Изобретение относится к области технической гидроакустики, а более конкретно к способам гидроакустического шумо- и эхопеленгования.
В гидроакустике пеленгованием называют определение направления прихода прямых волн, излученных какими-либо источниками или волн, отраженных подводными препятствиями. Источниками прямых волн может являться подводное шумоизлучение кораблей и судов. Источниками эхосигналов, то есть отраженных акустических волн, являются подводные лодки и другие подводные объекты. Совершенствование способов гидроакустического пеленгования представляет актуальную задачу.
Известен максимальный способ пеленгования (А.М.Тюрин, А.П.Сташкевич, Э.С.Таранов. Основы гидроакустики. - Л.: Судостроение, 1966, с.178), при котором направление на источник звука определяется по максимуму напряжения, развиваемого на выходе приемной гидроакустической системы. Изменение наблюдаемого сигнала при малых изменениях угла можно представить в виде пеленгационной чувствительности для направления α (В.А.Зарайский, А.М.Тюрин. Теория гидролокации. - Л: ВМОЛУА, 1975, с.391)

где А - коэффициент пропорциональности, обычно значение выходного напряжения;
R(α) - характеристика направленности приемной системы.
В максимуме R(α) частная производная

и это существенно ограничивает точность определения направления по максимальному методу.
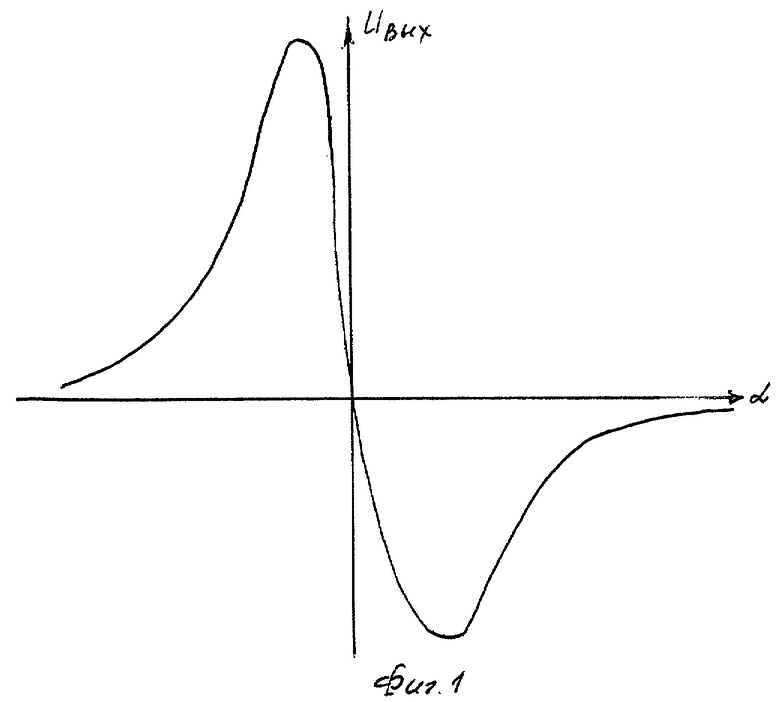
Существенно более точными и наиболее применяемыми являются минимальные принципы в пеленговании. Минимальное пеленгование имеет преимущество нулевого способа, оно не зависит от амплитуды падающих волн и их флюктуаций; кроме того, точность пеленгования при этом способе много больше, чем точность при максимальном способе, при котором касательная характеристики направленности пеленгатора перпендикулярна направлению пеленга, что приводит при малых отклонениях пеленга практически к очень малому различию амплитуд (Ф.Ланге. Корреляционная электроника. - Л.: Судпромгиз, 1963, с.374). Минимальные принципы используются в фазовом, фазово-амплитудном, равносигнальном, корреляционном (Гванелла, 1956 г.) способах, при которых пеленгационная характеристика (см. фиг.1) имеет нуль при α=0.
В качестве способа-прототипа выбран фазовый способ пеленгования (А.М.Тюрин, А.П.Сташкевич, Э.С.Таранов. Основы гидроакустики. - Л.: Судостроение, 1966, с.184), при котором для фиксации отклонения пеленга используется разность фаз звуковых колебаний, приходящих к приемникам линейной базы (фиг.2).
При этом способе формируются разностная и суммарная характеристики направленности


