Предлагаемый способ защиты от имитационных помех относится к области радиосвязи и может быть использован для защиты от имитационных помех, создаваемых радиосредствами радиопротиводействия, при приеме информации радиоприемными узлами связи.
Имитационная помеха представляет собой тот или иной сигнал, по структуре совпадающий с соответствующими сигналами из числа используемых в системе радиосвязи. Ввиду этого борьба с такими помехами является трудной из-за трудности отличить ее от сигналов собственного корреспондента. Задача распознавания сигналов собственного корреспондента от имитационной помехи известна в радиосвязи и в радиолокации как задача опознавания "свой-чужой". Для создания имитационных помех достаточно иметь записанные сигналы, полученные приемом из пространства или другим путем, причем дешифрация таких сигналов может быть и необязательной. В системах радиосвязи, в которых передаются командные сигналы управления, имитационная помеха дезорганизует работу исполнительных устройств или исполнителей, так как принимается ложная информация при отсутствии излучения собственных корреспондентов. С целью борьбы с имитационными помехами меняют в соответствующее время структуру сигналов (код), передачу информации ведут имита-стойкими сигналами, сообщают при излучении информации время излучения с последующей проверкой времени излучения с текущим временем приема по критерию превышения разницы указанных времен некоторой величины.
Однако имитационная помеха может быть сформирована из принятого сигнала корреспондента с последующим излучением. В этом случае знание шифра кода оказывается ненужным. Поэтому для отличия сигналов собственного корреспондента от имитационной помехи на приемный пункт корреспондент сообщает время излучения, что позволяет отличать имитационную помеху, излученную позднее сигналов корреспондента. Но при передаче информации о времени излучения успех дела зависит от знания шифра кода противником. Если код расшифрован каким угодно способом, то противник имеет возможность излучать ложную информацию, сообщая время излучения. Кроме того, применение криптоустойчивых кодов увеличивает вес, габариты, энергопотребление аппаратуры связи, что не желательно для военной аппаратуры подвижных систем связи. В связи с вышеизложенным возникает необходимость иметь способы защиты от имитационных помех, страхующие в случае раскрытия шифров кодов или позволяющие при необходимости обходиться обычными не криптоустойчивыми кодами.
В качестве прототипа взят метод защиты от имитационных помех, изложенный в патенте США №4077005 от 28.2.1978 г. кл. Н 04 К 1/00 "Система обеспечения идентификации местоположения и времени передачи", структурная схема которой приведена на фиг.1.
Блок 1 представляет собой судовую аппаратуру, блок 2 - бортовую аппаратуру, блок 3 - аппаратуру геостационарного спутника, блок 4 - аппаратуру спутника с изменением положения (на низкой высоте), блок 5 - наземную аппаратуру распознавания, которая распознает самолеты или суда на прямых ВЧ линиях, блок 6 - наземную аппаратуру распознавания, которая использует спутник (стационарный или с переменным положением) для распознавания судов или самолетов.
Индивидуальное кодовое слово Is, присвоенное кораблю, запоминается регистром 47. Положение корабля Р определяется с точностью ±2 км (хотя может использоваться более высокая точность) с помощью судовой навигационной аппаратуры 48 в течение дня T1, когда каждое сообщение, производимое кораблем, определяется хронометром 49. Система анализа выдает 13-ти битовое бинарное сообщение, которое соответствует Is, 16-ти битовое сообщение, соответствующее Р, и 17-ти битовое сообщение, соответствующее T1. Предполагается точность времени ±1 сек. в течение 24-х часов, т.е. времени, предложенного для использования каждого криптографического ключа. Множество применений этого ключа может обеспечиваться менее жесткими временными точностями.
Эти три бинарных сообщения Is, P, T1, складываются, давая 46-ти битовое сообщение, которое обозначается как Is+Р+T1. Это 46-ти битовое сообщение шифруется шифровальной аппаратурой 11, которая использует современный шифровальный код, содержащийся в шифровальном ключе 12 для обеспечения зашифровки сообщения С (Is+P+T1), которое затем передается судовым передатчиком 10. Для удобства это обозначение запишем как Mus=C(Is+P+T1).
Сообщение самолета воспроизводится точно таким же путем, с помощью IA, кодового слова, присвоенного самолету вместо Is. Блоки 13-18 выполняют те же функции соответственно для самолета, как блоки 47-49 и 10-12 выполняют это для судов.
Зашифрованное сообщение Мus принимается приемником геостационарного спутника 19. Каждый прием во времени такого сообщения выполняется приемником 19, триггер посылает на хронометр спутника 20 сигнал, вызывая тем самым посылку сообщения во времени дня Т2 (17-ти битовое бинарное сообщение) на передатчик 21. Зашифрованное сообщение Mus также передается на передатчик 21. Передатчик 21 добавляет бинарное сообщение Т2 к МUS, чтобы получить 63-и битовое бинарное сообщение МDF, иными словами
MDF=Mus+T2; MDF=C(Is+P+T1)+T2.
