Предлагаемое изобретение относится к электротехнике, а именно к электромеханическим исполнительным устройствам (ЭМИУ) систем ориентации, стабилизации (СОС) космических аппаратов (КА). Как указано в [1], на с.147-158, известны два типа ЭМИУ: двигатели-маховики (ЭДМ) и силовые гироскопические устройства (СГУ). В обоих типах ЭМИУ в качестве основного элемента входит ЭДМ, в котором вал, на котором установлен маховик и ротор двигателя, вращается в опорах, преимущественно шарикоподшипниковых, которые создают момент сопротивления вращению маховика вследствие неизбежного трения качения. Момент сопротивления оказывает нежелательное возмущающее воздействие на работу СОС, так как он отклоняет корпус КА от заданного стабилизируемого положения. Это нежелательное воздействие усугубляется еще и тем, что трение, обуславливающее момент сопротивления, приводит к износу опор, и, следовательно, к сокращению срока службы ЭДМ.
Известны различные способы уменьшения момента сопротивления вращения маховика ЭДМ. К ним относятся:
вакуумирование вращающихся частей ЭДМ, как показано на рис.6.7 в [1];
применение немагнитных материалов для изготовления якоря двигателя [2];
Эти способы имеют существенные недостатки. Вакуумирование вращающихся частей ЭДМ уменьшает только одну вентиляционную составляющую МВ, тогда как полный момент сопротивления Мс содержит три основных составляющих:
Мс=Мв+Мэм+Моп,
где Мэм и Моп - составляющие, обусловленные электромагнитными потерями в стали и меди двигателя и трением в опорах соответственно.
Применение немагнитного материала для изготовления якоря уменьшает вторую составляющую. Так как третья составляющая (Моп) имеет достаточно большую величину (100-200 Гсм), то указанные способы не решают полностью проблему уменьшения Мс и не решают также задачу увеличения срока службы, который в основном определяется именно третьей составляющей.
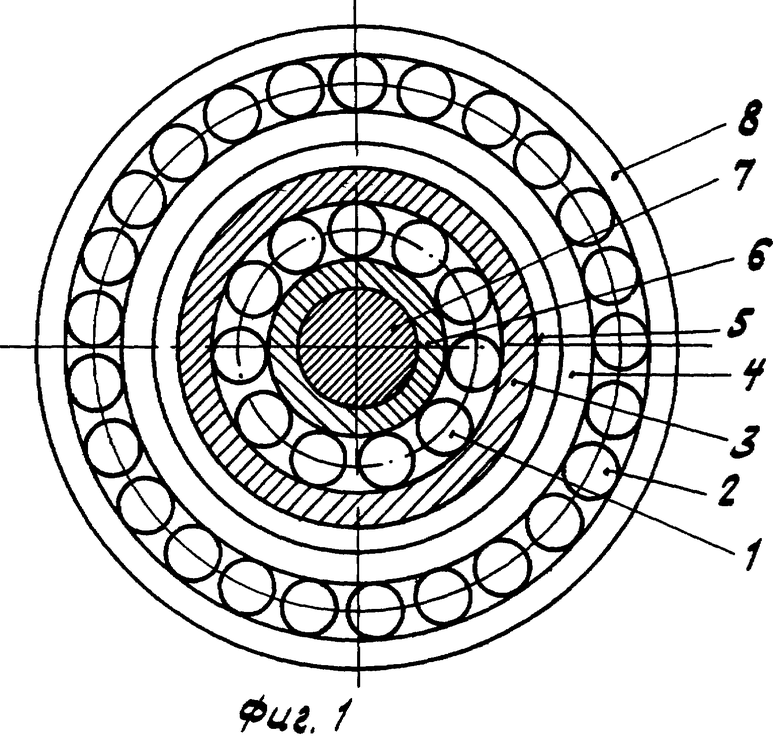
Наиболее близким к предлагаемому способу по технической сущности является способ, предложенный [4] на с.210-216, заключающийся во вращении промежуточного кольца специальной трехколечной электромеханической опоры (ЭМО) (Фиг.1), которая состоит из двух шарикоподшипников 1 и 2; внешнее кольцо 3 одного из них сочленено с внутренним кольцом 4 другого через промежуточное кольцо 5, которое приводится в движение с помощью специального двигателя (на фиг.1 не показан). Внутреннее кольцо первого подшипника насажено на вал 7, а внешнее кольцо 8 закреплено в корпусе двигателя. Вал 7 опирается на две ЭМО: правую и левую. В [4] упоминается способ управления электромеханическими опорами рамки карданова подвеса гироскопа, который заключается в том, что с целью уменьшения момента трения промежуточные кольца правой и левой опор вращаются в разных направлениях со скоростью, намного превышающей скорость поворота рамки карданова подвеса. В другом варианте управления оба кольца совершают колебательные движения в противофазе по отношению друг к другу, вследствие чего в любой момент времени они движутся встречно, причем их скорость опять таки больше скорости поворота рамки подвеса. При таком условии скорость качения шариков почти не изменяется при движении рамки, а от этого сопротивление их качению практически постоянно и преодолевается двигателем, вращающим промежуточное кольцо. Поэтому вал 7 вращается почти без сопротивления.
