Изобретение относится к области проектирования приборов систем навигации и может быть применено для управления асинхронными двигателями силовых гиростабилизаторов с изменяемым кинетическим моментом, применяемых, в частности, в системах ориентации искусственных спутников Земли. В таких гиростабилизаторах двигатель-маховик (источник кинетического момента) разгоняется до номинальной скорости (первичный разгон), а затем по командам системы управления разгоняется или тормозится относительно номинальной скорости. При этом диапазон изменения скорости составляет ±(10-40)% от номинальной.
Таким образом, в рассматриваемом классе силовых гиростабилизаторов необходимо выполнять следующие операции управления двигателем:
1. Первичный разгон до номинальной скорости.
2. Стабилизация скорости вращения на основе разгона и рекуперативного торможения двигателя в ограниченных пределах изменения скорости относительно номинальной, а именно ±(10÷40)% от номинальной.
Вторая операция осуществляется с нормированным моментом двигателя. Для осуществления разгона, торможения, стабилизации скорости вращения и момента двигателя осуществляют регулирование частоты или напряжения таким образом, чтобы задать определенные величины абсолютного скольжения, потока возбуждения машины и тока, потребляемого от источника питания. Известны устройства для разгона и торможения асинхронных двигателей с маховичной нагрузкой, в частности гироскопов. Такие устройства можно подразделить на две группы. К первой группе относятся устройства, в которых изменение частоты задается программно [Л1-7]. Темп изменения частоты может задаваться параметрически [Л6] или корректироваться в функции абсолютного скольжения.
В системах второй группы [Л8, 9] частота напряжения питания двигателя образуется как алгебраическая сумма частоты вращения ротора (частота выходного напряжения тахогенератора) и частоты абсолютного скольжения. Разновидностью этого способа является способ деления частоты тахогенератора [Л10]. Недостатком устройств обеих групп является сложность, обусловленная необходимостью применения задающего генератора с программно изменяемой частотой в устройствах первой группы и наличием блока суммирования частот в устройствах второй группы. Если суммирование частот осуществляется с помощью промежуточного преобразования частоты в напряжение, то в этом случае не удается получить достаточно высокую стабильность абсолютного скольжения, а следовательно, момента двигателя [Л11]. В случае непосредственного суммирования частот для устранения девиации частоты питания двигателя необходимо существенно повышать частоту тахогенератора и уменьшать девиацию частоты с помощью делителя частоты с большим коэффициентом деления. Применение устройства [Л10] также требует делителя частоты.
Предлагаемый способ в значительной мере лишен отмеченных недостатков. Предлагаемый способ отличается простотой, так как согласно предлагаемому способу нет необходимости программного задания частоты, суммирования частот и деления частоты.
Стабилизация скорости вращения маховика на участках разгона и торможения двигателя достигается за счет того, что согласно предлагаемому способу на участках разгона и торможения асинхронного двигателя маховика силовых гиростабилизаторов во время первичного разгон маховика до номинальной скорости и стабилизации скорости вращения на основе разгона и рекуперативного торможения двигателя в ограниченных пределах изменения скорости относительно номинальной, а именно ±(10÷40)% от номинальной, дополнительно осуществляют измерение и нормирование величины сигналов (мгновенных значений) напряжений на выходе усилителей датчика скорости вращения и программно-задающего блока U1(t) и U2(t), при этом непрерывно корректируют величину зоны гистерезиса функционального релейного усилителя с памятью, на основе следующих соотношений |a1|=(k2/k1)U1(t) и -a1=-(k2/k1)U2(t), где k1 и k2 - коэффициенты усиления соответствующих усилителей сигналов датчика скорости вращения и программно-задающего блока, а на выходе функционального релейного усилителя с памятью формируют сигнал, который может быть описан следующей зависимостью:
sign E(t), при |E(t)|≥а1 для всех t>0;
Upэi=
Upэ(i-1), при E(t)∈(-a1, а1) для всех t>0;
где
+1, при E(t)>0;
sign E(t)=0, при E(t)=0;
-1, при E(t)<0;
E(t) - сигнал ошибки, E(t)=(U1(t)-U2(t))Kф(t), Kф(t) - коэффициент усиления, U1(t) и U2(t) - нормированные величины измеренных значений (мгновенных) напряжений на выходе усилителей датчика скорости вращения и программно-задающего блока,
2*а1 - величина зоны гистерезиса функционального релейного усилителя, |a1|=(k2/k1)U1(t) и -a1=-(k2/k1)U2(t),
в начале поступления каждого программно-задающего воздействия обнуляют сигнал на выходе функционального релейного усилителя с памятью.