Передатчик 21 затем передает сообщение MDF на землю или на поверхностный приемник распознавания 34.
Зашифрованное сообщение MUS может быть также принято приемником 22 спутника с переменным местоположением. Приемник 22 после приема сообщения Мus посылает триггерную посылку на хронометр 23, который затем посылает время дня Т2 на формулятор сообщения 24. Приемник 22 также посылает зашифрованное сообщение Мus на формулятор сообщения 24. Формулятор сообщения 24 посылает суммарное сообщение C(Is+P+T1)+Т. на блок памяти 25, где обрабатывается в течение времени Δ до тех пор, пока спутник с переменным местоположением находится в пределах зоны действия наземного терминала распознавания. Сообщение С(Is+P+T1)+T2 затем передается передатчиком 26. Это задержанное сообщение представляется как
MDF=Δ(C(Is+P+T1)+T2).
Если MuA - принимается любым спутником вместо Mus, то производится та же операция для получения
MDF=C(Is+P+T1)+T2 и MDF=Δ(C(IA+P+T1)+T2). соответственно.
Сообщение MDF или MDY принимается наземным терминалом распознавания, т.е. приемник 34, который посылает это сообщение на дешифрирующий блок 35. Дешифрирующий блок использует ключевую информацию от шифрируемого ключа 36 (равно как от 12 и 18) для расшифровки зашифрованной части сообщений MDF или MDY, таким образом, воспроизводит сообщение Is+P+T1+T2 (или IA+P+T1+T2 для самолета). Это сообщение затем посылается на подтвердитель 37, который сравнивает Т1 и T2, чтобы заметить разницу |T2-T1|≤Tмs, где Tмs - максимальная временная разность, допустимая при передаче с кораблей (3 сек. при точности ±1 сек. допустимая здесь для T1 и Т2) или чтобы замерять |Т2-T1|≤Tмs (или TмА для самолетов), а затем сообщение Is+P+T1, обозначающее положение Р корабля, кодовым словом которого является Is в момент T1, посылается на дисплей 38, где оно может быть коррелированно целями, отраженными на дисплее процессором 39 по данным других датчиков. Корабли и самолеты могут также распознаваться этой системой без использования спутников, если терминал распознавания находится непосредственно в ВЧ зоне распознаваемого транспортного средства. В этом случае сообщение Мus и МuA готовятся и передаются только таким же образом, как было описано ранее, но эти сообщения посылаются непосредственно на приемник 27 наземного терминала распознавания.
Приемник 27 после приема сообщения Mus или MuA посылает триггерную посылку на хронометр 28, который затем посылает время для Т2 непосредственно на подтвердитель 31. Приемник 27 также посылает зашифрованное сообщение Mus и МuA на дешифратор 29, который использует ключевую информацию от шифратора 30 (точно такую же как от 12 и 18 для расшифровки сообщения). Затем он посылает расшифрованное сообщение Is+P+T (или IA+P+T1) на подтвердитель 31, который сравнивает Т1 и Т2 так же, как это описано для подтвердителя 37. Если Is+P+T1 (или IA+P+T1) посылается в дисплей 32, то он там коррелируется с целями, полученными от других датчиков 33, например, радара. Способ, по которому двоичные сообщения передаются и принимаются опущен в данном описании, поскольку в данном изобретении не ставилась цель описания передачи и приема за исключением того, что передача бинарной информации должна быть надежной. Кроме того, опущены подробности относительно действующей шифровальной системы, поскольку могут быть использованы любые существующие шифровальные и дешифровальные системы. Людям, искушенным в этой области, для передачи 46-и битовых бинарных сообщений нет проблем. Система идентификации местоположения и времени передачи не обязательно должна использовать предложенную точность передачи ±1 сек. ВЧ передачи могут вестись широкополосными методами и с помощью направленных антенн. Фактически все новые разработки в технологии связи можно применять к данной системе, поскольку она использует обычные (засекреченные) линии связи для передачи своих сообщений.
Следует отметить, что временной интервал между сообщениями не зависит от разности времен T1 и Т2, а от скорости изменения координат объектов передачи и приема, иными словами самолет, положение которого меняется значительно в течение одной секунды, делает множество сообщений о своем положении и опознается в течение 1-й секунды, в то время как суда, которые изменят положение за 1 секунду мало, могут опознаваться всего несколько раз в час, или реже.
Как видно из описания работы прототипа в нем для опознавания информации своего корреспондента используется следующие действия:
1) передаются адрес (шифр) корреспондента и время излучения, которые при трансляции через спутники дополняются информацией о времени излучения спутника;
2) информация (координаты, объекта) кодируется криптоустойчивым кодом;
3) проверяется разница времен излучения информации с судов или самолетов, и спутников на соответствие допустимой разнице, а также разница времен излучения и приема при прямой передаче на аналогичное соответствие;
4) принятая радиоприемником информация расшифровывается и используется по назначению.
5) коррелировано целями, отраженными на дисплее процессором.
