Предлагаемое устройство относится к области электротехники и касается известных [1] маховиковых систем, предназначенных для управления движением космических аппаратов (КА) относительно центра масс. Под маховиковой системой понимается устройство, состоящее из электродвигателей-маховиков (ЭДМ) и блоков управления этими ЭДМ. Электродвигатели-маховики располагаются по осям стабилизации КА и вырабатывают управляющие динамические моменты, величина которых регулируется, например, пропорционально сигналу управления. В данном случае по двум из осей КА, например, Х и У располагаются, как обычно, по одному ЭДМ, а по третьей оси расположены два ЭДМ со встречным направлением векторов кинетического момента Нz1 и Hz2. Система из двух ЭДМ названа здесь спаркой. В исходном состоянии Нz1=Hz2>0, т.е. результирующий вектор кинетического момента Нz=Hz1-Нz2=0. Следовательно, в составе маховиковой системы спарка выступит как один маховик, но в отличие от него имеет в исходном состоянии запас кинетической энергии.
Известна маховиковая система, основанная на обмене кинетической энергией, предложенная в [2] на стр.90, которая взята в данной заявке в качестве прототипа. В прототипе предлагается управлять двигателями-маховиками посредством передачи вращения от одного ЭДМ к другому с помощью механической системы, состоящей из роликов и кареток. Общие признаки прототипа и предлагаемого устройства состоят в том, что: 1) движение маховиков взаимосвязаны, вследствие чего вращение, а следовательно, мощность и энергия передаются от одного маховика к другому, минуя источник питания; 2) взаимосвязь между маховиками управляема. В прототипе это управление осуществляется посредством изменения координат расположения каретки относительно маховиков по сигналу управления. Положительный эффект, свойственный как прототипу, так и предлагаемому устройству состоит в уменьшении максимального значения потребляемой мощности. Однако прототип имеет существенные недостатки: 1) механическая связь между маховиками посредством роликов и кареток громоздка и ненадежна; 2) имеется паразитный импульс вращающего момента относительно оси ролика; 3) используется только 1/2√2 полной емкости количества движения пары маховиков; 4) дополнительный расход мощности и сокращение срока службы из-за трения роликов о маховики. Из-за этих недостатков прототип не получил распространения в практических конструкциях.
В настоящее время распространен способ раздельного регулирования момента ЭДМ маховиковых систем путем воздействия на якорную [3] цепь двигателя.
При этом способе каждый ЭДМ регулируется автономно, независимо от других ЭДМ, входящих в маховиковую систему. Основной недостаток раздельного способа управления состоит в том, что он сопровождается большими пиками потребляемой мощности и ее потерями. В процессе работы скорость ЭДМ Ω непрерывно изменяется между крайними значениями - Ωм и + Ωм; изменение ее от ± Ω до 0 соответствует режиму торможения, а изменение от 0 до ± Ω - двигательному режиму. Разгон ЭДМ в двигательном режиме сопровождается возрастанием механической мощности на валу двигателя Pмех=Mэм Ω и, следовательно, - увеличением потребляемой электрической мощности Pэл=Рмех/η. В этих формулах Мэм=Мд+Мс - электромагнитный, Мд - динамический моменты, Мс - момент сопротивления вращению маховика. При Ω=0 величина Рэл также близка к нулю, а при Ω= Ωм достигает пикового значения. Для снижения веса маховика величину Ωм стремятся в максимальной мере увеличить, но допустимая мощность автономного источника питания препятствует возрастанию пикового значения мощности, а следовательно, препятствует увеличению скорости Ωм. Возникает непреодолимое обычными методами противоречие: для снижения веса скорость маховика нужно увеличивать, а ограниченная установленная мощность бортового источника питания не позволяет сделать этого. Компромиссное разрешение этого противоречия выражается в сравнительно низких скоростях современных ЭДМ: 200-5000 об/м.
Режим торможения маховика может быть осуществлен, например, с помощью рекуперативного торможения двигателя, которое характеризуется отдачей энергии в источник и на первый взгляд кажется выгодным. В действительности для современных источников тока - химической батареи в сочетании с солнечной батареей - подзаряд от ЭДМ - это крайне нежелательный режим, а в ряде случаев вообще невозможный, например, в тех случаях, когда после химической батареи имеется стабилизатор напряжения. Поэтому в режиме торможения накопленную энергию маховика приходится частично или полностью рассеивать в виде тепла на сопротивление.
Предлагаемая маховиковая система в значительной мере лишена указанных недостатков за счет того, что производится обмен энергией между ЭДМ, минуя источник.
Указанный обмен энергией достигается за счет того, что ток, потребляемый от источника питания и рекуперируемый в источник ЭДМ спарки, регулируется пропорционально аналогичному току ЭДМ, не входящих в спарку, с учетом сигналов управления, которые вводятся в систему путем алгебраического суммирования с сигналами тока.
Предлагаемая система из-за отсутствия механической связи между маховиками и благодаря замене ее, по существу, на электрическую связь не имеет недостатков, свойственных прототипу.
Ток, потребляемый от источника питания электродвигателем-маховиком, и ток, рекуперируемый ЭДМ в источник питания, назовем одним общим термином: - током питания ЭДМ, а ток, потребляемый ЭДМ от статического преобразователя, назовем током ЭДМ. Ток питания ЭДМ протекает от источника питания к статическому преобразователю или наоборот, а ток ЭДМ протекает от статического преобразователя к обмоткам статора ЭДМ. Эти токи хотя и взаимосвязаны, но, в общем случае отличаются как по величине, так и по характеру. Ток питания ЭДМ - это всегда постоянный ток, а ток ЭДМ может быть как переменным (например, при асинхронных ЭДМ), так и постоянным (двигатель постоянного тока).