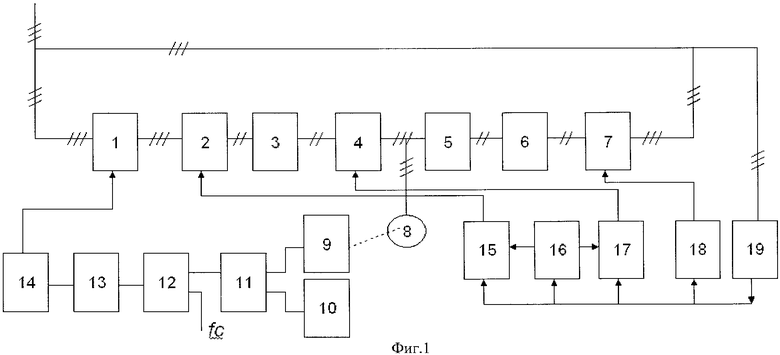
Для реализации предлагаемого способа система содержит последовательно соединенные блок тиристорных коммутаторов, управляемый выпрямитель, первый фильтр постоянного напряжения, автономный инвертор, блок неуправляемых инверторов обратного тока, второй фильтр постоянного напряжения и обратный инвертор, вход которого объединен с входом блока тиристорных коммутаторов и подключен к сети, управляющий вход блока тиристорных коммутаторов соединен с выходом формирователя импульсов, вход которого соединен с выходом дифференцирующей схемы, вход которой соединен с выходом триггера, на тактовый вход которого подают частоту изменения сетевого напряжения, управляющий или счетный вход триггера соединен с выходом функционального релейного усилителя с памятью, первый вход которого соединен с программно-задающим блоком, а второй - с выходом датчика измерения частоты вращения асинхронного двигателя маховика, статорные обмотки которого подключены к выходу автономного инвертора, управляющий вход которого соединен с выходом блока управления автономным инвертором, сигнальный вход которого соединен с первым выходом блока регулирования, второй выход которого соединен сигнальным входом блока управления выпрямителем, выход которого соединен с управляющим входом управляемого выпрямителя, управляющий вход обратного инвертора соединен с выходом блока управления обратным инвертором, при этом питание блоков управления выпрямителем, автономным и обратным инвертором осуществляют от одного источника питания, подключенного к сети.
При этом на выходе функционального релейного усилителя с памятью формируют сигнал, который может быть описан следующей зависимостью:
sign E(t), при |E(t)|≥а1 для всех t>0;
Upэi=
Upэ(i-1), при E(t)∈(-a1, а1) для всех t>0;
где
+1, при E(t)>0;
sign E(t)=0, при E(t)=0;
-1, при E(t)<0;
E(t) - сигнал ошибки, E(t)=(U1(t)-U2(t))Кф(t), Кф(t) - коэффициент усиления, U1(t) и U2(t) - нормированные величины измеренных значений (мгновенных) напряжений на выходе усилителей датчика скорости вращения и программно-задающего блока,
2*а1 - величина зоны гистерезиса функционального релейного усилителя, |a1|=(k2/k1)U1(t) и -a1=-(k2/k1)U2(t), при этом k1 и k2 - коэффициенты усиления соответствующих усилителей датчика скорости вращения и программно-задающего блока.