где R1/2 (α) - характеристика направленности половины приемной антенны,
где K - волновое число,
λ - длина звуковой волны в среде.
Далее вводят в канал суммы сдвиг фаз на π/2 и подают сигналы на отклоняющие пластины электронно-лучевой трубки: вертикальной и горизонтальной. По углу на экране электронно-лучевой трубки
судят об угле α. Другие способы пеленгования: фазово-амплитудный, равносигнальный и корреляционный, в своей основе имеют также разностную характеристику направленности в пространстве. Они отличаются от фазового способа вторичной обработкой сигнала. В способе-прототипе характеристики направленности (разностная и суммарная) обычно формируются в частотной области путем быстрого преобразования Фурье (БПФ) по каждому приемному каналу (от каждого приемника дискретной решетки) и суммирования (подробнее см. книгу под ред. Э.Оппенгаймера. Применение цифровой обработки сигналов. - М.: Мир, 1980, с.444).
В присутствии шумов-помех случайная погрешность, определяющая точность пеленгования, численно равна угловому отклонению от направления истинного пеленга цели, вызывающему приращение выходного напряжения, равное среднеквадратическому значению напряжения шумов σш (см., например, А.Г.Николаев, С.В.Перцев. Радиотеплолокация (пассивная радиолокация). - М.: Сов. радио, 1964, с.139)