Таким образом, в прототипе предлагается способ подчиненного регулирования скорости промежуточного кольца, при котором управление скоростью подчинено поставленной задаче уменьшения момента сопротивления. Термин "подчиненное регулирование" широко известен в электроприводе и применяется в тех случаях, когда данный параметр (например, ток якоря) регулируется так, чтобы обеспечить определенное значение другого параметра (например, скорости). В этом же смысле этот термин употреблен в настоящем описании.
Применительно к двигателям-маховикам данные способы имеют существенный недостаток, который состоит в том, что они не обеспечивают уменьшения момента сопротивления при высокой скорости вала 7, что характерно для ЭДМ. Например, если скорость вращения маховика ЭДМ равна 10000 об/мин, то в силу вышеуказанного соотношения скоростей промежуточное кольцо должно вращаться со скоростью (105-106) об/мин, что практически не реализуемо из-за возникновения вибрации, трения и интенсивного износа подшипников.
Целью предлагаемого способа является уменьшение момента сопротивления вращению маховика и увеличение срока службы электромеханических опор. Это уменьшит возмущающее воздействие на корпус КА, вследствие чего возрастет точность стабилизации его положения и уменьшится расход рабочего тела бортовой газо-реактивной системы [1], что в свою очередь даст возможность увеличения полезной нагрузки КА.
Поставленная цель достигается тем, что отношение скоростей вращения промежуточного кольца электромеханической опоры и маховика ЭДМ поддерживается равным фиксированному значению, выбранному из диапазона чисел от нуля до единицы, и соответствующего требуемому значению момента сопротивления; при этом вращение упомянутого промежуточного кольца осуществляется в направлении, совпадающем с направлением вращения маховика.
Заявителю не известны технические решения в данной области, имеющие существенные признаки, отличающие заявляемое от прототипа.
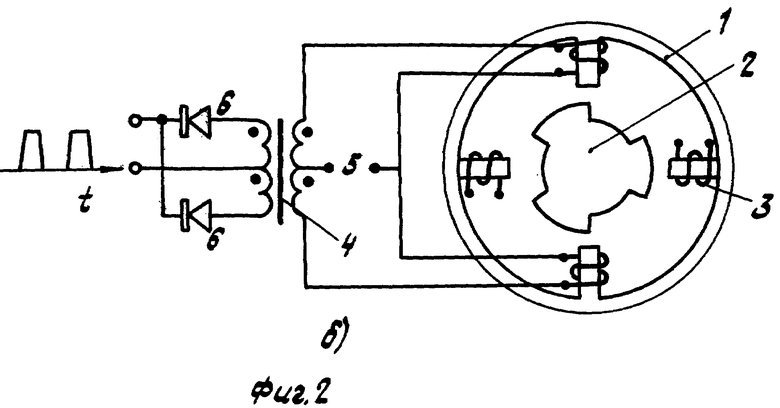
На фиг.1 показана шарикоподшипниковая опора с промежуточным кольцом, на фиг.2 изображен ЭДМ (а) и датчик скорости (б); на фиг.3, 4 представлены устройства поддержания заданного соотношения скоростей, с помощью которых может быть реализован предлагаемый способ.
ЭДМ (фиг.2а) состоит из маховика 1, электродвигателя 2, датчика скорости 3 и двух электромеханических опор 4, каждая из которых содержит внешний 5 и внутренний 6 шарикоподшипники, промежуточное кольцо 7, двигатель 8, датчик скорости 9. Электрическая схема включения датчика скорости (фиг.2б), кроме статора 1, ротора 2, обмоток 3, содержит трансформатор 4, который подключается к источнику высокочастотного (20 кГц) переменного напряжения 5, и диодный выпрямитель 6.