Как видно из приведенных соотношений для случая, когда dE(t)/dt=0, за счет запоминания предшествующего состояния выходной величины релейного элемента Uрэ(i-1), для всех E(t)∈(-a1, a1), где |2а1|≤&Tp - величина требуемой (заданной) точности отработки ПЗВ, устраняется возможность потери информации о сигнале ошибки до момента входа в зону нечувствительности или гистерезиса функционального релейного усилителя, что поясняет эффект повышения точности отработки ПЗВ в режиме отработки малых изменений E(t) без необходимости вычислять производную от изменения сигнала ошибки. При этом угол проводимости тиристоров в каждой фазе будет функционально связан с текущими значениями основных показателей качества отработки программно-задающих воздействий. Степень функциональных связей можно раздельно установить для каждого канала управления как перед включением в работы системы, так и непосредственно во время обработки, например, каждой "ступеньки" программно-задающих воздействий. Вышеописанные возможности во многих практически важных случаях программного управления электроприводами силовых гиростабилизаторов с точки зрения упрощения процесса настройки и оптимизации режимов регулирования (например, плавности переходных процессов при пуске за счет уменьшения интенсивности электромагнитных процессов) выгодно отличают систему от известных технических решений. При этом выходное напряжение питания инвертора (подаваемое на обмотки двигателя) стабилизируется. Этим однозначно задается величина потока возбуждения машины, а следовательно, и величина развиваемого ею момента. Таким образом, уменьшается второй из вышеназванных недостатков: нестабильность момента двигателя при изменении напряжения питания, температуры окружающей среды. Здесь следует отметить, что остается нестабильность момента, вызываемая изменением параметров двигателя при нагреве или изменении окружающей температуры. Однако эта нестабильность находится в интервале (3-5%), так, например, диапазон изменения окружающей температуры гиростабилизаторов искусственных спутников Земли, размещаемых в гермоконтейнере, обычно находится в интервале (0-40°С), а собственный перегрев асинхронного двигателя мал из-за слабого использования его активных частей.
При проведении патентных исследований из уровня техники не выявлены решения, идентичные заявленному, а следовательно, заявленное изобретение соответствует условию охраноспособности «новизна».
Сущность заявленного изобретения не следует явным образом из решений, известных из уровня техники, следовательно, заявленное изобретение соответствует условию охраноспособности «изобретательский уровень».
Сущность изобретения поясняется чертежами:
на фиг.1 - блок-схема системы стабилизации скорости вращения силовых гиростабилизаторов;
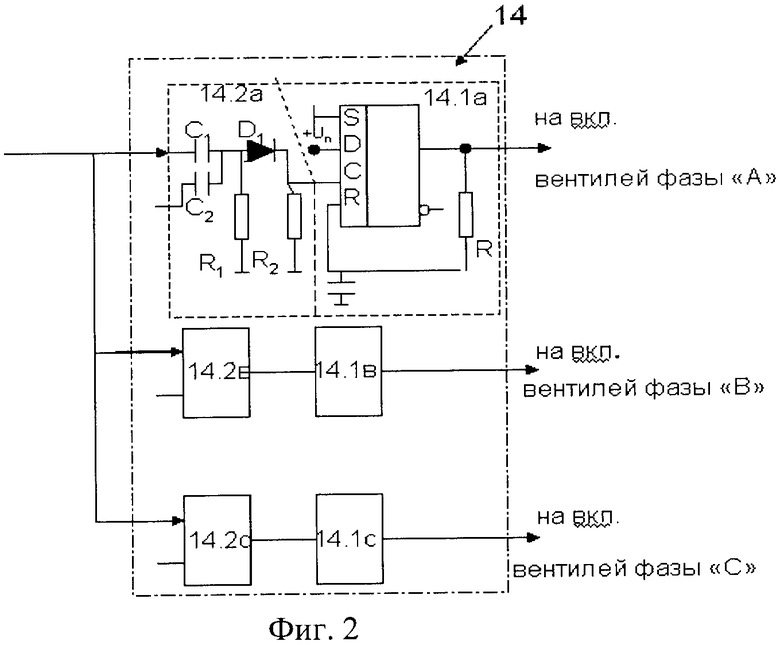
на фиг.2 - пример реализации формирователя импульсов;
на фиг.3-5 - упрощенные схемы примеров отдельных блоков системы стабилизации.