Для способа-прототипа в предположении, что А=1
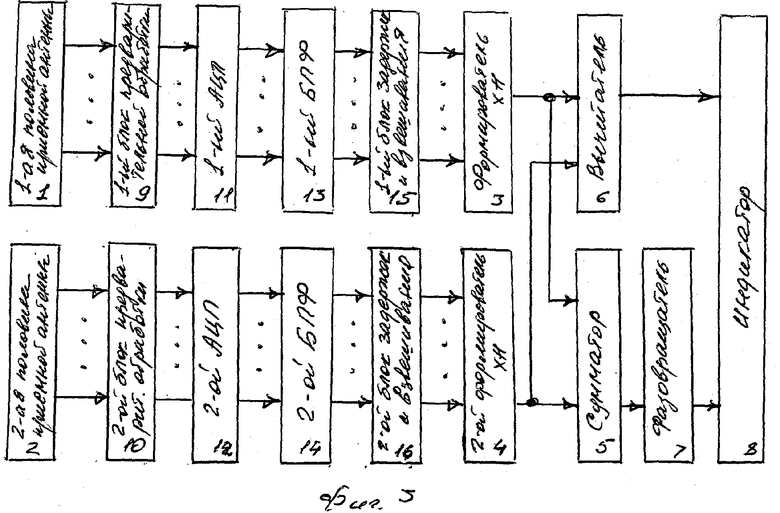
Устройство, реализующее способ-прототип (фиг.3), содержит параллельно-последовательно соединенные приемную антенну, разделенную на две половины, первый и второй блоки предварительной обработки, первый и второй блоки аналого-цифрового преобразования (АЦП), первый и второй блоки быстрого преобразования Фурье (БПФ), первый и второй блоки задержек и взвешивания, первый и второй формирователи характеристик направленности (ХН), вычитатель, сумматор, фазовращатель и индикатор. Блок-схема пеленгатора-прототипа приведена в книге В.Н.Тюлина. Теория акустического пеленгования. - Л.: ВМАКВ им. А.Н.Крылова, 1954, с.20 (схемы аналогичных пеленгаторов, используемые в настоящее время, приведены только в технической документации, недоступной для экспертов).
Недостатками способа-прототипа и реализующего его устройства являются малая точность пеленгования, определяемая формулой (8), а также большой объем вычислительных работ при формировании направленности в частотной области. Кроме того, фазовый способ чрезвычайно чувствителен к аппаратурным ошибкам двухканальной схемы пеленгаторов (см., например, "Исследование точности и помехоустойчивости фазовых радиопеленгаторов" под ред. В.Б.Пестрякова. - Л.: Судпромгиз, 1959, с.6-20, 74-92).
Целью изобретения является повышение точности пеленгования и сокращение объема вычислительных работ при формировании направленности в частотной области.
Предлагаемый способ, как и способ-прототип, содержит прием акустических колебаний в воде в N точках приема, расположенных на расстояниях d друг от друга на прямой длиной α=d(N-1), преобразование акустических колебаний в электрические колебания, суммирование, фильтрацию и индикацию.
Поставленная цель реализуется за счет введения операций: осуществляют преобразование Хартли электрических колебаний по каждому приемному каналу, суммирование производят по всем каналам по каждой из частот хартлиевской области отдельно в области отрицательных частот и отдельно в области положительных частот, формируют отклонение пеленга на пеленгуемую цель, используя просуммированные значения в частотной области, а фильтрацию осуществляют путем свертки преобразований Хартли.
Устройство для реализации предлагаемого способа содержит последовательно-параллельно соединенные приемную антенну из N электроакустических преобразователей, блок предварительной обработки, аналого-цифровой преобразователь, процессор быстрого преобразования Хартли (БПХ), блок свертки преобразований Хартли, сумматор в области отрицательных частот и автосопроводитель цели (АСЦ), первый выход которого соединен с первым входом индикатора, второй выход которого соединен с блоком свертки преобразований Хартли, сумматор в области положительных частот, выход которого соединен со вторым входом индикатора, индикатор, также содержит блок управления, синхровыходы которого соединены с синхровходами блоков АЦП, БПХ, блока свертки, сумматоров и индикатора.