Описанный способ обладает следующими недостатками:
эффективность способа зависит также от криптоустойчивости кода и его скрытия (засекречивания). Знание противником шифра кода практически полностью обесценивает способ, так как излучатель помехи в этом случае имеет возможность с того или иного расположения передавать шифрованные сигналы с информацией о соответствующих временах излучения сигналов, которые приемной аппаратурой воспринимаются как сигналы собственного корреспондента, а также передавать ложную информацию о местонахождении корреспондента;
применение криптоустойчивых сигналов удерживает аппаратуру связи, увеличивает ее вес, габариты, энергопотребление, что нежелательно, причем эти характеристики по показателям возрастают с увеличением криптоустойчивости шифра.
Существенным недостатком метода опознавания информации прототипа является необходимость выдерживать достаточно точно единое время у корреспондентов. Нарушение синхронизма времени приводит или к возможности приема ложной информации, или к пропуску информации собственного корреспондента. Обозначим время наземного приемного центра (наземного терминала) через t1, а подвижного корреспондента через t2. Тогда разница во времени t1-t2>0 будет восприниматься на приемном центре как задержка сигналов корреспондента, а разница t1-t2<0 - как опережение. При превышении задержки сигналов определенного (порогового) значения приемный центр будет воспринимать информацию собственного корреспондента как чужую, а в случае опережения информация чужой радиостанции будет восприниматься как информация собственного корреспондента. Таким образом, в обоих случаях возникает ошибка.
Кроме того способ прототипа требует затрат времени и загрузки информационного канала для передачи сигналов о времени излучения информации, что снижает быстроту передачи информации.
Целью изобретения является повышение достоверности приема информации собственных корреспондентов при воздействии имитационных помех чужих сигналов без синхронизации по единому времени.
Эта цель достигается тем, что по оцененному азимуту приход сигнала соответствующей приемной аппаратурой и проверенному на соответствие азимуту по данным расположения переданным корреспондентом выравнивается время прохождения сигналов от корреспондента через антенны на соответствующие выходы радиоприемников, а возникающий в последующее время после выравнивания сигнал несоответствия азимута принимаемой имитационной или другой помехи азимуту сигналов корреспондента используется для блокировки информации с радиоприемников на исполнительную аппаратуру или оператору на все время сеанса связи.
Для этого применяется связь широкополосными последовательными или параллельно-последовательными сигналами с приемом на два и более радиоприемника с круговыми диаграммами направленности антеннами, разнесенными в пространстве. Длина и азимут прямой их соединения (база антенны) предварительно измеряются и в виде сигналов вводятся в память микропроцессора.
Собственный корреспондент сообщает в начале сеанса связи помимо адресных сигналов вызываемого корреспондента и себя еще и топографические координаты своего расположения, например с помощью топографической карты, которые вводятся на передвижных приемных концах в память микропроцессора. Последний по программам, имеющимся в памяти его, вырабатывает сигнал азимута корреспондента по отношению к прямой соединения антенн, а по оцененному времени запаздывания сигналов от антенн по отношению друг к другу, вырабатывает сигнал оцененного азимута по отношению к той же прямой. Оба сигнала азимутов сличаются на соответствие допустимому расхождению и если обнаруживается соответствие, то микропроцессор вырабатывает сигнал для выравнивания запаздывания по трактам приема, который подается на соответствующий блок задержки сигналов. Если обнаруживается расхождение, то вызов игнорируется, информация на исполнительное устройство или оператору блокируется.
Если запаздывание сигналов по трактам приема выровнено в соответствии с азимутом корреспондента, то любая помеха с другим азимутом будет вызывать появление сигнала несоответствия азимута прихода помехи и азимута корреспондента, который служит для блокировки информации с выходов радиоприемной аппаратуры. Это состояние сохраняется до тех пор, пока от собственного корреспондента не появится служебный сигнал окончания связи. После чего аппаратура возвращается в исходное состояние.
Стратегия обмена информацией учитывает то, что частота излучения корреспондента заранее не известна противнику и требуется некоторое время, чтобы определить частоту излучения корреспондента и создать соответствующую помеху. За это время приемное устройство, заранее настроенное на частоту приема, успевает принять информацию и выполнить соответствующие действия.