В описании предлагаемой системы для реализации заявленного способа приняты следующие обозначения: 1 - блок тиристорных коммутаторов; 2 - управляемый выпрямитель; 3 и 6 - фильтры постоянного напряжения; 4 и 7 - автономный и обратный инверторы; 5 - группа неуправляемых инверторов обратного тока; 8 - асинхронный двигатель маховика; 9 - датчик частоты вращения; 10 - программно-задающий блок; 11 - функциональный релейный усилитель с памятью; 12 - триггер; 13 - дифференцирующая схема; 14 - формирователи импульсов; 15, 17 и 18 - блоки управления выпрямителем, автономным и обратным инвертором; 16 - блок регулирования и 19 - блок питания.
Рассмотрим работу предлагаемого способа на примере, когда в начальный момент времени - момент подачи, например, ступенчатого программно-задающего воздействия (ПЗВ) с блока 10, на выходе функционального релейного усилителя 11 с памятью будет сформирован Upэi, который может быть описан следующим зависимостями:
sign E(t), при |E(t)|≥а1 для всех t>0;
Upэi=
Upэ(i-1), при E(t)∈(-a1, а1) для всех t>0,
где
+1, при E(t)>0;
sign E(t)=0, при E(t)=0;
-1, при E(t)<0;
E(t) - сигнал ошибки, E(t)=(U1(t)-U2(1))Кф(t), Кф(t) - коэффициент усиления, U1(t) и U2(t) - нормированные величины измеренных значений (мгновенных) напряжений на выходе усилителей датчика скорости вращения 9 и программно-задающего блока 10,
2*а1 - величина зоны гистерезиса функционального релейного усилителя с памятью, |a1|=(k2/k1)U1(t) и -а1=-(k2/k1)U2(t), при этом k1 и k2 - коэффициенты усиления соответствующих усилителей датчика скорости вращения 9 и программно-задающего блока 10.
Как видно из приведенных соотношений, для случая, когда dE(t)/dt=0, за счет запоминания предшествующего состояния выходной величины релейного элемента Upэ(i-1), для всех E(t)∈(-a1, а1), где |2а1|≤&Тр - величина требуемой (заданной) точности отработки ПЗВ, устраняется возможность потери информации о сигнале ошибки до момента входа в зону нечувствительности или гистерезиса функционального релейного усилителя 11 с памятью, что поясняет эффект повышения точности отработки ПЗВ в режиме отработки малых изменений E(t) без необходимости вычислять производную от изменения сигнала ошибки.
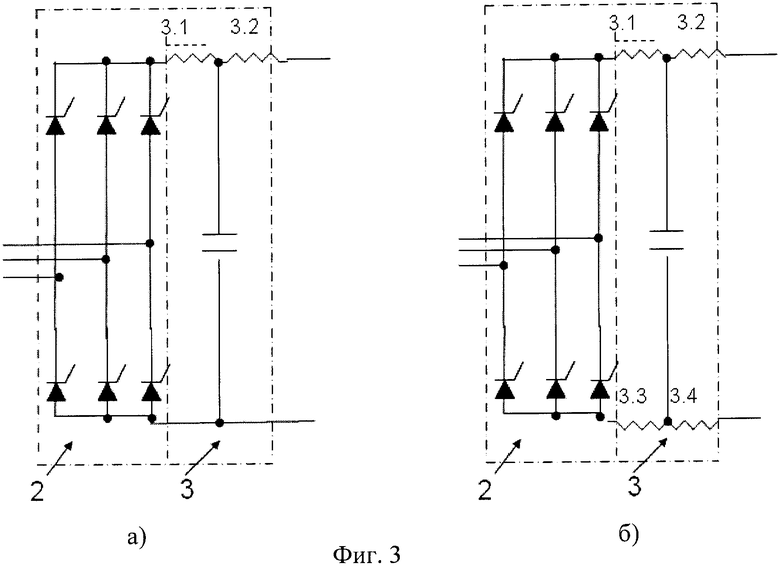
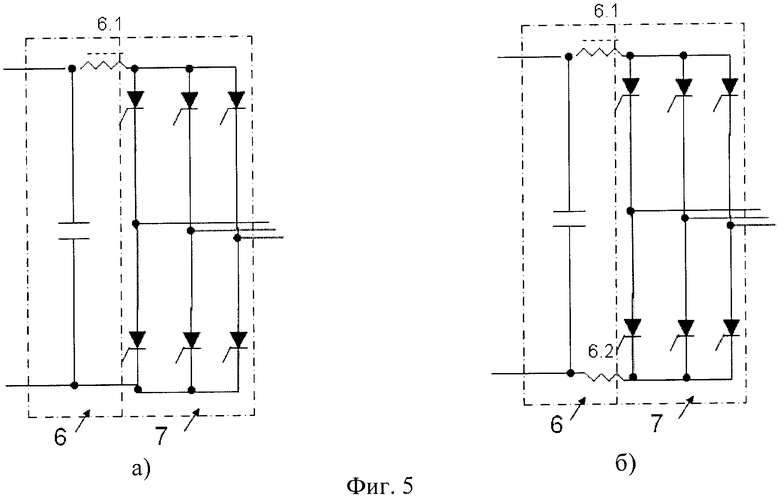