Предлагаемое устройство изображено на фиг.1-5, имеющих следующее назначение:
- принципиальная схема маховиковой системы - фиг.1;
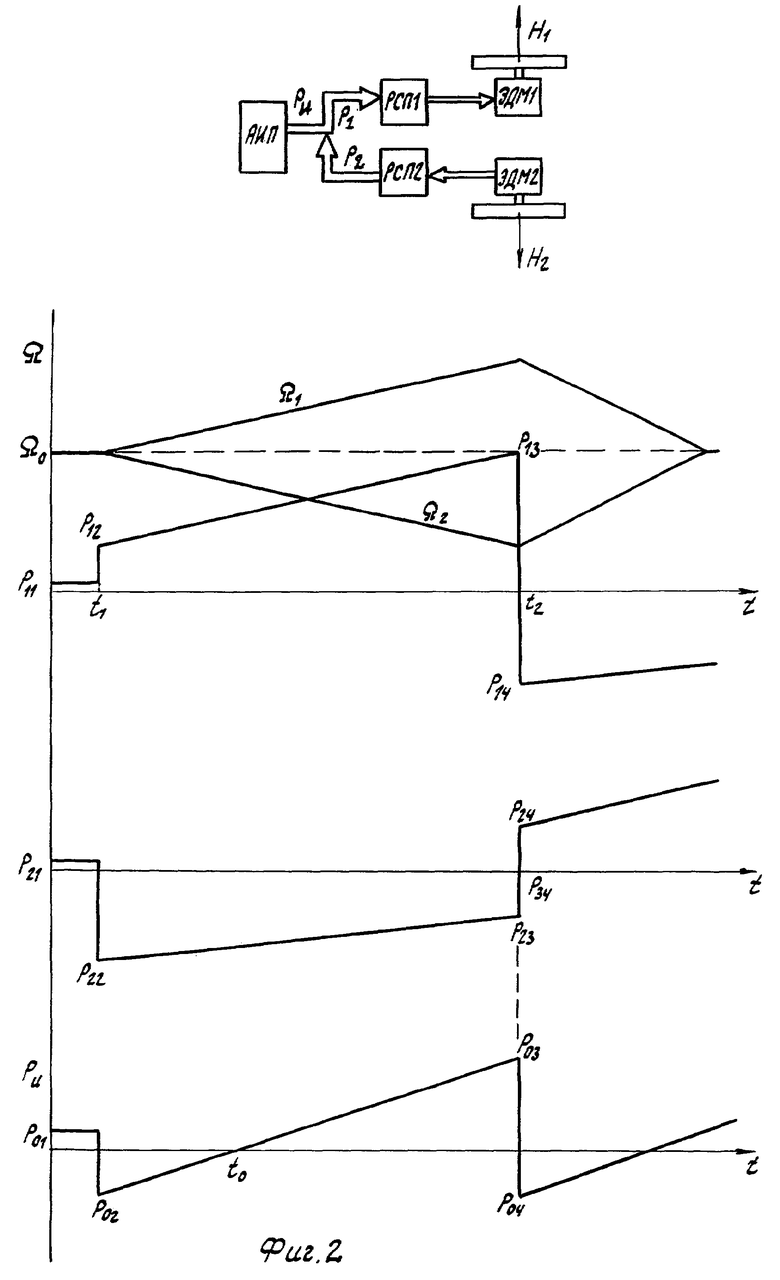
- диаграммы обмена мощностью - фиг.2;
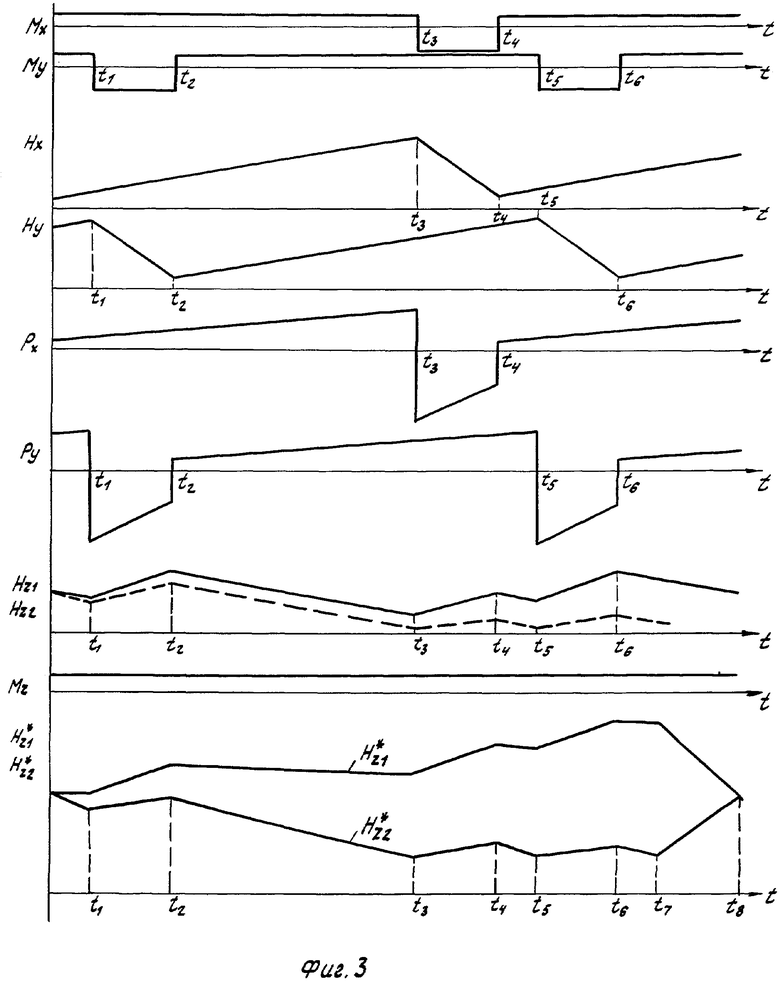