Для ЭДМ, работающего в составе ЭМИУ, характерны два режима работы [1]:
как источника динамического момента, непосредственно воздействующего на корпус КА;
как источник кинетического момента.
В связи с этим схемы фиг.3 и 4 несколько отличаются по составу. Схема фиг.3 может быть использована, для поддержания требуемого соотношения скоростей в обоих режимах и состоит из ЭДМ1, в котором 2 - это собственно электродвигатель, 3 - датчик скорости (узлы 2 и 3 соответственно на.фиг.2а), электромеханических опор 4, каждая из которых состоит из промежуточного кольца 5, двигателя 6 и датчика скорости 7 (узлы 7, 8, 9 на фиг.2а), регулятора момента двигателя 8, регуляторов скорости 9, делителя частоты 10 и схемы определения знака скорости 11. Схема фиг.4 состоит из тех же узлов 1-7, регулятора скорости электродвигателя-маховика 8, регуляторов скорости 9, генератора опорной частоты 10 и делителя частоты 11.
Способ осуществляют следующим образом. Промежуточные кольца 5 (фиг.3) вращаются со скоростью Ωк меньшей скорости маховика Ωм, что приводит к уменьшению скорости вращения колец подшипника относительно друг друга. А так как момент сопротивления существенно зависит от относительной скорости вращения колец подшипников, то ее уменьшение ведет к уменьшению момента сопротивления и возрастанию срока службы ЭМО. Например, при малых скоростях (1-10) об/м момент сопротивления равен (10-30) Гс.см, а при скорости 10 об/м достигает (200-300) Гс-см.
В первом из упоминавшихся режимов скорость ЭДМ непрерывно изменяется по величине и направлению в соответствии с соотношением  где Md динамический момент (создающий угловое ускорение), Jм - момент инерции маховика.
где Md динамический момент (создающий угловое ускорение), Jм - момент инерции маховика.
Устройством поддержания отношения скоростей обеспечивается скорость вращения промежуточного кольца 7 (фиг.2а) в соответствии с соотношением Ωк=α Ωм, где α - фиксированная величина из диапазона 0≤α≤1. Как видно из фиг.2а, относительная скорость вращения колец внешнего подшипника 5 равна Ωк, a внутреннего ( Ωм- Ωк). Например, если α=0,5, то Ωк=0,5 Ωм и относительные скорости колец подшипников составляют половину скорости Ωм. Момент сопротивления подшипников 5 компенсируется двигателем 8, поэтому вращению маховика препятствует момент сопротивления подшипника 6, но так как относительная скорость его колец составляет 0,5 Ωм и момент сопротивления вращению маховика уменьшается примерно в два раза по сравнению с тем значением, которое было бы при неподвижном промежуточном кольце. Если α=0, то промежуточное кольцо заторможено и относительная скорость подшипника 6 равна Ωм. Поэтому уменьшения момента сопротивления вращению маховика не происходит. Если α=1, то кольцо 7 вращается со скоростью Ωм, т.е. кольца подшипника 6 взаимно неподвижны, следовательно, момент сопротивления вращанию маховика отсутствует. Из сказанного видно, что изменение отношения скорости α= Ωк/ Ωм от 0 до 1 приводит к изменению момента сопротивления маховика от максимального значения до нуля. При этом направления скоростей Ωк и Ωм должны совпадать.
Выбор значения α зависит от принципов работы СОС. Отнюдь не обязательно во всех случаях уменьшать момент сопротивления до нуля. Например, в релейных СОС [1] с помощью подбора величины Мс оптимизируется предельный односторонний цикл автоколебаний.