Новыми операциями в предлагаемом способе являются воздействие на материальный объект - электрические колебания на входах N приемных каналов - путем преобразования Хартли временных электрических колебаний в частотную область, суммирования по всем каналам по каждой из частот хартлиевской области отдельно в области отрицательных частот и отдельно в области положительных частот. Принципиально то, что выполняя хартлиевские операции только с вещественными числами удается сформировать, используя область отрицательных частот, пространственную избирательность с нулем на всех частотах при α=0 (или при α=αо при наличии компенсации), то есть сформировать пеленгационную характеристику.
Новым в устройстве являются введенные последовательно-параллельно соединенные процессор быстрого преобразования Хартли (БПХ), блок свертки преобразований Хартли, блоки суммирования по всем каналам по отрицательным и положительным частотам.
Заявителю и авторам не известны из технической литературы и патентной документации подобные технические решения, отличающие способ и устройство от прототипа. Кроме того, в заявленном объекте проявляются новые полезные свойства - повышение точности пеленгования без увеличения размера α приемной антенны.
На фиг.1 приведено пояснение к способу-аналогу - изображена пеленгационная характеристика.
На фиг.2 приведено пояснение к операциям способа-прототипа. Здесь: 1 - первая половина гидроакустической антенны, 2 - вторая половина гидроакустической антенны, обеспечивающие прием сигнала и преобразование акустических колебаний в электрические колебания каждая в N/2 точках, расположенных на расстояниях d друг от друга, 3 - формирователь характеристик направленности первой половины антенны 1, 4 - формирователь характеристик направленности второй половины антенны 2, 5 - сумматор, 6 - вычитатель, 7 - фазовращатель на π/2, 8 - индикатор.
На фиг.3 приведена блок-схема устройства, реализующего способ-прототип. Здесь: 9, 10 - первый и второй блоки предварительной обработки соответственно, 11 и 12 - первый и второй аналого-цифровые преобразователи (АЦП) соответственно, 13 и 14 - первый и второй блоки быстрого преобразования Фурье (БПФ) соответственно, 15 и 16 - первый и второй блок задержек и взвешивания соответственно.
На фиг.4 приведена блок-схема предлагаемого устройства, реализующего заявляемый способ. Здесь: 17 - приемная антенна из электроакустических преобразователей, 18 - блок предварительной обработки, 19 - блок аналого-цифровой обработки (АЦП), 20 - процессор преобразования Хартли, 21 - блок свертки преобразований Хартли, 22 - сумматор в области положительных частот, 23 - сумматор в области отрицательных частот, 24 - блок управления.