- диаграммы при знакопостоянных моментах - фиг.3;
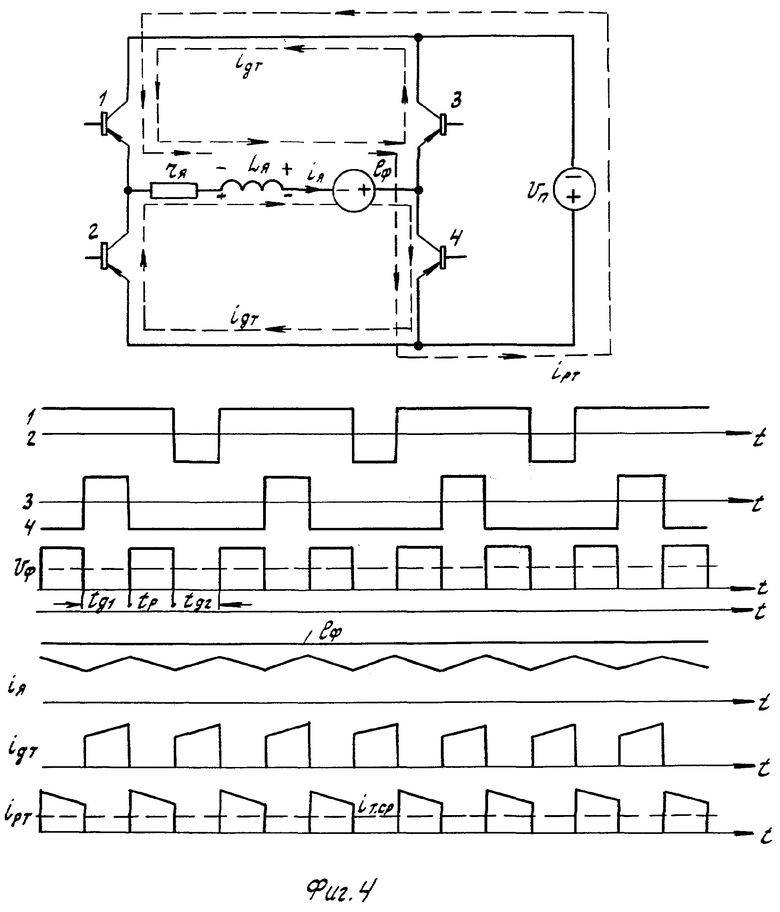
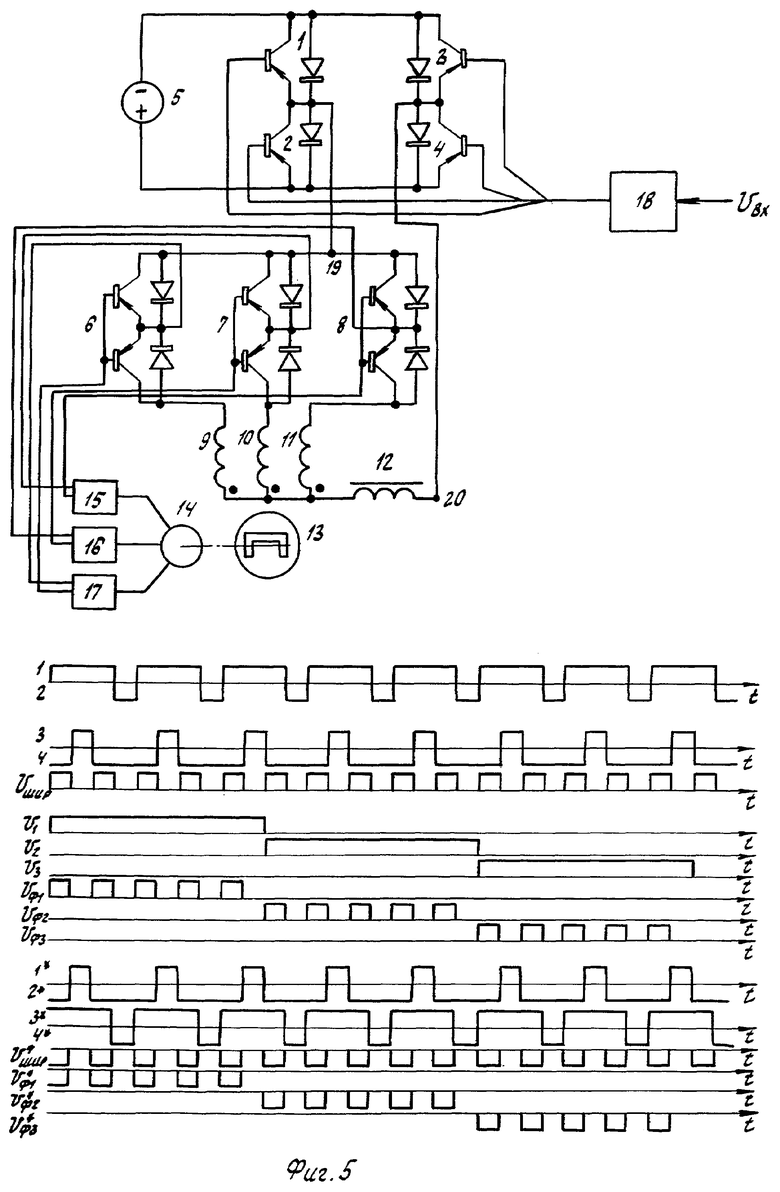
- схема рекуперативного статического преобразователя - фиг.4;
- схема электропривода - фиг.5.