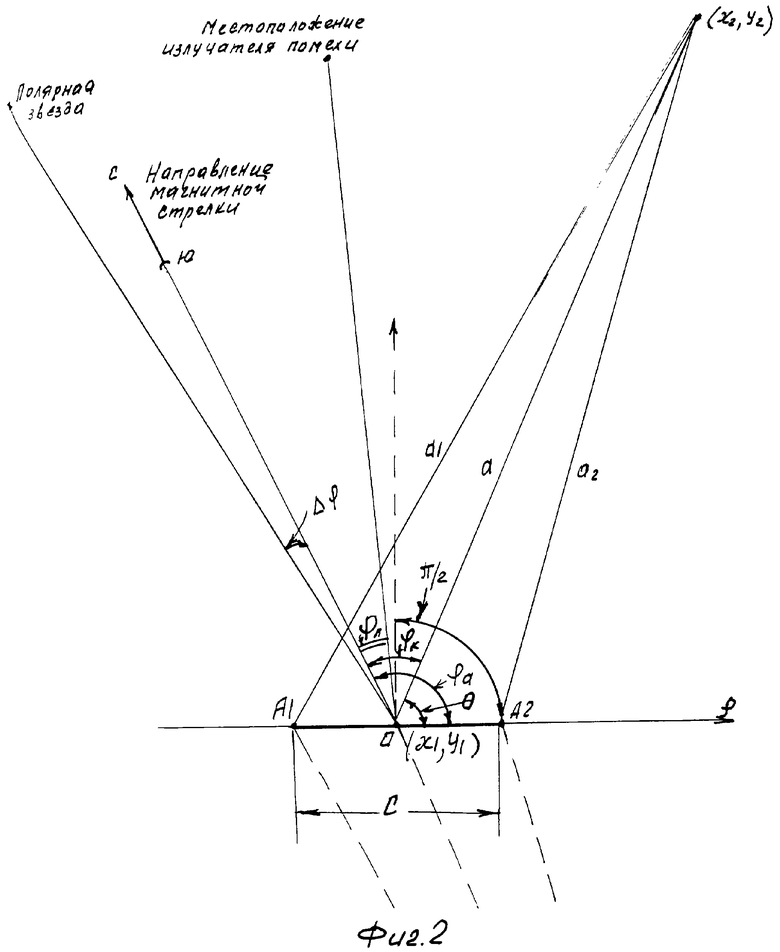
Вышеизложенное поясняется графически ниже. На фиг.2 показано условно расположение корреспондента с топографическими координатами (х2, у2) и азимутом ϕк, прямой С соединения антенн A1, A2, причем середина прямой идентифицирована с местоположением приемника с координатами (х1, у1). Азимут прямой представляет собой наибольший угол между прямой и направлением магнитной стрелки взятый со знаком "+", если перпендикуляр к ней повернут по часовой стрелке от направления магнитной стрелки и со знаком "-", если против.
Если корреспондентом переданы координаты своего расположения и известны координаты расположения радиоприемника, то азимут корреспондента можно вычислить по формуле
где Δϕ - магнитное склонение, представляющее угол между направлением магнитной стрелки и проекцией на плоскость горизонта направления на полярную звезду и приводимое в топографических картах.
Угол θ между прямой соединения антенн и направлением на корреспондента определится формулой

Так как длина прямых a1, a2, "a" намного больше С, то углы между ними и прямой С практически равны. Поэтому разница в пути прохождения сигналов от корреспондента к антеннам A1; A2 определяется формулой: Δа≅с cos θ, а время запаздывания Δt формулой: Δt=Δa/V=C cos θ/V, где V - скорость электромагнитных волн в земной пространстве. Если δt - длительность элементарного сигнала, из которых формируется последовательный широкополосный сигнал, то эта задержка определится в n=Δt/δt штук элементарных сигналов. (О применении широколосных сигналов для оценки азимутов см. Р.К.Диксон. Широкополосные системы. М. "Связь", 1979 г., с.254-260).
По времени запаздывания можно вычислить угол
θ=arc cos Δt·V/c=arc cos δt·n·V/c
Таким образом, с одной стороны θ можно вычислить по координатам корреспондента, а с другой стороны оценить аппаратурно и оба значения сравнить на соответствие наибольшему расхождению между ними.
Структурная схема устройства, работающая по предлагаемому методу, приведена на фиг.3, где обозначено: A1, A2 - антенны; 1а, 1б - приемники широкополосных сигналов (корреляционные приемники), 2а, 2б - блоки запаздывания; 3а, 3б - блоки выделения посылок; 4а, 4б - декодеры; 5 - блок оценки запаздывания, 6 - формирователь сигналов блокировки, 7 - блок памяти, 8 - блок сложения сигналов, 9 - ключ, 10 - первый кодопреобразователь, 11 - микропроцессор, 12 - второй кодопреобразователь, 13 - генератор тактовых импульсов, 14 - блок ввода информации.
Устройство состоит из двух последовательных соединений антенны с блоками 1, 2, 3, 4, 5. Блок 8 по первым двум входам соединен с выходами блоков 4а, 4б и совместно с блоками 10, 11, 12, 7 образует последовательное соединение, причем вторые входы блоков 2а, 2б соединены с блоком 7. Блоки 6, 11 соединены с выходом блока 5, блок 9 по первому входу соединен с блоком 6, по второму -с блоком 8. Блок 11 по третьему входу соединен с блоком 14. По соответствующим входам блоки 5, 6, 7, 11, 8 соединены с блоком 13.