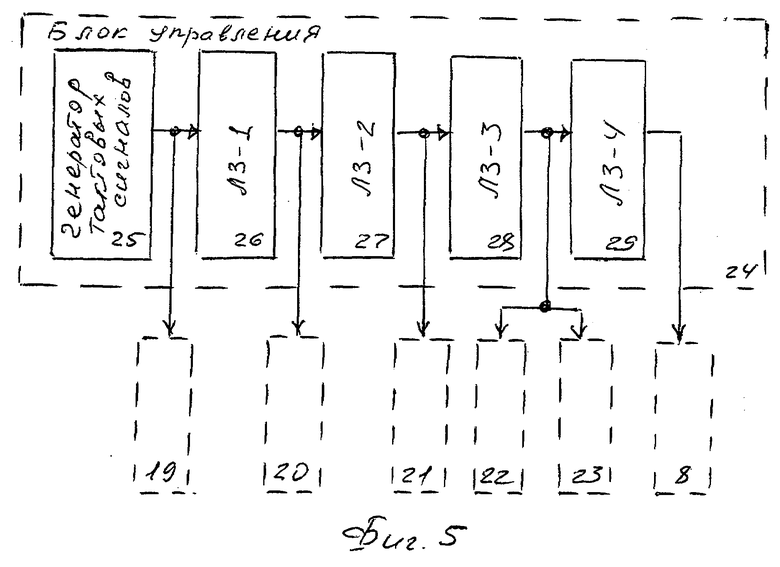
На фиг.5 приведена блок-схема блока управления предлагаемого устройства. Здесь: 25 - генератор тактовых сигналов, 26, 27, 28, 29 - линии задержек (ЛЗ).
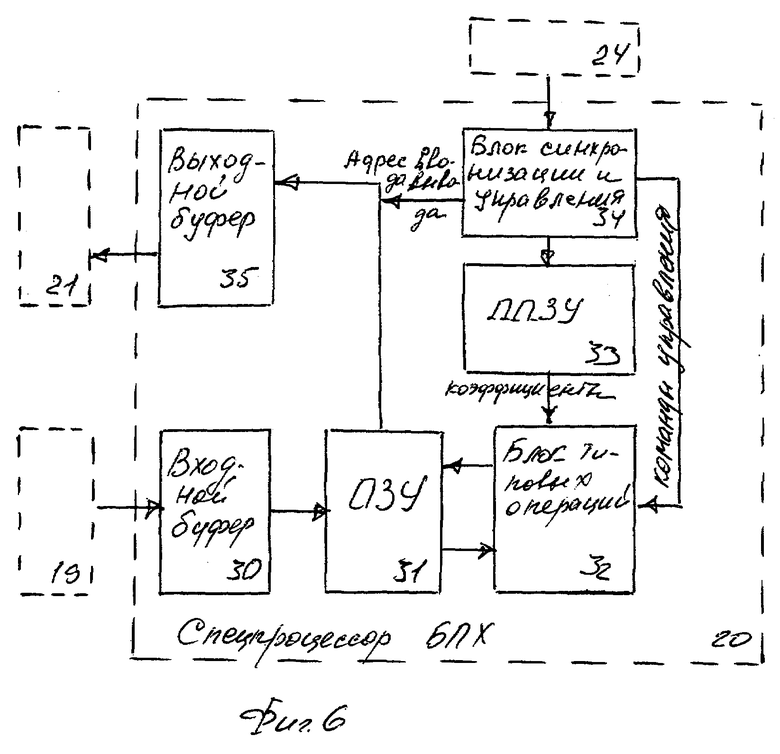
На фиг.6 приведена блок-схема спецпроцессора быстрого преобразования Хартли (БПХ) 20. Здесь: 20 - входной буфер, 31 - оперативно-запоминающее устройство (ОЗУ), 32 - блок типовых операций БПХ, 33 - программно-программируемое устройство (ППЗУ), 34 - блок синхронизации и управления, 35 - выходной буфер.
Пример. Осуществлялось пеленгование подводной цели с помощью приемной гидроакустической антенны из NM приемных преобразователей. Причем М приемных преобразователей объединялись электрически; образовался прием сигналов на N вертикальных столбов приема сигналов в горизонтальной плоскости - плоскости приема акустических сигналов. Акустические колебания в этих N вертикальных столбах преобразовывались в электрические колебания с помощью цилиндрических электроакустических преобразователей. После этого электрические колебания преобразовывались в частотную область путем преобразования Хартли. Далее было выполнено суммирование отдельно по отрицательным и отдельно по положительным частотам для всех N приемных каналов. Эти суммарные частотные зависимости были подвергнуты фильтрации, например, эккартовского типа и поданы на отклоняющие пластины электронно-лучевой трубки. По отклонению от вертикальной прямой судили о направлении на пеленгуемую цель. Так как конкретные данные отнесены к охраняемым параметрам, числовые значения в настоящем примере не приводятся.
Предлагаемое устройство - гидроакустический пеленгатор - содержит последовательно-параллельно соединенные приемную антенну из электроакустических преобразователей 17, блок предварительной обработки 18, АЦП 19, процессор быстрого преобразования Хартли (БПХ) 20, блок свертки преобразований Хартли 21, сумматор в области положительных частот 22, сумматор в области отрицательных частот и автосопроводитель цели 23, индикатор 8, также содержит блок управления 24, синхровыходы которого соединены с синхровходами блока АЦП 19, процессора БПХ20, блока свертки 21, первого и второго сумматоров 22 и 23 и индикатора 8.
Работа устройства осуществляется следующим образом. Акустические колебания принимаются приемной антенной 17 и с помощью электроакустических приемников преобразовываются в электрические колебания. В блоке 18 осуществляется предварительное усиление и фильтрация частот ниже и выше рабочего диапазона, то есть ограничение частотного диапазона от нижней рабочей частоты fн до верхней рабочей частоты fв.
В АЦП 19 по каждому приемному каналу осуществляется квантование и дискретизация. Причем дискретная переменная времени принимает целочисленные значения от 0 до n-1.
В блоке 20 осуществляется дискретное преобразование Хартли вида