Кроме этого, в начальный момент подачи ПЗВ будет сформирован сигнал сброса, поступающий на соответствующий вход функционального релейного усилителя 11 с памятью (на фиг.1 не показан). В свою очередь срабатывание релейного усилителя 11 приведет к формированию сигналов запуска в каждой фазе каналов управления по цепи последовательно соединенных триггера 12, дифференцирующей схемы 13 и формирователя импульсов 14. На фиг.2 приведен пример реализации формирователя импульсов 14, согласно которой на выходе одновибратора 14.1а короткий импульс приведет к коммутации обмоток электродвигателя к источнику сетевого напряжения через управляемый выпрямитель 2, первый фильтр постоянного напряжения 3 и автономный инвертор 4. На фиг.3,а приведен пример реализации управляемого выпрямителя 2 (см. фиг.3,а) с Г-образным сглаживающим фильтром или фильтром постоянного напряжения 3, предназначенного для питания основной группы управляемых вентилей автономного инвертора 4. На фиг.4 приведен пример реализации группы неуправляемых вентилей обратного тока 5, которые могут быть соединены через Г-образный сглаживающий фильтр или второй фильтр постоянного напряжения 6 к зависимому или обратному инвертору 7 (см. фиг.5, а), выполняющему роль источника противо-э.д.с., обладающего обратной проводимостью. На приведенной принципиальной схеме (см. фиг.4) показана реализация автономного инвертора 4 с коммутирующим звеном из конденсаторов 4.1, отсекающих диодов 4.2. В данной реализации схемы преобразователя частоты принципиально могут быть использованы инверторы с другими коммутирующими звеньями - индивидуальными, общими на фазу, общими для анодной и катодной групп вентилей инвертора, общими для инвертора. Данная реализация не ведет к образованию потенциальной связи входов переменного тока управляемого выпрямителя 2 и обратного инвертора 7 и не вызывает необходимости разделения индуктивностей 3.1, 3.2, 6.1 (см. фиг.3,а и 5,а). При питании звеньев преобразователя частоты 2 и 7 от общих знаков (фиг.1) индуктивности должны быть рассредоточены на индуктивности 3.1-3.4 и 6.1-6.2 (см. фиг.3,б и 5,б), расположенные в анодной и катодной группах вентилей для обеспечения симметричной работы этих групп.
При регулировании выходной частоты преобразователя изменение выходного напряжения в соответствии с законом частотного регулирования осуществляется одновременным согласованным изменением углов управления вентилями выпрямителя и обратного инвертора - α и β, Г-образные сглаживающие фильтры 3 и 6 не препятствуют колебаниям мгновенных значений постоянных токов вентильных групп автономного и обратного инверторов.