Приемники 1а, 1б совместно с антеннами А1, А2 предназначены для приема широкополосных сигналов последовательного типа и по существу представляют собой корреляционный приемник. Блоки 2а, 2б представляют собой, например, сдвиговые регистры, служащие для задержки сигналов, с элементов (триггеров) которых через соответствующие, управляемые с блока 7 ключи подаются сигналы на выход. Элементарное время задержки равно деятельности элементарного сигнала, а полное время задержки определяется числом триггеров, отсчитанных с первого, на который подается сигнал с блока 1 и триггером, с которого снимается через ключ сигналы на выход. Время задержки в блоках 2а, 2б устанавливается так, чтобы сигналы с этих блоков при приеме сигналов собственного корреспондента появлялись одновременно. С помощью сдвиговых регистров установку одновременности появления сигналов о блоков 2а, 2б можно осуществить с точностью не хуже продолжительности одного элементарного широкополосного сигнала. Указанную одновременность можно осуществить, если соответствующей задержке сигналов в антенне по отношению к другой антенне осуществить соответствующую задержку в регистре в тракте с антенной, на которую приходит опережающий сигнал.
Блоки выделения посылок 3а, 3б предназначены для выделения токовых посылок из последовательностей широкополосных сигналов. Эти токовые посылки образуют кодовые последовательности, которые декодируются декодерами 4а, 4б. Блок 5 оценки запаздывания, вариант которого будет описан ниже, предназначены для формирования сигнала временной задержки, который соответствует времени задержки прихода сигнала на одну из антенн по отношению к другой.
Формирователь сигнала блокировки 6 предназначен для формирования сигнала блокировки из сигнала временной задержки блока 5 и сигнала с микропроцессора 11 на ключ 9, задача которого состоит в пропуске сигналов по командам с блока 6. Ключ открывается тогда, когда микропроцессором 11 будут идентифицированы сигналы адресования корреспондента и установлена соответствующая задержка в блоке 2а или 2б. После этих операций из появляющихся сигналов блока 5 и сигнала с блока 11 формируется в блоке 6 запрещающийся сигнал на ключ 9. Блок сложения сигналов 8 предназначен для сложения сигналов с блоков 4а и 4б. Первый кодопреобразователь предназначен для преобразования сигналов с блока 8 в сигналы микропроцессора 11.
Микропроцессор 11 предназначен для проведения вычислительных операций, операций индентифицирования сигналов, формирования сигналов включения соответствующих ключей в блоках 2а, 2б. Он включает в себя субблоки памяти, ввода-вывода, арифметико-логическое устройство, блок управления.
Второй кодопреобразователь 12 предназначен для преобразования сигналов (кодов) микропроцессора 8 сигналы управления ключами блоков 2а, 2б. Эти сигналы запоминаются в блоке памяти 7, который по существу представляет собой регистр в который сигналы вводятся за короткое время, а снимаются в блоки 2а, 2б непрерывно. Генератор тактовых импульсов 13 предназначен для формирования тактовых импульсов для соответствующих блоков. Блок ввода информации 14 предназначен для формирования сигналов соответствующей информации и ввода их в память микропроцессора. Он представляет собой кнопочную клавиатуру (тастатуру) с соответствующими узлами фильтрации дребезговых сигналов, состоящими, например, из триггеров или логичных узлов.
Устройство работает так: сигналы координат приемников, длина прямой соединения антенн, азимут антенны, поправка на магнитное склонение, адреса корреспондентов и собственный адрес вводятся в память микропроцессора 11 оператором с помощью блока 14. Корреспондент изучает сигнал вызываемого корреспондента, т.е. станций расположения рассматриваемого устройства, сигнал собственного адреса, координаты своего расположения на частоте излучения, которая заранее не известна противнику.
Поскольку соответствующим приемным устройствам противника требуется время на настройку на частоту излучения корреспондента и определения этой частоты, то за это время рассматриваемым устройством будут приняты сигналы адресования, координаты своего расположения. Воспринятые антеннами A1, A2 сигналы корреспондента усиливаются и преобразовываются блоками 1а, 1б в токовые посылки высокой частоты следования без задержки в блоках 2а, 2б подаются в блоки 3а, 3б, где из них выделяются токовые посылки кодовых последовательностей, которые подаются в блоки 4а, 4б где эти последовательности декодируются и получающиеся сигналы подаются в блоки 5 и 8. Для операций в блоках 3а, 3б, 4а, 4б используются сигналы синхронизации блоков 1а, 1б соответственно. В блоке 8 сигналы соответствующим образом складываются. Сформированные таким сложением сигналы преобразуются кодопреобразователем 10 в сигналы удобные для микропроцессора 11, куда они подаются.
В блоке из сигналов с блоков 4а, 4б формируются сигналы запаздывания сигналов, поступающих в антенну 1 или в антенну 2. Соответственно этому с блока 5 сигналы запаздывания в блок 11 поступают по двум проводам - сигналы одного провода соответствуют запаздыванию сигнала антенны A1, а другого - антенны А2. Если запаздывания не обнаруживается, то по третьему проводу в блок 11 подается соответствующий сигнал.