На вход устройства фиг.3 из СОС поступает сигнал управления динамическим моментом ЭДМ υу, который, воздействуя на регулятор 8, определяет величину и знак динамического момента ЭДМ. Регулятор моментов 8 может быть выполнен, например, по схеме, приведенной в [5]. Скорость ЭДМ Ωм с помощью датчика 3 преобразуется в частоту ƒd=р Ωм следования импульсов, где р - коэффициент преобразования. Эти же последовательности импульсов несут информацию о направлении вращения маховика, как это видно из фиг.2б. При вращении зубчатого ротора 2 изменяется индуктивность обмоток 3, которые включены последовательно с плечами трансформатора 4 и высокочастотным источником питания 5. Вследствие модуляции индуктивности обмоток 3 из-за переменного зазора на выходе трансформатора 4 образуется амплитудно-модулированное высокочастотное напряжение, которое после выпрямления диодами 6 имеет вид импульсов (фиг.2б), следующих с частотой ƒd=р Ωм. Так как датчик скорости имеет две пары обмоток, сдвинутых на 90°, то формируются две последовательности импульсов со сдвигом на ±90 электрических градусов, причем знак "+" соответствует одному направлению вращения маховика, а знак "-" соответствует противоположному направлению. Схема, определения знака скорости (СОЗС) 8 (фиг.3) выдает сигнал "0" или "1" в зависимости от фазового сдвига, и может быть выполнена, например, в соответствии со схемой, приведенной в [6].
Сигнал знака скорости с выхода СОЗС поступает на вход регулятора скорости 9, куда также поступают импульсы с выхода делителя частоты 10, коэффициент деления которого равен Кд=1/α. Если α=0,5, то Кд=2; если α=1, то Кд=1 и на вход 9 поступает частота датчика скорости 3. Если же α=0, то Кд=∞, Физически это означает, что на выходе делителя 10 выдаются импульсы низкой частоты. Изменение коэффициента деления осуществляется по сигналу N, который подается в виде параллельного кода на управляющие входы делителя 10. С выхода делителя частоты 10 импульсы частотой αƒд=αр Ωм служат сигналом задания регулятора скорости 9, на третий вход которого поступают импульсы с выхода датчика скорости 7, частота которых пропорциональна скорости промежуточного кольца 5, вращаемого двигателем 6: ƒк=р Ωк. Так как в цифровых астатических системах управления скоростью рассогласование в установившемся режиме отсутствует, то: р· Ωк=αр Ωм, откуда следует соотношение Ωк=α Ωм, что и требуется для реализации предлагаемого способа. Изменяя код N, можно в широких пределах изменять отношение скоростей Ωк/ Ωм=α. Например, по заранее снятой зависимости Мс( Ωк) для требуемого значения Mс находится скорость Ωк, а затем - величина α, которая задается соответствующим кодом N.
Как указывалось выше, для гироскопических исполнительных устройств характерен режим работы ЭДМ с постоянной скоростью Ωм=Н0/IМ. В этом случае возможна, другая реализация предлагаемого способа (фиг.4). Вместо регулятора момента, в схеме фиг.4 имеется регулятор скорости ЭДМ 8, на вход которого поступает частота задания с выхода задающего генератора 10. Так как кинетический момент имеет неизменное направление, то схема СОЗС отсутствует, а частота задания скорости промежуточного кольца поступает на вход регулятора скорости 9 с выхода делителя частоты 11. В данной схеме, как и в предыдущей, обеспечивается требуемое по условиям предлагаемого способа соотношение скоростей Ωк/ Ωм=α, которое может варьироваться кодовым сигналом N. Регуляторы скорости 9 на фиг.3, 4 и 8 на фиг.4 могут быть выполнены по схеме, приведенной в [7].
Таким образом, предлагаемый способ и прототип имеют общий признак, заключающийся в подчиненном регулировании, при котором управление величиной скорости подчинено достижению поставленной цели - снижению момента сопротивления.
Однако в предлагаемом способе уровень, на котором стабилизируется скорость вращения промежуточного кольца, изменяется пропорционально скорости электродвигателя-маховика, причем отношение величин этих уровней меньше единицы и выбирается из требуемого момента сопротивления вращению маховика, что и является отличительной особенностью предложенного способа.