где дискретная переменная ν интерпретируется как частота.
Частотный интервал между соседними элементами последовательности H(ν) равен n-1 [Гц]. По мере увеличения ν возрастает соответственно частота, но только до значения  При дальнейшем росте величины ν соответствующая ей частота становится равной
При дальнейшем росте величины ν соответствующая ей частота становится равной  и обращается в нуль при ν=n. Программа быстрого преобразования Хартли (БПХ) FHTBAS приведена, например, в книге Р.Брейсуэлл. Преобразование Хартли. - М.: Мир, 1990 г., с.132. Построение блока 20 приведено на фиг.6.
и обращается в нуль при ν=n. Программа быстрого преобразования Хартли (БПХ) FHTBAS приведена, например, в книге Р.Брейсуэлл. Преобразование Хартли. - М.: Мир, 1990 г., с.132. Построение блока 20 приведено на фиг.6.
В блоке 21 осуществляется цифровая фильтрация посредством свертки преобразований Хартли вида
Выбирая H2(ν) для обеспечения требуемой фильтрации, находят необходимое преобразование. Большей частью подбирают H2(ν) четной. В этом случае

что существенно упрощает вычисления. В ряде случаев блок 21 строят и по алгоритму

где ДПХ - дискретное преобразование Хартли.
Сумматор в области отрицательных частот 22 формирует

где R+(α) - характеристика направленности аддитивной антенны из N элементов, а сумматор в области положительных частот 23 формирует

где
α - текущий угол,
d - расстояние между точками приема,
c - скорость звука в среде.
В сумматорах 22 и 23 также осуществляют суммирование по частоте (нуль в пеленгационной характеристике сохраняется на всех частотах ν∈[o, n]), то есть

и аналогично

Напряжения  и Н
и Н подаются, как и в устройстве-прототипе, на отклоняющие пластины электронно-лучевой трубки индикатора 8.
подаются, как и в устройстве-прототипе, на отклоняющие пластины электронно-лучевой трубки индикатора 8.
Блок управления 24 обеспечивает синхронизацию работы пеленгатора.
Таким образом, устройство-пеленгатор полностью решает поставленную задачу.
Следует сделать специальную оговорку по терминологии. Преобразование Хартли для непрерывного времени записывается в виде


Ввиду бесконечного существования времени t по теореме о зеркальном изображении для функции V(-t) соответствует преобразование Хартли H(-f), то есть по отрицательным частотам. Такая же ситуация наблюдается при преобразовании Фурье. Соответственно этому сдвиг, то есть преобразование вида

существует как по положительным, так и по отрицательным частотам. Аналогично энергетический спектр G(t) через преобразование Хартли записывается в виде

то есть также через положительные и отрицательные частоты.
При конечной выборке времени τ нумерация частот идет по ν от 0 до n/2 и по n-ν от n/2 до 0, то есть по ν и по n-ν. В такой записи, например, энергетический спектр

Учитывая физический смысл частот, ниже сохранены термины: "в области положительных частот" для ν∈[0, n/2] и "в области отрицательных частот" для ν∈[n-ν, 0].
Практическое исполнение блоков пеленгатора известно из практики гидроакустики.
Приемная антенна 17 обычно строится из цилиндрических электроакустических преобразователей, описанных, например, в книге Г.М.Свердлин. Прикладная акустика. - Л.: Судостроение, 1990, с.272.
Блок предварительной обработки 28 содержит предусилители и фильтры, ограничивающие рабочий диапазон частот. Смотрите, например, Ю.С.Кобяков, Н.Н.Кудрявцев, В.И.Тимошенко. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986, с.200-206.
Аналого-цифровые преобразователи построены по обычному принципу (смотрите, например, А.А.Брагин и др. Нормирование динамических характеристик быстродействующих АЦП. Измерительная техника, 1981, №6, с 16-18; А.А.Брагин, А.Л.Сименюк. Основы метрологического обеспечения аналого-цифровых преобразователей электрических сигналов. М: Издательство стандартов, 1989).
Процессор быстрого преобразования Хартли (БПХ) строятся на принципах, описанных, например, в книге под ред. С.Гука, Х.Уайтхауса, Т.Кайлата. Сверхбольшие интегральные схемы и современная обработка сигналов. М.: Радио и связь, 1989, с.131-171. Блок-схема спецпроцессора БПХ приведена на рис.6. Входной буфер 30 используется для приема входных данных и записи их в ОЗУ 31 с последующей передачей в блок типовых операций 32. В этот же блок из ППЗУ 33 передаются коэффициенты преобразования Хартли. Работу устройств процессора регулирует блок синхронизации и управления 34, обеспечивающий синхронизацию всех операций и управление циркуляции данных в процессоре БПХ 20. Блок типовых операций 32 выполняет базовые операции БПХ (сложение и умножение). Результаты вычислений из блока типовых операций 32 через ОЗУ 31 передаются в выходной буфер 35 и далее в устройство.
Блоки свертки 21, сумматоры 22 и 23 строятся на микропроцессорной технике, описанной, например, в книге Б.А.Кабаков. Микропроцессоры и их применение в системах передачи и обработки сигналов. М.: Радио и связь, 1988. Их управление описано в этой же книге на с.43-52. В блоке свертки 21 выполняется перемножение по алгоритму (II), сумматоры 22 и 23 выполняют суммирование по алгоритму (28) и (32).
Блок управления 24 строится по традиционной схеме.
Таким образом, построение блоков устройства не требует дополнительного изобретательского творчества.
Приведем подтверждение достижения эффекта в соответствии с целью изобретения.
Пусть производится прием сигналов в N точках, расположенных эквидистантно на расстояниях d друг от друга на прямой длиной L=d(N-1). После преобразования акустических колебаний в электрические образовались в каждом i-м канале электрические напряжения U(t-iωβ), где
α - текущий угол в плоскости, в которой лежит прямая,
αо - угол компенсации.
Эти i напряжений преобразуем по Хартли (Р.Брейсуэлл. Быстрое преобразование Хартли. ТИИЭР, 1984, №8, с.19-28), то есть выполним преобразование вида

