Изобретение относится к устройствам управления и ориентации антенн. Изобретение может быть использовано для ориентации антенн мобильных и стационарных станций связи за счет непрерывной выработки высокоточной навигационной информации о координатах, курсе, крене и тангаже станции связи.
Известна следящая наблюдательная система [1], содержащая последовательно соединенные блок наведения и стабилизации, пеленгатор, преобразователь из инструментальной в стабилизированную систему координат, коммутатор, корректирующее устройство, преобразователь из стабилизированной в инструментальную систему координат, гироскопический датчика угла, преобразователь из инструментальной в исполнительную систему координат, выходом соединенный с первым входом блока наведения и стабилизации, и имитатор гироскопического датчика угла, первым входом соединенный с выходом корректирующего устройства, а вторым - со вторым выходом блока наведения и стабилизации, выход имитатора гироскопического датчика угла соединен со вторым входом блока наведения и стабилизации. Гироскопический датчик угла расположен на той же платформе, что и приемное устройство пеленгатора.
Данная система решает задачу слежения за подвижными объектами, в том числе с качающегося основания, и может быть использована для ориентации и стабилизации объектов.
Недостатками следящей наблюдательной системы является то, что не обеспечивается высокая точность стабилизации антенны по углу места и по азимуту за счет накапливания с течением времени ошибки в гироскопических устройствах [2, 3], что, в свою очередь, снижает надежность.
Наиболее близка к заявляемой система стабилизации антенны мобильной радиолокационной системы обнаружения [4], содержащая задатчик угла стабилизации, датчик угла наклона продольной оси основания антенны и датчик угла наклона поперечной оси основания, подключенные соответственно к первому, второму и третьему входам функционального преобразователя координат (далее в материалах заявки названного блоком управления антенны), следящий привод (далее в материалах заявки названный поворотное устройство антенны), выход которого является выходом системы, а также датчик азимутального положения, в котором имеется дифференцирующее устройство, задатчик времени запаздывания, множительное устройство, сумматор, задатчик коэффициента передачи и масштабный усилитель, выход сумматора подключен к четвертому входу функционального преобразователя координат, а выход датчика азимутального положения подключен к входу дифференцирующего устройства и первому входу сумматора, второй вход сумматора подключен к выходу множительного устройства, первый вход множительного устройства соединен с выходом дифференцирующего устройства, а второй вход соединен с выходом задатчика времени запаздывания, первый вход масштабного усилителя подключен к выходу функционального преобразования координат, второй вход масштабного усилителя подключен к выходу задатчика коэффициента передачи, а выход масштабного усилителя подключен к входу следящего привода.
Данная система решает задачу регулирования направления и может быть использована для стабилизации положения луча диаграммы направленности объектов.
Недостатком данной системы является то, что система не обеспечивает высокую точность стабилизации антенны по углу места и по азимуту, невозможна стабилизация и ориентация антенны при работе в движении из-за отсутствия выработки координат станции.
В основу изобретения положена задача создания системы ориентации антенны станции связи, обеспечивающей непрерывное высокоточное определение координат, курса, крена и тангажа станции связи и наведение антенны на корреспондента в движении и на стоянке.
Поставленная задача решается тем, что в систему ориентации антенны станции связи, содержащую последовательно соединенные блок управления антенной, поворотное устройство антенны, антенну, согласно изобретению дополнительно введены блок управления станции, подключенный к блоку управления антенной, n навигационных спутников, первая, вторая и третья навигационные антенны, каждая из которых подключена к входу первого, второго и третьего навигационных приемников соответственно, выходы которых соединены с первым, вторым и третьим входами блока управления антенной.
В отличие от известной в предлагаемой системе ориентации антенны станции связи дополнительно введены блок управления станции, подключенный к блоку управления антенной, n навигационных спутников, первая, вторая и третья навигационные антенны, каждая из которых подключена к входу первого, второго и третьего навигационных приемников соответственно, выходы которых соединены с первым, вторым и третьим входами блока управления антенной.
Дополнительное введение блока управления станции, подключенного к блоку управления антенной, n навигационных спутников, первой, второй и третьей навигационных антенн, каждая из которых подключена к входу первого, второго и третьего навигационных приемников соответственно, выходы которых соединены с первым, вторым и третьим входами блока управления антенной, позволяет создать систему ориентации антенны станции связи, обеспечивающей непрерывное высокоточное определение координат, курса, крена и тангажа станции связи и наведение антенны на корреспондента в движении и на стоянке.