Микропроцесс по соответствующим программам идентифицирует принятые сигналы адресования с имеющимися в его памяти, вычисляет магнитный азимут вызывающего корреспондента по его координатам, вычисляет магнитный азимут по сигналу запаздывания с блока 5, сравнивает полученные результаты вычисления. Если с известной точностью азимуты совпадают и адреса идентифицируются, то микропроцессор формирует сигнал на включение соответствующей задержки сигнала в блоке 2а или 2б. Этот сигнал преобразуется кодопреобразователем 12 и соответственно включению ключа блока 2а или 2б подается на один из двух выходов в блок 7, где он запоминается и подается постоянно до поступления нового сигнала на соответствующий ключ блока 2а, 2б. В результате включения этого ключа сигналы собственного корреспондента по времени появления с блоков 2а, 2б выравниваются. Одновременно с подачей сигнала на ключ в блоке 2а или 2б с блока 11 подается сигнал в блок 6, где формируется сигнал на открытие ключа 9, до этого закрытого. В результате этих операций информация собственного корреспондента с блоков 4а, 4б складывается синхронно во времени в блоке 8 и подается на выход через блок 9 на исполнительное устройство или оператору. Если только теперь во время сеанса связи появляется имитационная помеха с расположением излучателя по азимуту отличному от азимута корреспондента, то выравнивание времен появления сигналов с блоков 2а, 2а и соответственно с блоков 4а, 4б будет нарушено, что отмечается блоком 5, сигнал с которого подается в блок 6 и в блок 11. В блоке по этому сигналу формируется сигнал, закрывающий ключ 9. В результате поступающая информация блокируется от оконечной аппаратуры или оператора. Такое состояние сохраняется до тех пор, пока не поступит сигнал окончания связи от корреспондента. По этому сигналу микропроцессор соответствующими сигналами переводит ключи блоков 2а, 2б и блок 6 в исходное состояние.
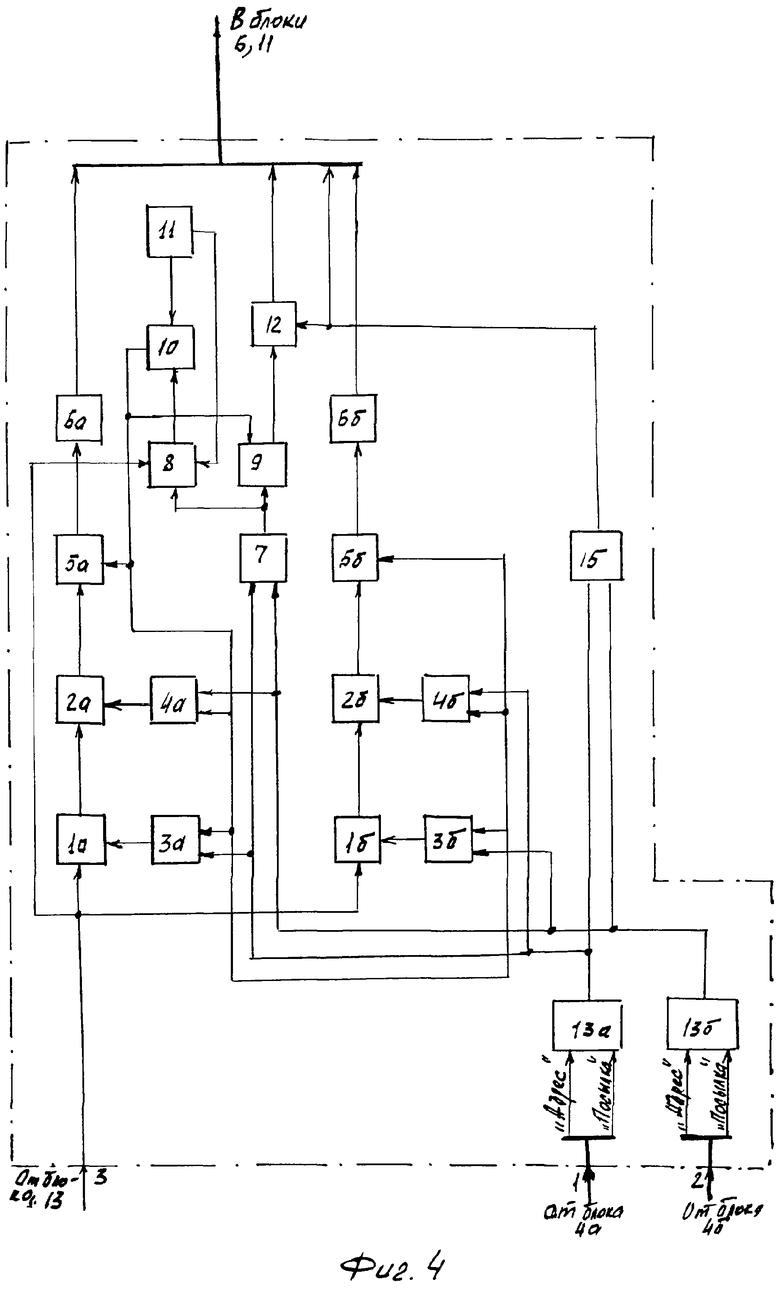
Структурная схема варианта блока оценки запаздывания приведена на фиг.4.