В предлагаемой маховиковой системе, состоящей из четырех ЭДМ, два из которых, принадлежащие к одной оси, объединены в спарку, ток между источником питания, например аккумуляторной батареей, и одним, а также вторым ЭДМ спарки регулируется пропорционально и соответственно сумме и разности двух сигналов.
Один из них формируется путем сложения сигналов, пропорциональных по величине значениям токов, между источником питания и ЭДМ, не входящими в спарку.
Второй из упомянутых сигналов формируется как разность двух сигналов, один из которых образуется посредством сложения сигнала регулирования динамического момента спарки ЭДМ и сигнала, пропорционального по величине току одного ЭДМ спарки, а второй формируется путем вычитания из сигнала, пропорционального по величине току второго ЭДМ спарки, указанного сигнала регулирования динамического момента.
На фиг.1 ЭДМ 1 и 2, принадлежащие к оси Z КА, расположены так, что векторы кинетических моментов Нz1 и Нz2 направлены встречно параллельно друг другу, т.е. образуют спарку ЭДМ.
Два другие ЭДМ 3 и 4 не входят в спарку и относятся соответственно к осям Х и У. Каждый из ЭДМ содержит двигатель 1 и маховик 5. Схема фиг.1 непосредственно относится к случаю применения двигателей постоянного тока: коллекторных или бесколлекторных [3].
В случае двигателей переменного тока (асинхронных) существо схемы сохраняется, но могут появиться дополнительные цепи, относящиеся к управлению двигателем [2].
Кроме ЭДМ в схему входят рекуперативные статические преобразователи 6; датчики 7 сигналов, пропорциональных по величине току; блоки суммирования 8, 9, 11 и вычитания 10, 12, усилитель 13, схемы сравнения 14. На шины питания 15 подается напряжение питания Uп. На входы 16, 17, 18 поступают сигналы управления Uм моментами, которые вырабатывают соответственно справа ЭДМ, ЭДМ 3 и 4.
Блоки 6, 7, 14, относящиеся к управлению ЭДМ 1 и 2 спарки, образуют регуляторы тока питания этих ЭДМ, так как датчики тока 7 включены в цепь тока питания РСП. Блоки 6, 7, 14, относящиеся к управлению ЭДМ 3 и 4, составляют регуляторы тока якоря ЭДМ, так как их датчики тока включены в цепь выходов РСП.
При управлении по цепи якоря двигатели 1-4 создают электромагнитные моменты Mэмх=KUмх, Mэму=KUму, Mэмz=KUмz. Соответствующие им динамические моменты, которые изменяют скорость маховиков: Mх=Мэмх-Мсх, Mу=Мэму-Мсу, Mz=Мэмz-Мcz, где Mcx, Mcy, Mcz - моменты сопротивления вращению маховиков.
Названные здесь рекуперативные статические преобразователи (РСП) - это такие преобразователи тока, которые подают ток и мощность как от источника питания к нагрузке, так и наоборот: от нагрузки к источнику питания, т.е. работают в режиме рекуперации мощности. Заметим, что большинство транзисторных статических преобразователей - рекуперативные. Рассмотрим, как управляются ЭДМ 3 и 4, не входящие в спарку. Выходной ток РСП пропорционален по величине сигналу ΔU, поступающему на его вход: IРСП=КIΔU, где KI - коэффициент пропорциональности. Так как ΔU≈0, то: IРСП=KIUм. В свою очередь электромагнитный момент двигателя пропорционален току якоря, которым является ток IРСП·Мэм=КICмUм, где Cм - коэффициент. Пропорциональность между током IРСП двигателей 3, 4 и сигналом Uм обеспечивается замкнутыми системами регулирования тока, состоящими из блоков 6, 7, 14.
Как работают такие системы хорошо известно. Заметим, что положительному знаку сигнала Uм соответсвует ток, идущий в условно положительном направлении от источника питания к двигателю, а отрицательному сигналу Uм соответствует направление тока IРСП от двигателя к источнику. Рекуперация тока обеспечивается тем, что ЭДС двигателя преобразуется с помощью РСП в постоянный ток, подаваемый встречно напряжению источника питания.
Положительному значению тока IРСП соответствует двигательный режим ЭДМ с потреблением мощности, а отрицательному - генераторный режим с рекуперацией мощности в источник. В первом случае ЭДМ развивает двигательный момент условно положительного знака, под действием которого скорость маховика возрастает, а во втором случае момент двигателя тормозной, под действием которого скорость Ω уменьшается. Этот момент считается отрицательным. Величина сигнала на выходе датчика тока 7 пропорциональна величине тока, а знак этого сигнала совпадает со знаком тока, т.е. отражает его направление.