Изобретение поясняется чертежами, на которых:
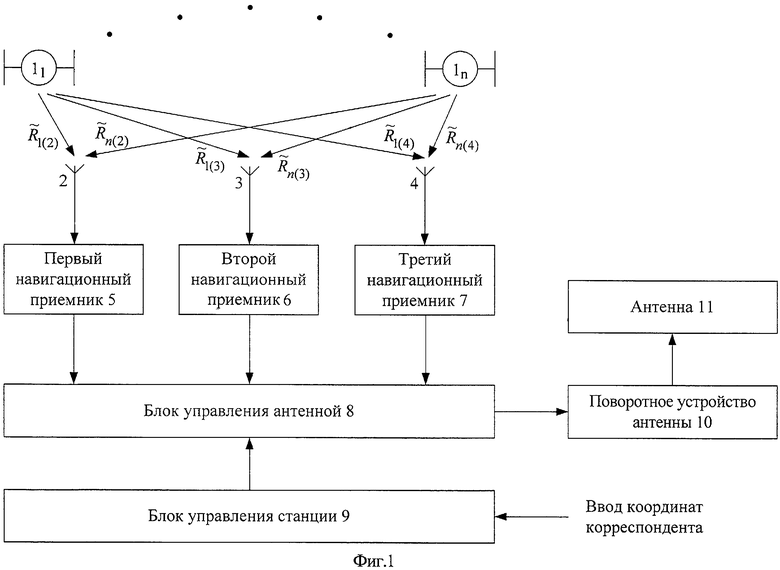
на фиг.1 изображена структурная схема системы ориентации антенны станции связи;
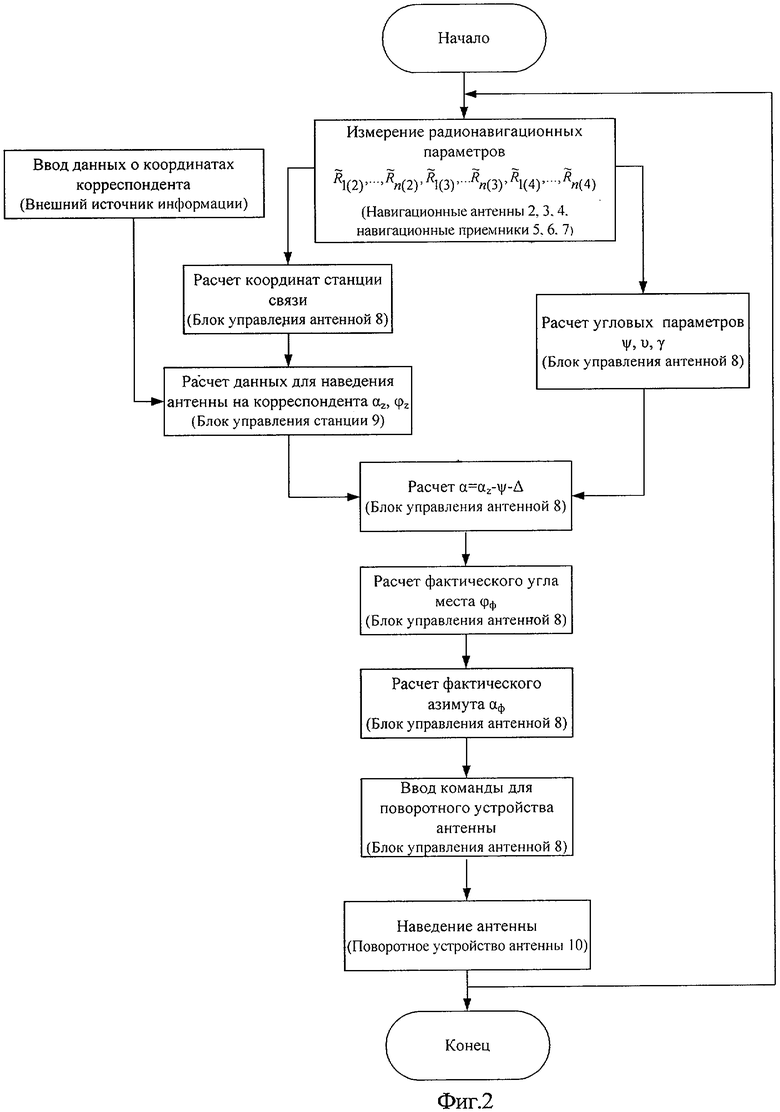
на фиг.2 - алгоритм работы системы ориентации антенны станции связи;
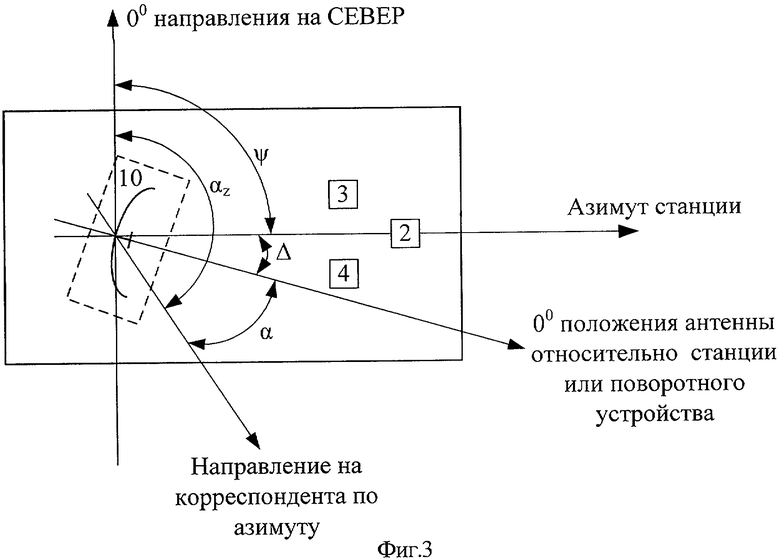
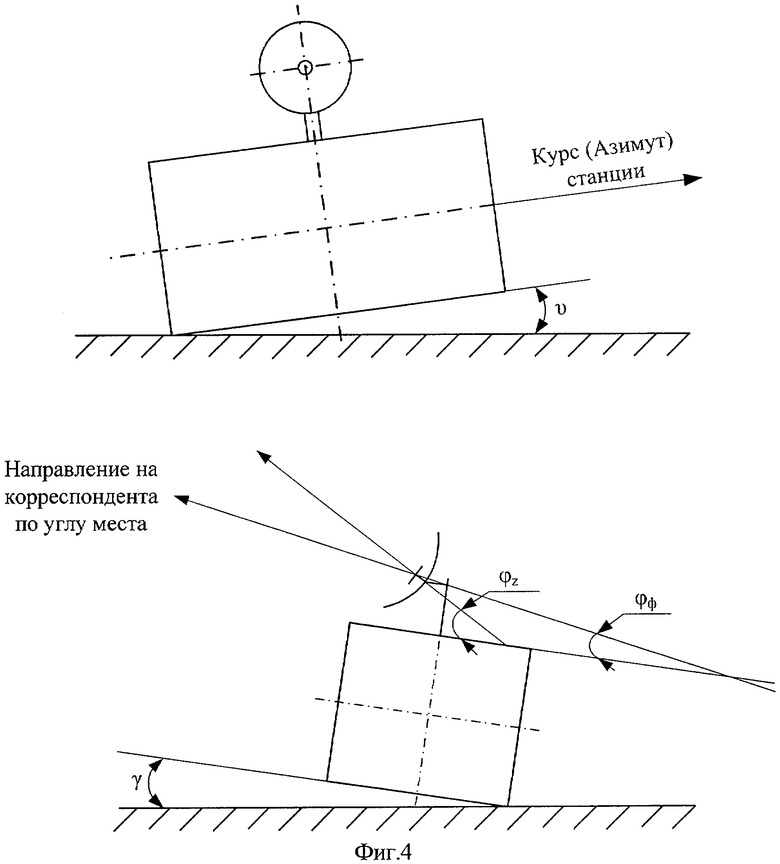
на фиг.3 и 4 - чертежи, поясняющие принцип ориентации и наведения антенны станции связи на корреспондента;
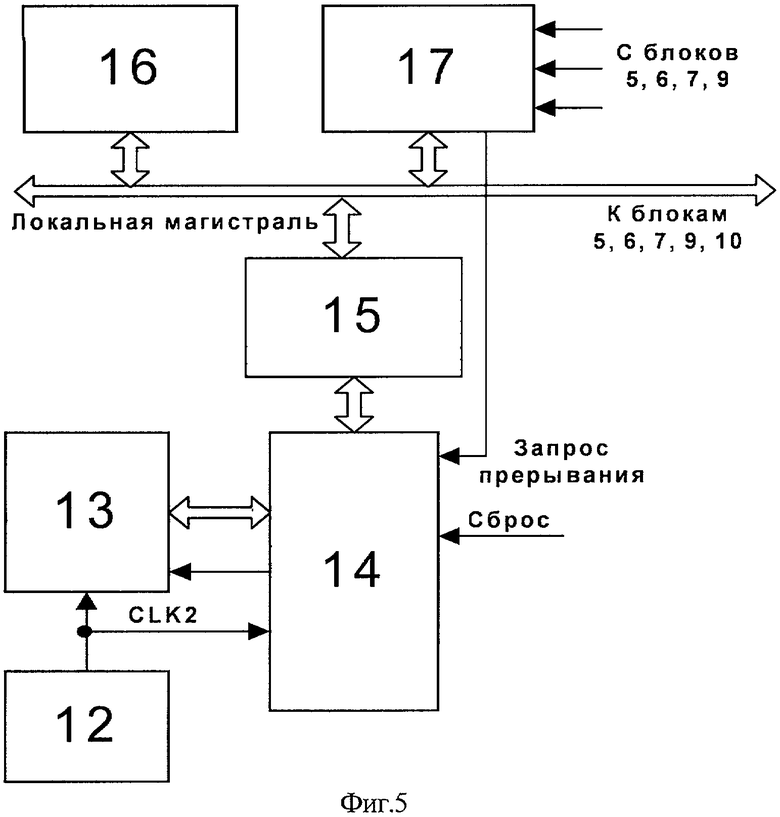
на фиг.5 - структурная схема варианта блока управления антенной.
Система ориентации антенны станции связи (фиг.1) содержит n навигационных спутников l1…ln, первую 2, вторую 3 и третью 4 навигационные антенны, подключенные соответственно ко входам первого 5, второго 6 и третьего 7 навигационных приемников, выходы которых соединены с первым, вторым, третьим входами блока управления антенной 8, выход которого соединен с входом блока управления станции 9, второй выход блока управления антенной 8 соединен с входом поворотного устройства антенны 10, которое жестко соединено с антенной 11.
Работает система следующим образом.
Сигналы от навигационных спутников l1…ln спутниковой радионавигационной системы, например ГЛОНАСС, принимаются первой 2, второй 3 и третьей 4 навигационными антеннами, в навигационных приемниках 5, 6, 7 определяются радионавигационные параметры  ,
,  ,