Основные преимущества приведенного примера сводятся к следующим:
1) обеспечение режима рекуперативного торможения регулируемого привода и генераторного режима работы асинхронных двигателей силовых гиростабилизаторов при отсутствии переключений в силовой цепи преобразователя и в цепях управления;
2) отсутствие циркуляции уравнительных токов между управляемым выпрямителем и зависимым инвертором;
3) преобразователь частоты обладает лучшим быстродействием при переводе нагрузки из одного режима в другой вследствие непрерывности работы вентильных групп и постоянства направления токов в индуктивностях сглаживающих фильтров;
4) промежуточные цепи постоянного тока в данной схеме более уравновешены, чем в других известных схемах, что позволяет уменьшить емкость сглаживающих фильтров, соответственно и массу всей системы стабилизации;
5) при выполнении оконечного инвертора с наиболее простым коммутирующим звеном из конденсаторов, малой индуктивности и отсекающих диодов в схеме инвертора не образуются послекоммутационные короткозамкнутые контуры, в которых в известных схемах циркулирует начальный ток индуктивности.
Здесь и далее для упрощения пояснений следует рассматривать процесс формирования управляющих воздействий на примере формирования сигнала управления в одной фазе, т.к. это процесс справедлив для каждой фазы в отдельности.
Управление тиристорами управляемого выпрямителя 2 (см. фиг.1) осуществляется с помощью блока 15 управления выпрямителя с диапазоном фазового управления 180 эл. град, тиристорами автономного инвертора 4 - блоком 17 управления автономного инвертора тока и блока 18 управления обратного инвертора - тиристорами обратного инвертора 7. Блок 16 регулирования реализует заданный закон частотного управления электроприводом. Блок 19 питания осуществляет подачу необходимых напряжений для питания блоков 15-18 управления тиристорами автономного и обратного инверторов и блока 16 регулирования. Система регулирования, включающая блоки 15, 17 и 18 управления тиристорами и блок 17 регулирования, обеспечивает двигательный и генераторный режимы работы электромашинной нагрузки с рекуперацией энергии в сеть путем перевода управляемого выпрямителя в режим инвертора, ведомого сетью, а автономного инвертора - в режим компенсированного выпрямителя.
Таким образом, основные преимущества приведенных примеров реализации предлагаемого способа сводятся к следующим:
обеспечение режима рекуперативного торможения регулируемого привода и генераторного режима работы асинхронных двигателей силовых гиростабилизаторов при отсутствии переключений в силовой цепи преобразователя и в цепях управления;
отсутствие циркуляции уравнительных токов между управляемым выпрямителем и зависимым инвертором;
преобразователь частоты обладает лучшим быстродействием при переводе нагрузки из одного режима в другой вследствие непрерывности работы вентильных групп и постоянства направления токов в индуктивностях сглаживающих фильтров;
промежуточные цепи постоянного тока в данной схеме более уравновешены, чем в других известных схемах, что позволяет уменьшить емкость сглаживающих фильтров, соответственно и массу всей системы стабилизации;
при выполнении оконечного инвертора с наиболее простым коммутирующим звеном из конденсаторов, малой индуктивности и отсекающих диодов в схеме инвертора не образуются послекоммутационные короткозамкнутые контуры, в которых в известных схемах циркулирует начальный ток индуктивности.