Сигналы адресования или посылки от блоков 4а, 4б подаются соответственно через 1-й и 2-й входы на схемы "ИЛИ" 13а, 13б соответственно. От блока 13 через третий вход подаются тактовые сигналы (импульсы) высокой частоты следования. Если сигнал с блока 13а появляется раньше сигнала с блока 13б, то этот сигнал подается на триггер 3а, опрокидывает его, сигнал этого триггера закрывает ключ 1а, до этого открытый. Кроме того, сигнал с блока 13а подается на триггер 4б, опрокидывает его. Сигнал этого триггера открывает ключ 2б. В результате тактовые импульсы с третьего входа через открытые ключи 1б, 2б подаются на счетчик 5б, сигналы с которого через буферный регистр 6б подаются на выход в блоки 6, 11. Запоздалый сигнал 13б подается на триггера 4а, 3б и опрокидывает их. Сигналы с этих триггеров соответственно закрывают ключ 2а и открывают ключ 3б. В результате чего подача импульсов в счетчик 5б прекращается. Аналогично производится ввод импульсов в счетчик 5а, кода раньше появляется сигнал со схемы 13б. Сигнал со счетчика 5а подается на выход через буферный регистр 6а. Появляющийся ранее сигнал со схемы 13а или 13б через схему "ИЛИ" 7 подается в таймер 8 и в блок памяти 9. Таймер по существу представляет собой счетчик импульсов от блока 13, который запускается от импульса со схемы 7 и по истечении подачи известного числа импульсов через схему "ИЛИ" 10 выдает сигнал сброса соответствующих триггеров и счетчиков в исходное состояние. Блок памяти представляет собой по существу триггер с двумя состояниями со счетным входом. Вторым импульсом этот триггер переводится в первоначальное состояние. Передний фронт сигнала этого триггера используется как сигнал записи, который через схему "ИЛИ" 12 подается на выход в блоки 6, 11. Если сигналы с блоков 13а и 13б появляются одновременно, то это отмечается схемой "И" 15, сигнал с которой через схему 12 подается на выход. Кроме того, сигнал со схемы 15 подается на выход как сигнал совпадения во времени сигналов. Генератором исходного состояния через схему 10, или непосредственно, соответствующие блоки переводятся в исходное состояние после подачи питания.
Как видно из изложенного заявляемый способ защиты от имитационных помех не требует единого времени, имитостойких сигналов, т.е. поставленная цель методом достигается, а сам метод схемно реализуем.
Технико-экономическая эффективность заявляемого способа заключается в том, что повышается достоверность приема информации от корреспондента при действии имитационных помех. Пусть, например, излучатель имитационной помехи может находиться с равной вероятностью в любом азимуте ϕ. Пусть разрешающая способность аппаратуры δϕ, т.е. излучатель помехи обнаруживается, если его азимут отличается от азимута корреспондента на δϕ и более. Учитывая зеркальное расположение излучателя помехи соединения антенн, отмечаем, что этот излучатель не обнаруживается в углах сумма которых равна 2δϕ+2δϕ=4δϕ. При равновероятном расположении излучателя плотность W(ϕ) вероятности расположения по азимуту равна  где π - известная постоянная, а вероятность его необнаружения равна
где π - известная постоянная, а вероятность его необнаружения равна

При этом вероятность обнаружить излучатель соответственно равна 
Отсюда видно, что, не применяя заявляемого способа, вероятность не обнаружить имитационную помеху равна единице, а с применением она уменьшается в  .
.
Разрешающая способность аппаратуры достигает 0,9°=15,7·10-3 рад. (см., например, Р.К.Диксон. Широкополосные системы. М. "Связь" 1979 г. с.257)
Поэтому можно записать
 т.е. в 100 раз.
т.е. в 100 раз.
Положительный эффект предлагаемого способа по отношению к способу прототипа достаточно легко рассчитать по величине вероятности ложной тревоги Pлт, определяющей в данном случае стойкость к воздействию структурной помехи.
Для прототипа Рлт зависит от степени синхронизма часов абонентов системы связи. Если синхронизм обеспечивается стабильностью опорных генераторов частот, а не с помощью приемника единого времени из некоторого центра (с точки зрения подвижных систем военной связи подобный приемник единого времени мало эффективен ввиду жесткой зависимости живучести всей системы связи от живучести центра), то получаем, что с течением времени  , так как только в половине случаев опорные генераторы будут иметь расхождение в разные стороны. Например, для стабильности генераторов порядка (1÷5)·10-6 и допустимом времени (t1-t2)=1с (этот верхний предел зависит от реакции противника на сигналы системы связи) получаем, что через 1÷5 суток часы разойдутся на величину 1с. Для предлагаемого способа Рлт не зависит от времени, а зависит от точности определения азимута передающего корреспондента на стороне абонента. Не трудно показать, что
, так как только в половине случаев опорные генераторы будут иметь расхождение в разные стороны. Например, для стабильности генераторов порядка (1÷5)·10-6 и допустимом времени (t1-t2)=1с (этот верхний предел зависит от реакции противника на сигналы системы связи) получаем, что через 1÷5 суток часы разойдутся на величину 1с. Для предлагаемого способа Рлт не зависит от времени, а зависит от точности определения азимута передающего корреспондента на стороне абонента. Не трудно показать, что
где: Δϕ1 - точность определения азимута с помощью разнесенных антенн,
Δϕ2 - точность определения азимута по сообщенным координатам корреспондента и собственным координатам абонента по формуле
где (ук, xк) - координаты корреспондента,
а (уа, xа) - координаты абонента.