,  . С выхода навигационных приемников 5, 6, 7 измеренные значения радионавигационных параметров
. С выхода навигационных приемников 5, 6, 7 измеренные значения радионавигационных параметров  ,
,  ,
,  поступают соответственно на блок управления антенной 8, где производится расчет координат станции и ее угловых параметров (курс, тангаж, крен) [5, с.206-208].
поступают соответственно на блок управления антенной 8, где производится расчет координат станции и ее угловых параметров (курс, тангаж, крен) [5, с.206-208].
В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат станции может быть использован алгоритм, приведенный, например, в [5].
Навигационные антенны 2, 3, 4 размещены таким образом на объекте, чтобы была угловая привязка пространственного положения навигационных антенн 2, 3, 4 к пространственному расположению оси диаграммы направленности антенны связи. В блок управления станции 9 от внешнего источника информации (фиг.2), например клавиатуры, записывается информация о координатах корреспондента. Информация о координатах корреспондента, хранящаяся в блоке управления станции 9, и информация о координатах станции, поступающая из блока управления антенной 8 в блок управления станции 9, используются для расчета задаваемого азимута αz и задаваемого угла места φz для наведения антенны станции связи на корреспондента. Полученные значения αzn и φzn (n=1…∞ - номер измерения навигационных параметров) блок управления станции 9 передает