При этом для случая, когда dE(t)/dt=0, за счет запоминания предшествующего состояния выходной величины релейного элемента Upэ(I-1), для всех E(t)∈(-a1, a1), где |2а1|≤&Тр - величина требуемой (заданной) точности отработки ПЗВ, устраняется возможность потери информации о сигнале ошибки до момента входа в зону нечувствительности или гистерезиса функционального релейного усилителя с памятью, что поясняет эффект повышения точности отработки ПЗВ в режиме отработки малых изменений E(t) без необходимости вычислять производную от изменения сигнала ошибки. При этом угол проводимости тиристоров в каждой фазе будет функционально связан с текущими значениями основных показателей качества отработки программно-задающих воздействий. Степень функциональных связей можно раздельно установить для каждого канала управления как перед включением в работу системы, так и непосредственно во время обработки, например, каждой "ступеньки" программно-задающих воздействий. Вышеописанные возможности во многих практически важных случаях программного управления электроприводами силовых гиростабилизаторов с точки зрения упрощения процесса настройки и оптимизации режимов регулирования (например, плавности переходных процессов при пуске за счет уменьшения интенсивности электромагнитных процессов) выгодно отличают систему от известных технических решений. При этом выходное напряжение питания инвертора (подаваемое на обмотки двигателя) стабилизируется. Этим однозначно задается величина потока возбуждения машины, а следовательно, и величина развиваемого ею момента,
Таким образом, уменьшается нестабильность скорости и момента двигателя при изменении напряжения питания, температуры окружающей среды. Здесь следует отметить, что остается нестабильность момента, вызываемая изменением параметров двигателя при нагреве или изменении окружающей температуры. Однако эта нестабильность находится в интервале (3-5%), так, например, диапазон изменения окружающей температуры гиростабилизаторов искусственных спутников Земли, размещаемых в гермоконтейнере, обычно находится в интервале (0-40°С), а собственный перегрев асинхронного двигателя мал из-за слабого использования его активных частей.
Источники информации
1. Бертинов А.И. Электрические машины авиационной автоматики. М.: Оборонгиз, 1961, 428 с. С.144-161.
2. Сергеев М.М. Наземные гироскопы. М.: Машиностроение, 1969, 232 с., с.93-99.
3. Шепелев Н.И. Сборка, регулировка и испытание гироскопических приборов. М.: Машиностроение, 1977, 192 с., с.153-170.
4. Ягодкин В.В., Хлебников Г.А. Гироскопические приборы баллистических ракет. М.: Военное издание, 1967, 216 с., с.54-77.
5. Матвеев С.С. Гирокомпасы и гирогоризонткомпасы. Л.: Судостроение, 1974, 352 с., с.102-106.
6. Меркин Д.Р. Гироскопические системы. М.: Физматлит, 1974, 344 с., с.244-256.
7. Петров Б.Н. Избранные труды. Управление авиационными и космическими аппаратами, т.2., М.: Наука, 1983 г., с.303-305, G01С 21/00.
8. Military Technology. Бонн (DE), Monch Publishing Group, t. 17, N 7, 1994, с.20, 21.
9. RU 2099665 C1 (Военная академия противовоздушной обороны им.Маршала Советского Союза Жукова Г.К) 20.12.1997 F41G 7/22.
10. Журнал "Ракетная техника и космонавтика", т.18, №2, февраль 1980 г., "Мир", М., стр.128-138.
11. RU 2044274 C1 (Производственное объединение "Корпус") 20.09.1995, G01C 25/00. Стенд для контроля прецизионного гироскопического датчика угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И. (Россия). Зарегистрир. в Гос. реестре изобр. 20.09.95. // БИ 1995.
12. Калихман Д.М. Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2001. - 336 с.
13. Калихман Д.М. Одноосное управляемое основание с датчиком угловой скорости в качестве чувствительного элемента, находящегося в режиме самоконтроля // Изв. вузов. Приборостроение. 2001. - №1, Т.44. - С.30-34.
14. SU 476516, Кл. G01P 13/00, 1973.
15. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
16. Высокоточные преобразователи угловых перемещений. / Под ред. А.А.Ахметжанова. - М.: Энергоатомиздат, 1986.
17. Калихман Д.М. Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2001. - 336 с.
18. Калихман Д.М. Одноосное управляемое основание с датчиком угловой скорости в качестве чувствительного элемента, находящегося в режиме самоконтроля // Изв. вузов. Приборостроение. 2001. - №1, Т.44. - С.30-34.
19. RU 2044274, приоритет от 27.05.1992. Стенд для контроля прецизионного гироскопического датчика угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И. (Россия). Зарегистрир. в Гос. реестре изобр. 20.09.95. // БИ 1995.