Приняв точность Δϕ1Δϕ2=1÷10°, что достижимо в настоящее время (см. упомянутый Р.К.Диксона "Широкополосные сигналы"), получаем выигрыш по вероятности Рлт предлагаемый способ в виде

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| РАДИОИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ИССЛЕДОВАНИЯ ОБЪЕКТОВ БЛИЖНЕГО И ДАЛЬНЕГО КОСМОСА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2624912C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2010 |
|
RU2425423C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВОЗМОЖНОСТИ ВОЗНИКНОВЕНИЯ ЦУНАМИ И ОПРЕДЕЛЕНИЕ ЕГО ЭПИЦЕНТРА | 2005 |
|
RU2300787C2 |
| СИСТЕМА ОРИЕНТАЦИИ АНТЕННЫ СТАНЦИИ СВЯЗИ | 2009 |
|
RU2408917C1 |
| РЕТРАНСЛЯТОР | 2023 |
|
RU2808202C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2019 |
|
RU2722518C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2117392C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2116699C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |

Изобретение относится к радиосвязи и может быть использовано для защиты от имитационных помех, создаваемых радиосредствами радиопротиводействия. Технический результат заключается в повышении достоверности приема информации при имитационных помехах. Способ включает передачу сигналов с информацией об адресе и координатах корреспондента, прием этих сигналов абонентом на разнесенные антенны, измерение направления корреспондента, измерение и запоминание собственных координат абонента, декодирование адреса и координат корреспондента и вычисление по координатам абонента и корреспондента направления корреспондента. Согласно изобретению вводится сравнение измеренного и вычисленного направлений корреспондента. В случае их совпадения производится временное выравнивание сигналов от разнесенных антенн в соответствии с вычисленным направлением, в противном случае - блокирование сигналов. 4 ил.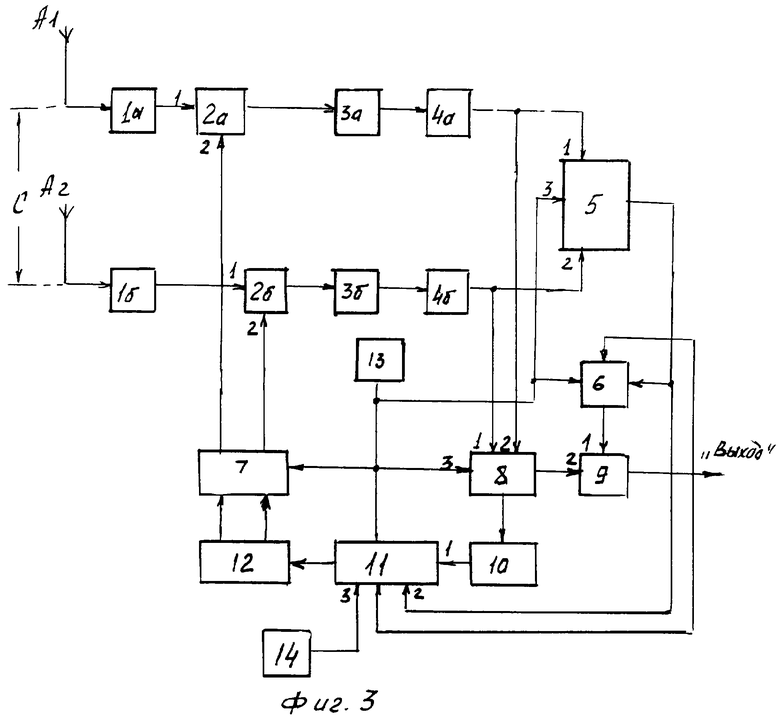
Способ защиты от имитационных помех в системах подвижной радиосвязи, включающий передачу сигналов с информацией об адресе и координатах корреспондента, прием этих сигналов абонентом на разнесенные антенны, измерение направления корреспондента, измерение и запоминание собственных координат абонента, декодирование адреса и координат корреспондента и вычисление по координатам абонента и корреспондента направления корреспондента, отличающийся тем, что, с целью повышения достоверности приема информации при имитационных помехах, вводится сравнение измеренного и вычисленного направлений корреспондента, и в случае их совпадения производится временное выравнивание сигналов от разнесенных антенн в соответствии с вычисленным направлением, в противном случае - блокирование сигналов.
| Источники информации, принятые во внимание при экспертизе: | |||
| Патент США №4077005 от 28.02.78, Н 04 К 1/00. |