в блок управления антенной 8, где значения αzn и φzn записываются в него и используются для дальнейших вычислений. Измерение радионавигационных параметров навигационными антеннами 2, 3, 4 и навигационными приемниками 5, 6, 7, а также расчет координат станции блоком управления антенной 8 с заданным циклом повторяется, соответственно, циклически производится расчет задаваемого азимута αzn и задаваемого угла места φzn. Расчет угловых параметров в блоке управления антенной 8, курса (ψ), тангажа (υ), крена (γ) с заданным циклом повторяется, и для дальнейших вычислений используются новые значения ψn, υn, γn. Измерение радионавигационных параметров навигационными антеннами 2, 3, 4 и навигационными приемниками 5, 6, 7, а также расчет координат станции и ее угловых параметров блоком управления антенной 8 циклически повторяется, соответственно, циклически производится анализ блоком управления антенной 8 по изменению угловых параметров станции (курса, тангажа, крена). После расчета новых значений и записи в блок управления антенной 8 новых значений (азимута, угла места, курса, тангажа или крена) производится последовательное вычисление в соответствии с фиг.2. Определяется азимут антенны (α) по формуле
α=αz-ψ-Δ,
где α - азимут антенны относительно станции (фиг.3);
Δ - угол отклонения, разница между азимутом станции (курсом) и нулевым положением антенны относительно станции или поворотного устройства (фиг.3).