20. RU 2075042, приоритет от 11.05.1993. Устройство для контроля датчиков угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин, В.И., Сновалев А.Я., Чурилин Ю.С. (Россия). Зарегистрир. в Гос. реестре изобр. 10.03.97. // БИ 1997.
21. Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 248 с.
22. SU 399785 А1 (Василевский П.Ф.) 01.01.1973, G01P 13/00.
23. RU 2208764 С1 (ФГУП Центральный научно-исследовательский институт "Электроприбор") 20.07.2003, G01C 19/24.
24. Гуревич С.С. и др. Система ориентации орбитальных космических аппаратов на базе бескарданных электростатических гироскопов со сплошным ротором. VIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. - С.-Пб.: ГНЦ РФ ЦНИИ "Электроприбор", 2001, с.52.
25. Малеев Г.И. Новые типы гироскопов. - Л.: Судостроение, 1971, с.18.
26. Гулиа Н.В. Динамическое аккумулирование и рекуперирование механической энергии для целей транспорта. Дисс. на соиск. учен. степени д-ра техн. наук. Курск, 1972, с.229-253.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Способ управления электродвигателем с вентильным преобразователем и устройство для его осуществления | 1990 |
|
SU1833956A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ГИБРИДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2557686C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДЕЙСТВИЙ СПОРТСМЕНА НА ДИСТАНЦИИ | 1992 |
|
RU2031679C1 |

Изобретение относится к области проектирования приборов систем навигации и может быть применено для управления асинхронными двигателями силовых гиростабилизаторов с изменяемым кинетическим моментом, применяемых, в частности, в системах ориентации искусственных спутников Земли. Технический результат - повышение точности и надежности. Для достижения данного результата устранена необходимость формирования и программного изменения частоты и выполнения операций суммирования частот. При этом предлагаемая совокупность признаков позволяет получить достаточно высокую стабильность абсолютного скольжения, а следовательно, скорости и момента двигателя. 5 ил.
Способ стабилизации скорости вращения силовых гиростабилизаторов, согласно которому на участках разгона и торможения асинхронного двигателя маховика силовых гиростабилизаторов во время первичного разгона маховика до номинальной скорости и стабилизации скорости вращения на основе разгона и рекуперативного торможения двигателя в ограниченных пределах изменения скорости относительно номинальной, а именно ±(10÷40)% от номинальной, дополнительно осуществляют измерение и нормирование величины сигналов (мгновенных значений) напряжений на выходе усилителей датчика скорости вращения и программно-задающего блока U1(t) и U2(t), при этом непрерывно корректируют величину зоны гистерезиса функционального релейного усилителя с памятью на основе следующих соотношений: |a1|=(k2/k1)U1(t) и -a1=-(k2/k1)U2(t), где k1 и k2 - коэффициенты усиления соответствующих усилителей сигналов датчика скорости вращения и программно-задающего блока, а на выходе функционального релейного усилителя с памятью формируют сигнал, который может быть описан следующей зависимостью:
sign E(t), при |E(t)|≥a1 для всех t>0;
Upэi=
Upэ(i-1), при E(t)∈(-a1, а1) для всех t>0;
где +1, при Е(t)>0;
sign E(t)=0, при E(t)=0;
-1, при Е(t)<0;
E (t) - сигнал ошибки, E(t)=(U1(t)-U2(t))Kф(t), Кф(t) - коэффициент усиления, U1(t) и U2(t) - нормированные величины измеренных значений (мгновенных) напряжений на выходе усилителей датчика скорости вращения и программно-задающего блока,
2*а1 - величина зоны гистерезиса функционального релейного усилителя с памятью, |a1|=(k2/k1)U1(t) и -a1=-(k2/k1)U2(t), в начале поступления каждого программно-задающего воздействия обнуляют сигнал на выходе функционального релейного усилителя с памятью.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| УСТРОЙСТВО ИМПУЛЬСНО-КЛЮЧЕВОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2249296C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| GB 1106370 A, 13.03.1968. | |||