Блок 8 алгебраически суммирует сигналы с выходов датчиков 7 и сигнал смещения Uсм, подаваемый на вход 19. Назначение этого сигнала поясняется далее. Суммарный сигнал U1 с выхода блока 8 поступает на управление ЭДМ спарки и является одним из двух вышеупоминавшихся сигналов, пропорционально сумме и разности которых регулируется ток соответственно первого 1 и второго 2 ЭДМ спарки.
Рассмотрим, как управляются ЭДМ 1 и 2 спарки. Ток Iпит1 обмена мощностью ЭДМ 1 с источником через шины питания 15 регулируется пропорционально алгебраической сумме сигналов U1 и U2 с помощью замкнутой системы регулирования тока 6, 7, 14.
Аналогично, ток Iпит.2 обмена мощностью ЭДМ2 регулируется пропорционально разности этих сигналов:
Iпит.1 = -Kп(U1-U2), Iпит.2 = -Kп(U1+U2).
Суммирование и вычитание сигналов U1 и U2 производится блоками 11 и 12 соответственно. Сигнал U2 пропорционален разности двух сигналов U3 и U4: U2=Ko(U3-U4). Один из них, сигнал U3 образуется посредством сложения сигнала регулирования динамического момента Uz, поступающего на вход 16, и сигнала UЯ1, пропорционального по величине току якоря ЭДМ 2: UЯ1=КЯIЯ1. Второй сигнал U4 формируется как разность сигналов UЯ2=КЯIЯ2 и Uz.
В этих формулах КЯ - коэффициент, IЯ1 и IЯ2 - токи якорей ЭДМ 1 и ЭДМ 2 соответственно. Таким образом имеем
где Ко - коэффициент усиления усилителя 13. На основе формул (1) и (2) рассмотрим, как регулируется динамический момент спарки Мz=Mz1-Mz2, где Mэмz1=(Mz1-Mcz1)=CмIЯ1, Mэмz2=CмIЯ2 - электромагнитные моменты соответственно ЭДМ1 и ЭДМ2. Пусть Uz=0; в этом случае должны обеспечиваться равенства Мэмz1=Mэмz2 или IЯ1=IЯ2. Предположим, что это равенство нарушилось, т.е. IЯ2>IЯ1, значит, U3>U4. Тогда появится положительный сигнал U2=Ко(U3-U4).
В соответствии с (I) на выходе блока вычитания 12 сигнал U2 изменит знак на отрицательный, а на выходе блока суммирования 11 сигнал U2 знак сохранит. Поэтому ток IЯ2 получит отрицательное приращение и уменьшится, а ток IЯ1 возрастет. Значит, равенство IЯ1=IЯ2 восстановится. Следовательно, Мэмz1=Mэмz2 и Мэмz=0. При этом остается динамический момент Мz=Mcz1-Mcz2, где Mcz1 и Mcz2 - моменты сопротивления ЭДМ 1 и 2.
Пусть на вход 16 подается сигнал Uz. В соответствии с вышеизложенным и согласно (2) система обеспечивает равенство

так как коэффициент усилия Ко можно сделать достаточно большим. Из (3) следуют очевидные равенства:
UЯ2-UЯ1=2Uz, (IЯ2-IЯ1)=2Uz/КЯ, Mэмz=Mэмz1-Mэмz2=2Cм/КЯUz=KмUz, где Км=2См/КЯ.
Таким образом, при появлении сигнала UZ возникает неравенство токов IЯ1 и IЯ2, что приводит к появлению момента Мэмz, величина которого пропорциональна сигналу Uz.
Рассмотрим, как достигается уменьшение пиковых значений мощности, потребляемой от источника питания.
Принцип взаимной компенсации мощности, потребляемой ЭДМ, поясняет фиг.2, где изображена спарка ЭДМ, РСП и автономный источник питания АИП, В исходном состоянии оба ЭДМ имеют скорость Ωо. С момента t1 ЭДМ1 разгоняется, а ЭДМ2 тормозится, при этом ЭДМ1 потребляет мощность, которая возрастает от значения P12 до P13, а ЭДМ2 рекуперирует ее (от Р22 до Р23). Потоки мощности P1 и Р2 частично взаимно компенсируются, поэтому результирующий поток мощности Pи, циркулирующий в выходной цепи АИП, уменьшается и достигает значений P03<P13 и P02<P22. В момент времени t0 P1=P2 и Ри=0. Так как величины потребляемой и регулируемой мощностей зависят от скорости, то при отсутствии взаимосвязи между режимами работы ЭДМ1 и ЭДМ2 результирующая мощность Ри, хотя и уменьшается, но все же изменяется в широких пределах: от рекуперируемого значения Р02 до Р03. Для выравнивания потребляемой от АИП мощности в предлагаемом устройстве режимы ЭДМ взаимосвязаны.
Для этой цели служит сигнал U1, положительному значению которого соответствует отрицательное, рекуперативное направление тока от РСП 6, принадлежащих к системе регулирования ЭДМ спарки; в формулах (1) это выражается с помощью знака минус. Если суммарный ток ЭДМ 3 и 4 имеет положительное направление, что соответствует потреблению энергии, то ЭДМ 1 и 2 с помощью систем регулирования тока 6, 7, 14 создают рекуперативный ток, величина которого пропорциональна току потребления ЭДМ 3, 4. Таким образом ЭДМ 1 и 2 по сигналу U1 рекуперируют мощность, компенсируя частично или полностью потребление мощности ЭДМ 3 и 4. Очевидно, что ЭДМ 1 и 2, работая в режиме генератора, развивают тормозной момент, скорость их снижается. Если же суммарный ток питания ЭДМ 3 и 4 имеет рекуперативный характер, то системы регулирования тока 6, 7, 14 создают двигательный режим ЭДМ 1 и 2, которые разгоняются, накапливая впрок кинетическую энергию. При этом рекуперируемая мощность не расходуется бессмысленно на сопротивлениях и не поступает в источник питания, а целенаправленно запасается в виде кинетической энергии маховиков ЭДМ спарки.