Далее в блоке управления антенной 8 происходит вычисление фактического угла места (φф) диаграммы направленности антенны относительно станции связи с учетом крена и тангажа (фиг.3) по формуле [6], преобразованной к виду:
φф=arcsin[cosα·cosφz·sin(-υ)·cosγ-sinα·cosφz·sinγ+sinφz·cos(-υ)·cosγ].
Далее в блоке управления антенной 8 рассчитывается фактический азимут αф диаграммы направленности антенны относительно станции связи с учетом крена и тангажа по формуле
 . Рассчитанные значения фактического угла места φф и фактического азимута αф поступают с выхода блока управления антенной 8 в поворотное устройство антенны 10, где происходит наведение диаграммы направленности антенны 11 по полученным значениям φф и αф.
. Рассчитанные значения фактического угла места φф и фактического азимута αф поступают с выхода блока управления антенной 8 в поворотное устройство антенны 10, где происходит наведение диаграммы направленности антенны 11 по полученным значениям φф и αф.
Длительность цикла работы системы ориентации антенны станции связи выбирается таким образом, чтобы успевали выполняться прием, измерения, обработка радионавигационной информации, вычисление значений фактического угла места и фактического азимута, а также ориентация антенны по вычисленным значениям фактического угла места и фактического азимута.
Блок управления антенной 8 в связи с большим объемом вычислений необходимо реализовать, например, на основе микропроцессора Intel 80386 по типовой структуре, описанной в [7, стр.13].
На фиг.5 приведена структурная схема варианта блока управления антенной 8, содержащего тактовый генератор 12, арифметический сопроцессор 13, микропроцессор 14, соединенный с локальной магистралью при помощи логики управления магистралью 15, локальную память 16, служащую для хранения программ и промежуточных данных, и контроллер прерываний 17, осуществляющий взаимодействие с блоками 5, 6, 7, 9.
Локальная магистраль состоит из шины данных, по которой передается информация с подключенных внешних устройств: первого навигационного приемника 5, второго навигационного приемника 6, третьего навигационного приемника 7, блока управления станции 9, а также организуется выдача информации в поворотное устройство антенны 10, шины адреса, служащей для адресации памяти и выбора внешних устройств и шины управляющих сигналов, таких как «Чтение памяти», «Запись в память», необходимых при работе программ. Контроллер прерываний 17 обрабатывает сигналы прерываний от блоков 5, 6, 7, 9 и вырабатывает сигнал «Запрос прерывания», поступающий на вход маскируемого прерывания микропроцессора 14. Локальная память 16 содержит постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ). В ПЗУ содержится программа обработки, реализующая алгоритм, приведенный на фиг.2, а также константы и другая необходимая информация. ОЗУ содержит текущие данные, приходящие с блоков 5, 6, 7, 9, и информацию, необходимую для передачи в поворотное устройство 10. Арифметический сопроцессор 13 соединен локальной магистралью с микропроцессором 14 и предназначен для выполнения математических вычислений. Тактовый генератор 12 формирует сигналы тактовой частоты CLK2, поступающие на входы тактовой частоты микропроцессора 14 и сопроцессора 13.
При реализации блока управления станции 9 на базе микропроцессора Intel 80386 должны быть использованы микросхемы следующих типов: тактовый генератор 12 - i82384; микропроцессор 14 - i80386; арифметический сопроцессор 13 - i80387; контроллер прерываний 17 - i8259 или их аналоги, выпускаемые отечественной промышленностью.
Структурная схема варианта блока управления станции 9 отличается от схемы блока управления антенной 8 тем, что контролер прерываний 17 обрабатывает сигналы прерываний от блока управления антенной 8 и от внешнего источника информации, например клавиатуры, подключаемого к системе для передачи информации о координатах корреспондента. К локальной магистрали подключаются внешние устройства: блок управления антенной 8, внешний источник информации. Назначение остальных блоков, входящих в блок управления станции 9, не отличается от блоков, входящих в блок управления антенной 8.
