2=о; u - потенциал экрана.
Плотность момента, прикладываемого к ротору электрическим и магнитным подвесом, относительно оси X2 определяется выражением:

где  .
.
Используя соотношения cosθ1=cos(θ-β), sinϑ=sin(θ-χ),
а также учитывая, что при малых относительных смещениях  имеет место разложение
имеет место разложение

(9) можно представить в виде:

где  - разность между наибольшей и наименьшей полуосями, характеризующая эллипсоидальность взвешиваемого тела.
- разность между наибольшей и наименьшей полуосями, характеризующая эллипсоидальность взвешиваемого тела.
Учитывая (4), (6) и (11), получим формулу для уводящего момента, обусловленного действием сил со стороны к-ого экрана:

Пределы интегрирования в выражении (12) определяются углом (фиг.2):

Система взвешивания управляет напряженностями электрического и магнитного полей в рабочем зазоре таким образом, чтобы при смещениях взвешиваемого тела была обеспечена устойчивая работа как электростатического, так и магнитного полей:

i=1,3 - порядковый номер оси подвеса;
ρξ1=ρosinβ, ρξ3=ρocosβ - проекции смещения на оси подвеса;
Кe, Кm - коэффициенты усиления следящих систем электрического и магнитного подвесов;
Еo, Hо - опорные значения напряженностей электрического и магнитного полей.
Выполнив интегрирование в соответствии с (12) и просуммировав моменты от действия сил со стороны всех формирующих экранов, получим следующее выражение для возмущающего момента:
M=M'+M''+M'''
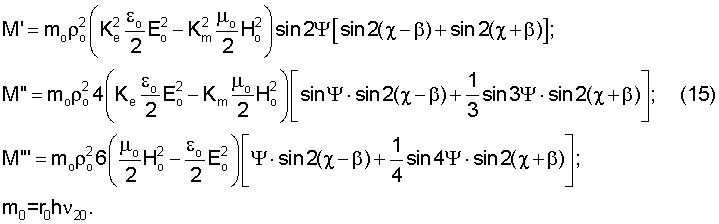
Выражение (15) показывает, что возмущающий момент пропорционален несферичности ν2о ротора и квадрату смещения ρо ротора относительно центра подвеса и определяется параметрами как магнитного, так и электрического подвесов. Кроме того, момент, действующий на ротор в управляемом магнитном подвесе (Е0=0, Ке=0) носит характер второй гармоники, причем наибольший вес имеет составляющая М' момента, содержащая квадрат коэффициента усиления  , который в нормально функционирующем подвесе имеет порядок 102. Указанная составляющая имеет место при угловых отклонениях χ вектора кинетического момента от оси электрода, т.е. при использовании гироскопического устройства в бескарданных навигационных системах. Введение электростатических сил в подвесе дает возможность полностью ликвидировать составляющую М' момента, если параметры электростатического и магнитного подвесов удовлетворяют равенству:
, который в нормально функционирующем подвесе имеет порядок 102. Указанная составляющая имеет место при угловых отклонениях χ вектора кинетического момента от оси электрода, т.е. при использовании гироскопического устройства в бескарданных навигационных системах. Введение электростатических сил в подвесе дает возможность полностью ликвидировать составляющую М' момента, если параметры электростатического и магнитного подвесов удовлетворяют равенству:
откуда следует соотношение (1):
Второе соотношение вытекает из условия обеспечения равенства нулю составляющей М'' момента (15):
откуда можно получить:

Таким образом, совместное применение магнитного сверхпроводящего и электростатического подвесов позволяет воздействовать на моментные характеристики подвеса и снизить уровень возмущающего момента до значения, определяемого составляющей М'', т.е. повысить точность гироскопического устройства.
Оценка показывает, что при выполнении соотношений (1) и (2) принципиальных затруднений не возникает. Например, при значениях опорных напряженностей Но=0,5, Hк=1,12·105 А/м и Eo=0,5, Eк=1.107 В/м, где Нк - критическое значение магнитного поля для ниобия, Ек - пробивная напряженность электрического поля, отношение коэффициентов усиления Ке и Кm (при μо=4π·10-7 г/м, εо=8,85·10-12 Ф/м) составляет 
Таким образом, повышение точности криогенного гироскопического устройства достигается за счет регулировки системы взвешивания ротора при включенном электростатическом подвесе и установления в процессе настройки соотношения (1) и (2) между параметрами электростатического и магнитного сверхпроводящего подвесов, в отличие от известного технического решения, где после окончания разгона ротора вспомогательный электростатический подвес отключают и дальнейшая работа устройства осуществляется только с использованием сверхпроводящего магнитного подвеса.
Технико-экономическая эффективность предлагаемого изобретения заключается в повышении точности и надежности гироскопических устройств, а, следовательно, и в повышении точности и надежности навигационных систем, в которых они применяются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Криогенный гироскоп | 2016 |
|
RU2643942C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СВЕРХПРОВОДЯЩЕГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА | 1983 |
|
SU1839929A1 |
| Способ изготовления чувствительного элемента криогенного гироскопа | 2017 |
|
RU2678707C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2008 |
|
RU2386109C1 |
| КРИОГЕННЫЙ ГИРОСКОП | 1992 |
|
RU2011166C1 |
| КРИОГЕННЫЙ ФЕРРОМАГНИТНЫЙ ГИРОСКОП | 1992 |
|
RU2084825C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ПОДВЕС СФЕРИЧЕСКОГО РОТОРА | 1972 |
|
SU360548A1 |
| Способ управления подвесом ротора электростатического гироскопа | 2016 |
|
RU2626572C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЗАЗОРА В БЕЗПОДШИПНИКОВОМ КОЛЕСЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662359C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано в криогенных гироскопических устройствах. Сущность: способ включает взвешивание ротора в электростатическом подвесе, сообщение ротору угловой скорости, охлаждение устройства до сверхпроводящего состояния, взвешивание ротора в сверхпроводящем магнитном подвесе и измерение скорости уходов криогенного гироскопа. Взвешивание ротора криогенного гироскопа в сверхпроводящем магнитном подвесе осуществляют при включенном электростатическом подвесе. При этом выполняется следующее условие:  где Кe, Кm - коэффициенты усиления электростатического и магнитного подвесов, Еo, Но - опорные значения напряженностей электрического и магнитного полей в рабочем зазоре подвеса, μo, εo - магнитная и электрическая постоянные. Технический результат: повышение точности настройки криогенного гироскопа путем уменьшения уровня возмущающих моментов. 2 ил.
где Кe, Кm - коэффициенты усиления электростатического и магнитного подвесов, Еo, Но - опорные значения напряженностей электрического и магнитного полей в рабочем зазоре подвеса, μo, εo - магнитная и электрическая постоянные. Технический результат: повышение точности настройки криогенного гироскопа путем уменьшения уровня возмущающих моментов. 2 ил.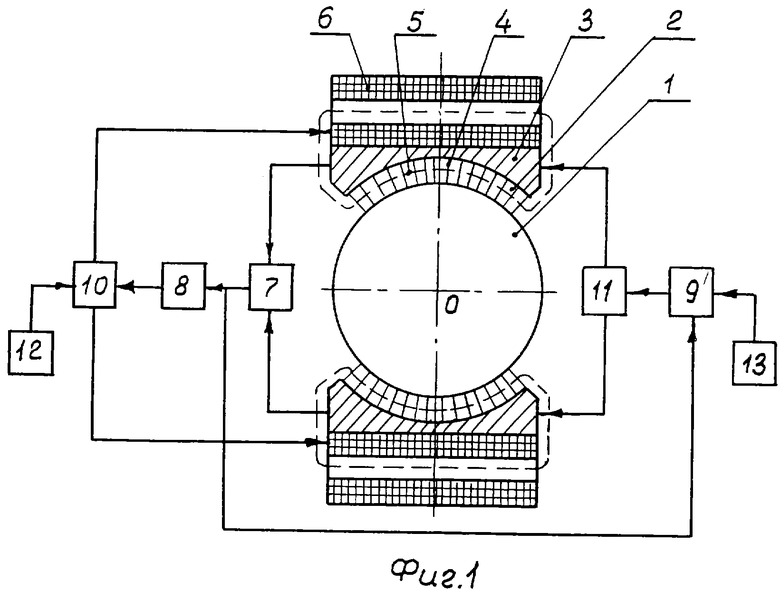
Способ настройки криогенного гироскопа, включающий взвешивание ротора в электростатическом подвесе, сообщение ротору угловой скорости, охлаждение устройства до сверхпроводящего состояния, взвешивание ротора в сверхпроводящем магнитном подвесе и измерение скорости уходов криогенного гироскопа, отличающийся тем, что, с целью повышения точности настройки криогенного гироскопа путем уменьшения уровня возмущающих моментов, взвешивание ротора криогенного гироскопа в сверхпроводящем магнитном подвесе осуществляют при включенном электростатическом подвесе, при этом выполняется следующее условие:
где Кe, Кm - коэффициенты усиления электростатического и магнитного подвесов;
Еo, Но - опорные значения напряженностей электрического и магнитного полей в рабочем зазоре подвеса;
μo, εo - магнитная и электрическая постоянные.
| П.И.Малеев | |||
| Новые типы гироскопов, Л.: Судостроение, 1971, стр.46-66 | |||
| А.с | |||
| СССР, №503430, G01C 19/00, 1974. |