В установившихся режимах полной компенсации потребляемой мощности за счет рекуперируемой принципиально быть не может из-за потерь мощности в двигателях, РСП и других силовых цепях. Но чем выше к.п.д. этих устройств, тем большая степень компенсации достигается. Глубина компенсации устанавливается, например, с помощью дополнительного сигнала Uсм, подаваемого на вход 19 блока 8. Сам по себе этот сигнал устанавливает ток потребления в системах регулирования 6, 7, 14 тока ЭДМ спарки, вызывая тем самым разгон ЭДМ 1, 2 и накопление ими кинетической энергии. Поэтому в результате суммирования в блоке 8 с двумя другими сигналами сигнал Uсм уменьшает глубину компенсации мощности, потребляемой ЭДМ 3 и 4, мощностью, рекуперируемой ЭДМ 1 и 2. При наличии сигнала Uz на входе 16 режим работы ЭДМ 1 и 2 определяется суммарным воздействием регуляторов тока питания 6, 7, 14 по сигналу U1 и тока якоря по сигналу Uz.
Рассмотрим работу системы в динамическом режиме. Известно [1], что работа ЭДМ имеет циклический характер, при отработке знакопостоянных возмущающих моментов скорость двигателя-маховика, возрастая, достигает предельных значений, при которых ЭДМ теряет свои управляющие свойства, для восстановления которых производится "разгрузка" маховика с помощью газореактивной системы, в процессе которой ЭДМ тормозится. На фиг.3 показан полный цикл работы ЭДМ при создании знакопостоянных управляющих моментов. Моменты Мх и Му создаются двигателями 3 и 4 соответственно (фиг.1).
Их положительные значения соответствуют режиму управления космическим аппаратом по сигналам Uх, Uу постоянной величины. Отрицательные значения этих моментов на интервалах времени t1-t2, t3-t4, t5-t6 соответствуют режиму разгрузки.
Допустим вначале, что спарка ЭДМ не создает управляющего момента: Мz=0, Uz=0. В этом случае U3=U4 (фиг.1), Мэмz1=Mэмz2.
Под воздействием моментов Mх и Mу положительной величины скорости Ωх и Ωу, а также кинетические моменты Hх=J Ωх, Ну=J Ωу (J - момент инерции маховиков) возрастают (фиг.3), а во время "разгрузки" падают. При нарастании скорости ЭДМ работают в двигательном режиме, потребляя мощность Pх и Pу (интервалы времени 0-t3 для Рх, 0-t1, t2-t5 для Ру). В режиме "разгрузки" ЭДМ 3 и 4 поочередно рекуперируют мощность, что отражено на фиг.3 в виде отрицательных значений Рх, Ру на интервалах времени t3-t4, t1-t2, t5-t6. Предположим, что начальные значения кинетических моментов ЭДМ спарки одинаковы: Hz1=Hz2. Так как Мэмz1=Mэмz2, Mcz1=Mcz2, то скорости ЭДМ спарки также равны между собой, изменяясь одинаково под воздействием моментов, Мэмz1, Mэмz2, величина которых регулируется сигналом U1 (фиг.1).
Величины мощностей Pх, Pу пропорциональны току питания: Pх=Uп·Iпит.х, Pу=Uп·Iпит.у, поэтому сигнал U1 во времени повторяет суммарную временную диаграмму Pх+Ру. На интервале времени 0-t1 оба двигателя, как видно из зависимостей Рх(t), Pу(t) потребляют мощность, следовательно, сигнал U1=Кn (Iпит.х+Iпит.у) имеет условно отрицательное значение и переводит, как сказано выше, ЭДМ 1 и 2 спарки в режим рекуперации мощности, величина которой Pрек=KpU1. Здесь Kп и Kp - коэффициенты пропорциональности. Следовательно, от источника питания потребляется разность мощностей Pп=(Pх+Pу) - Pрек. Ясно, что Pп≪(Pх+Pу) и зависит от к.п.д., всей установки: чем выше к.п.д. (η), тем меньше величина Рп. В предельном (физически не реальном) случае η=1, при этом Pх+Ру=Ррек и Pп=0, т.е. потребление мощности от источника отсутствует. Достаточно один раз разогнать ЭДМ 1 и 2 спарки, затратив на это мощность, а в дальнейшем система работает за счет перекачки энергии от маховиков 3,4 к маховикам 1, 2 и наоборот. Однако в системе всегда имеются потери мощности, поэтому Рп>0. Под воздействием тормозного момента кинетические моменты Hz1 и Hz2 ЭДМ спарки снижаются. Описанный режим работы продолжается на интервалах времени t2-t3, t4-t5. На интервале времени t1-t2 ЭДМ 3 потребляет мощность Pх, а ЭДМ 4 ее рекуперирует (Ру). Как видно из фиг.3 Ру>Рх.
Поэтому сигнал U1 пропорционален рекуперируемой мощности (Ру-Рх). Под воздействием U1 двигатели спарки переходят в двигательный режим и потребляют мощность (Ру-Рх).
Таким образом источник питания избавляется от необходимости восприятия рекуперируемой мощности. Скорость ЭДМ 1 и 2 и кинетический момент Нz1, Hz2 возрастают.