Навигационные приемники 5, 6, 7 могут быть выполнены в соответствии с рис. 1.14 [8], рис.38 [9].
Для практического выполнения заявляемой системы могут быть использованы серийно выпускаемые механические элементы, элементы автоматики и вычислительной техники. Поворотное устройство антенны 10 и антенна 11 широко описаны в литературе, например [10, 11].
Использование изобретения позволит:
- обеспечивать оперативную стабилизацию антенны при работе в движении, в том числе высокоскоростных и маневрирующих станций связи, а также на стоянке;
- уменьшить время на наведение антенны на корреспондента;
- исключить участие обслуживающего персонала станции в ориентации
и стабилизации станции связи.
Рассмотрим числовой пример применения предлагаемой системы при ориентации антенны станции связи на корреспондента.
Измерение разностей фаз принятых сигналов в точках 2, 3, 4 позволяет определить азимут (курс), тангаж и крен станции связи и непрерывно выдавать их совместно с координатами станции связи в блок управления антенной 8. При этом аппаратурная погрешность измерений фазовых сдвигов на несущих частотах системы ГЛОНАСС в диапазоне частот 1600 МГц составит Δφ≈0.01фц (3.6°). Исходя из этого, величина погрешности определения азимута (курса) и углов тангажа и крена может быть определена по приближенной формуле:
 ,
,
где λ - длина волны принятых сигналов для несущей, равной 1600 МГц, составляет 0.1875 м; В - расстояние между фазовыми центрами антенн 2, 3 и 4, расположенных, как показано на фиг.3.
При расстоянии между фазовым центрами антенн 2, 3 и 4 В=2 м погрешность измерения азимута (курса) и углов тангажа и крена станции связи составляет не более 4 угловых минут и не изменяется с течением времени.
Это обеспечивает высокую точность наведения антенны станции связи на корреспондента.
Литература
1. Патент РФ №2211473, кл. G05D 3/12, опубл. 27.08.2003 г.
2. Бабаева Н. Гироскопы. / Н.Бабаева. - Л.: Машиностроение, 1973.
3. Шереметьев А. Волоконный оптический гироскоп. / А.Шереметьев. - М.: Радио и связь, 1987.
4. Патент РФ №2058578, кл. G05D 1/00, опубл. 20.04.1996 г.
5. Сетевые спутниковые радионавигационные системы. Под ред. В.С.Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993.
6. SU, авторское свидетельство, 1805451, кл. G05D 1/00, опубл. 30.03.1993 г.
7. Брамм П., Брам Д. Микропроцессор 80386 и его программирование: Пер. с англ. - М.: Мир, 1990.
8. Цифровые радиоприемные системы. Под ред. Жодзижского. М.: Радио и связь, 1990.
9. Бортовые устройства спутниковой навигации. Под ред. В.С.Шебшаевича. М.: Транспорт, 1988.
10. Покрас А.М. и др. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985.
11. Механизмы вращения антенн. Перевод с анг. Под ред. Г.С.Ханевского. М.: Советское радио, 1951.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ОРУДИЯ | 2011 |
|
RU2466343C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| ИЗМЕРИТЕЛЬ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2381964C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
Изобретение относится к области приборостроения и может найти применение для ориентации антенн мобильных и стационарных станций связи. Технический результат - повышение точности. Для достижения данного результата система содержит последовательно соединенные блок управления антенной, поворотное устройство антенны, антенну, блок управления станции, подключенный к блоку управления антенной, n навигационных спутников, первая, вторая и третья навигационные антенны, каждая из которых подключена ко входу первого, второго и третьего навигационных приемников, выходы которых соединены с первым, вторым и третьим входами блока управления антенной. 5 ил.
Система ориентации антенны станции связи, содержащая последовательно соединенные блок управления антенной, поворотное устройство антенны, антенну, отличающаяся тем, что дополнительно введены блок управления станции, подключенный к блоку управления антенной, n навигационных спутников, первая, вторая и третья навигационные антенны, каждая из которых подключена к входу первого, второго, третьего навигационных приемников соответственно, выходы которых соединены с первым, вторым и третьим входами блока управления антенной.
| RU 2058578 С1, 20.04.1996 | |||
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| US 5570097 А, 29.10.1996 | |||
| JP 8250919 А, 27.09.1996. | |||