Как следует из описания устройств, показанных на фиг.2, 3, 4, при данном способе управления ЭМО часть момента сопротивления (Мc1) преодолевается двигателем, вращающим промежуточное кольцо, а другая его часть (Мc2) оказывает тормозящее воздействие на маховик. Возникает вопрос о влиянии этих составляющих на движение КА относительно центра масс. Составляющая Mc2, как и в обычных шариковых опорах, вызывает нежелательное приращение кинетического момента  , которое в соответствии с законом о постоянстве количества движения передается на корпус КА, отклоняя его от стабилизируемого направления. Составляющая Мc1 тоже вызывает приращение кинетического момента ΔH1, но это приращение ничтожно мало (ΔH1≪ΔH2), потому что момент инерции кольца Iк намного меньше момента, инерции маховика Iм. Например, при Н0=100 нмс и Ωм=500 1/с момент инерции маховика Iм=2000 Гс.мс2, тогда как момент инерции кольца и ротора двигателя Iк≤0,01 гсмс2, т.е. Iк≪Iм. Вследствие неравенства ΔН1≪ΔН2 вращение промежуточного кольца практически не оказывает воздействия на корпус КА. В то же время оно эффективно уменьшает момент сопротивления вращению маховика, работе скорости подшипников, что увеличивает срок их службы. Что касается двух остальных вышеупоминавшихся составляющих (Mв и Мэм), то они могут быть уменьшены известными называвшимися способами: вакуумированием вращающихся частей ЭДМ и применением немагнитного статора.
, которое в соответствии с законом о постоянстве количества движения передается на корпус КА, отклоняя его от стабилизируемого направления. Составляющая Мc1 тоже вызывает приращение кинетического момента ΔH1, но это приращение ничтожно мало (ΔH1≪ΔH2), потому что момент инерции кольца Iк намного меньше момента, инерции маховика Iм. Например, при Н0=100 нмс и Ωм=500 1/с момент инерции маховика Iм=2000 Гс.мс2, тогда как момент инерции кольца и ротора двигателя Iк≤0,01 гсмс2, т.е. Iк≪Iм. Вследствие неравенства ΔН1≪ΔН2 вращение промежуточного кольца практически не оказывает воздействия на корпус КА. В то же время оно эффективно уменьшает момент сопротивления вращению маховика, работе скорости подшипников, что увеличивает срок их службы. Что касается двух остальных вышеупоминавшихся составляющих (Mв и Мэм), то они могут быть уменьшены известными называвшимися способами: вакуумированием вращающихся частей ЭДМ и применением немагнитного статора.
Источники информации
1. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974.
2. Кронеберг Ю.Н., Гейнц Э.Р., Литвинов В.П. Бесконтактный двигатель постоянного тока с якорем на немагнитной диэлектрической основе. Сб. Двигатели постоянного тока с полупроводниковыми коммутаторами. Наука, Л.: 1972, с.129-135.
4. Гироскопические системы. Часть III. Элементы гироскопических приборов. Под ред. Д.С.Пельпора. Высшая школа, М.: 1972.
5. Соловьев В.А., Лангин A.M., Волынкин В.В. Моментный вентильный электропривод. Ас. №1310962, Н 02 К 29/06, Н 02 Р 6/00, Бюл. №18, 15.05.87.
6. Лянзбург В.П., Бутаков А.Н., Булдаков В.Н. Вентильный двигатель. А.с. СССР №092013 Н 02 К 29/02, БИ №38, 15.10.79.
7. Митина В.Ф., Туганов Н.М., Виноходов Л.Л., Трусов Е.К., Пионтак Б.М., Крутий М.И. Цифровой электропривод. А.с. №1053250. Н 02 р 5/06, Бюл. №41, 07.11.83.


Изобретение относится к области электротехники, в частности к электромеханическим исполнительным устройствам систем ориентации, стабилизации космических аппаратов. В предложенном способе скорость вращения промежуточного кольца стабилизируется на уровне, отношение величины которого к величине скорости маховика равно фиксированному значению, находящемуся в диапазоне чисел от нуля до единицы, при этом вращение промежуточного кольца осуществляют в направлении вращения маховика. Техническим результатом изобретения является уменьшение момента сопротивления вращению маховика и увеличение срока службы электромеханической опоры. 5 ил.
Способ управления скоростью вращения промежуточного кольца электромеханической опоры электродвигателя-маховика, заключающийся в стабилизации скорости вращения промежуточного кольца по одному из параметров электродвигателя-маховика, отличающийся тем, что, с целью повышения надежности способа, измеряют скорость вращения маховика и по результатам измерения стабилизируют скорость вращения промежуточного кольца на уровне, отношение величины которого к величине измеренной скорости вращения маховика равно фиксированному значению, находящемуся в диапазоне чисел от нуля до единицы, при этом вращение промежуточного кольца осуществляется в направлении вращения маховика.
| Гироскопические системы, ч.III Элементы гироскопических приборов | |||
| Под ред | |||
| Д.С.Пельпора | |||
| В.Ш., М., 1972. |