Этот режим повторяется на интервале t5-t6. Аналогичный режим возникает на интервале t3-t4, но источником энергии служит ЭДМ 4.
Так как неизбежны потери мощности, то суммарная мощность, потребляемая ЭДМ 3 и 4 на интервалах времени 0-t1, t2-t3, t4-t5 и т.д. больше, чем рекуперируемая - на интервалах t1-t2, t3-t4, t5-t6. Поэтому при отсутствии сигнала Uсм на входе 19 (фиг.1) преобладает тормозной момент ЭДМ спарки и кинетический момент Hz1, Hz2 постепенно снижается, как показано пунктиром на фиг.3. Чтобы этого не было, вводится сигнал смещения Uсм, по которому ЭДМ спарки создают дополнительную составляющую двигательного момента, которая препятствует уменьшению Hz1 и Hz2 ниже допустимого уровня. При этом от источника питания потребляется мощность, равная потери мощности в системе.
Пусть на вход 16 подается сигнал Uz. Ток якоря ЭДМ2 уменьшится, а ЭДМ 1 возрастет на величину, пропорциональную Uz, вследствие чего момент двигателя 1 возрастет, а двигателя 2 уменьшится. Поэтому изменение кинетических моментов ЭДМ  и
и  изображается расходящейся диаграммой (фиг.3).
изображается расходящейся диаграммой (фиг.3).
В момент t7 величина  достигает предельного значения, после чего производится "разгрузка" на интервале времени t7-t8. При этом сигнал Uz изменяет полярность и ЭДМ 1 тормозится, а ЭДМ 2 разгоняется. Торможение ЭДМ 1 сопровождается выделением энергии, а разгон ЭДМ 2 - ее поглощением, в результате чего от источника питания потребляется мощность, равная мощности потерь.
достигает предельного значения, после чего производится "разгрузка" на интервале времени t7-t8. При этом сигнал Uz изменяет полярность и ЭДМ 1 тормозится, а ЭДМ 2 разгоняется. Торможение ЭДМ 1 сопровождается выделением энергии, а разгон ЭДМ 2 - ее поглощением, в результате чего от источника питания потребляется мощность, равная мощности потерь.
В заключение рассмотрим основные пути технической реализации отдельных блоков системы. На фиг.4 в качестве простейшего примера приведена схема рекуперативного статического преобразователя. Двигатель в этой схеме представлен цепью rЯ-LЯ-eФ. Транзисторы 1, 2, 3, 4 переключаются в соответствии с приведенными диаграммами 1-2, 3-4.
На нагрузке формируются импульсы напряжения Uф с регулируемой скважностью γ. Среднее значение напряжения Uср=γUп. На интервалах времени tд1 открыты ключи 1 и 3; под действием э.д.с. eФ возникает ток динамического торможения iдт в контуре, образованном ключами 1-3. В следующий интервал времени tp э.д.с. самоиндукции стремится сохранить направление тока в индуктивности LЯ и складывается по величине с eФ. Так как на этом интервале открыты ключи 1-4, то под воздействием суммарной э.д.с. через источник протекает рекуперативный ток iрт, в результате чего в источник рекуперируется мощность iртср·Un, где iртср - среднее значение тока iрт.
Возможны и другие, более современные, но и более сложные схемы.
При описании схемы, приведенной на фиг.1, указывалось, что ЭДМ по соответствующим сигналам работают как в двигательном, так и в генераторном режимах и переходят из одного режима в другой. На фиг.5 показана схема, реализующая эти режимы на примере бесколлекторного двигателя постоянного тока. Здесь 1, 2, 3, 4 - ключи широтно-импульсного регулятора (ШИР), 5 - источник питания, 6, 7, 8 - коммутатора фазных обмоток 9, 10, 11, включенных последовательно с дросселем 12; 13 - ротор, 14 - датчик положения ротора ДПР: 15, 16, 17 - схемы формирования сигналов ДПР; 18 - широтно-импульсный модулятор. Ниже схемы приведены диаграммы, характеризующие ее работу, где 1-2, 3-4 диаграммы переключения ключей 1, 2 и 3, 4 ШИР. На выходе ШИР (точки 19, 20) формируются импульсы напряжения Uшир, полярность и скважность которых определяются соответственно полярностью и величиной входного сигнала Uвх. Напряжения управления 1-2, 3-4 формируются широтно-импульсным модулятором 18. Положительным значением Uвх соответствуют диаграммы, имеющие на фиг.5 обозначения без звездочек, а отрицательным - со звездочками. Формирователи 15, 16, 17 вырабатывают напряжения U1, U2, U3 соответственно, которые характеризуют положение ротора 14. Эти напряжения управляют ключами 6, 7, 8, в результате переключения которых формируются фазные напряжения Uф1, Uф2, Uф3 положительной полярности при Uвх>0 и 

 отрицательной полярности при Uвх<0. Для уменьшения момента сопротивления обмотки 9, 10, 11 расположены на немагнитном статоре и имеет незначительную индуктивность. Для того чтобы ток в фазе на интервале включения был непрерывным, включен дроссель 12. Предположим, что скорость двигателя Ω>0 при Uвх>0. Если Uвх изменит знак на обратный, то полярность напряжения Uф1, Uф2, Uф3 также изменится на противоположную, вследствие чего двигатель перейдет в генераторный режим и будет тормозиться. После достижения нулевой скорости двигатель разгоняется при Ω<0, работая в двигательном режиме.
отрицательной полярности при Uвх<0. Для уменьшения момента сопротивления обмотки 9, 10, 11 расположены на немагнитном статоре и имеет незначительную индуктивность. Для того чтобы ток в фазе на интервале включения был непрерывным, включен дроссель 12. Предположим, что скорость двигателя Ω>0 при Uвх>0. Если Uвх изменит знак на обратный, то полярность напряжения Uф1, Uф2, Uф3 также изменится на противоположную, вследствие чего двигатель перейдет в генераторный режим и будет тормозиться. После достижения нулевой скорости двигатель разгоняется при Ω<0, работая в двигательном режиме.
Как видно из фиг.4, 5, основные узлы схемы фиг.1 выполняются достаточно просто. Остальные блоки имеют общеизвестные схемы и не требуют пояснений.
Предложенное устройство представляет собой четырехмаховиковую систему. Поэтому может возникнуть предположение, что такая система превосходит по весу обычную трехмаховиковую систему. Это не так. В результате резкого снижения потребляемой мощности появляется возможность значительного увеличения рабочих скоростей ЭДМ, что приводит к снижению их веса. В итоге четырехмаховиковая система при управлении ею предложенным способом имеет меньший вес, чем трехмаховиковая, что убедительно показано в протоколе испытаний. Кроме того наличие четвертого маховика придает системе избыточность, что обеспечивает повышение надежности.
Источники информации
1. Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией космических аппаратов. М.: Наука, 1974, с.369-378.
2. Кэннон. Некоторые основные соотношения для динамических характеристик системы управления угловой ориентацией с инерционными маховиками. - Ракетная техника, 1962, №1, с.73-91.
3. Оклэр. Усовершенствованный управляющий маховик для системы угловой стабилизации космического объекта. - Вопросы ракетной техники, 1970, №8, с.64-76.
Изобретение относится к области электротехники и касается маховиковых систем, предназначенных для управления движением космических аппаратов относительно центра масс. Система включает в себя четыре электродвигателя-маховика (ЭДМ), два из которых, принадлежащие одной оси, образуют спарку. Имеются также регуляторы тока питания ЭДМ спарки и регуляторы тока ЭДМ, не входящих в спарку. Регуляторы тока питания ЭДМ спарки состоят из рекуперативных статических преобразователей, датчиков тока и схем сравнения сигналов, соединенных определенным образом с регуляторами тока других ЭДМ. В системе производится обмен энергией между ЭДМ, минуя источник. Изобретение позволяет уменьшить пиковые значения потребляемой мощности. 5 ил.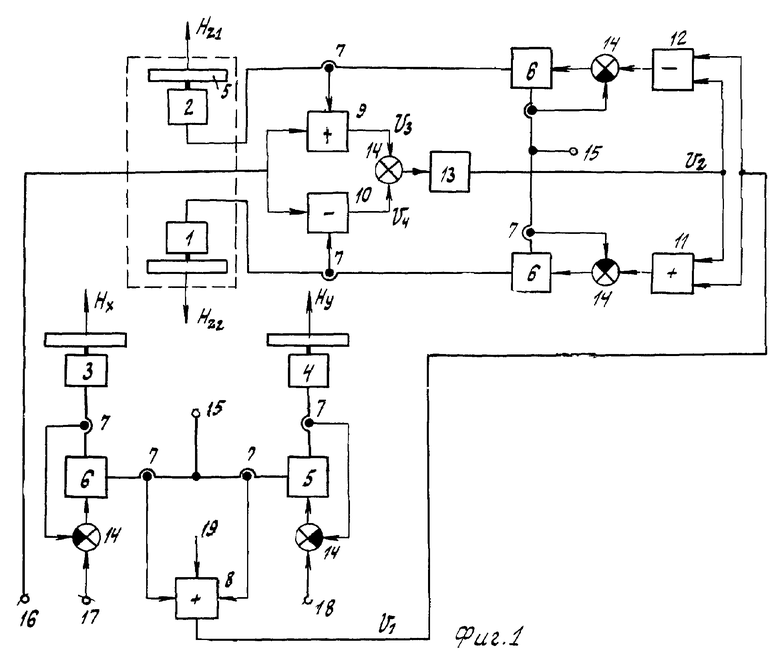
Устройство для трехосной стабилизации космического аппарата, содержащее блок управления моментом, первый и второй выходы которого через первый и второй блоки регулирования тока, другие входы которых подключены к источнику питания, соединены соответственно с первым и вторым электроделителями маховиками, третий и четвертый электродвигатели-маховики, образующие спарку, соответственно через третий и четвертым блоки регулирования тока соединены с источником питания, а также усилитель, блок сравнения, первый, второй, третий блоки сложения и первый, второй блоки вычитания, отличающееся тем, что, с целью снижения пиковых значений потребляемой мощности, в него между источником питания, первым и вторым блоками регулирования тока, а также между вторым, третьим блоками регулирования тока и вторым, третьим электродвигателями - маховиками, введены соответственно первый, второй, третий и четвертый измерители тока, выходы первого и второго измерителей тока через первый блок сложения соединены со входами третьего блока сложения и второго блока вычитания, к другим входам которых подсоединены через усилитель и блок сравнения, входы которого через второй блок сложения и первый блок вычитания соединены с блоком управления моментами и соответственно с третьим и четвертым измерителями тока.
| Б.В.Раушенбах, Е.М.Токарь Управление ориентацией космических аппаратов | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Прибор для сжигания нефти | 1921 |
|
SU369A1 |
| Р.Ж | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