где

Обратным преобразованием является
В отличие от преобразования Фурье, отображающего вещественные функции в комплексную область и несимметричного по j (происходит изменение знака при переходе от прямого к обратному преобразованию) преобразование Хартли осуществляет прямое и обратное преобразование только в вещественной области и обладает указанной симметрией.
В соответствии с теоремой о сдвиге для преобразования Хартли (Р.Брейсуэлл. Преобразование Хартли. М.: Мир, 1990, с.30)

где i=1,2,...,N.
В соответствии с операциями предлагаемого способа для пеленгационной характеристики используется только отрицательная область частот, в которой производится суммирование, то есть находят

Первый член этой суммы равен нулю. Поэтому остается N-1 слагаемое. Выполнение суммирования можно осуществить, используя табличную (формулу 420.1 справочника Г.Б.Двайт. Таблицы интегралов и другие математические формулы. М.: Физматлит, 1983, с.61. При больших N можно принять, что

Видно, что

где
Характеристика направленности линейной эквидистантной решетки из N элементов (М.Д.Смарышев, Ю.Ю.Добровольский. Гидроакустические антенны. Справочник. Л.: Судостроение, 1984, с.152, формула 5.31).
Одновременно, используя только положительную область частот, можно найти

После суммирования найдем при больших N

Если сигнал  подключить к вертикальным отклоняющим пластинам электронно-лучевой трубки, то на экране трубки появится прямая светящаяся линия (это операции способа-прототипа).
подключить к вертикальным отклоняющим пластинам электронно-лучевой трубки, то на экране трубки появится прямая светящаяся линия (это операции способа-прототипа).
Перемещения электронного пятна вдоль осей Ox и Oy трубки будут, очевидно, пропорциональны  и
и  . Обозначая через x и y соответствующее перемещение пятна вдоль координатных осей, уравнение светящейся линии на экране трубки можно записать в виде
. Обозначая через x и y соответствующее перемещение пятна вдоль координатных осей, уравнение светящейся линии на экране трубки можно записать в виде
Следовательно, угол наклона светящейся линии к вертикальному диаметру электронно-лучевой трубки будет

или, учитывая, что 
Следуя работе В.Н.Тюлин. Теория акустического пеленгования. Л.: ВМАКВ им. А.Н.Крылова, 1954, с.23, рассмотрим чувствительность способа. При малых углах Δα имеем

Отсюда расчетная точность пеленгования равна

где Δθo - минимальный возможный для наблюдения угол отклонения прямой от вертикального положения.
Расчетная точность пеленгования для способа-прототипа из выражения (6) будет
и, следовательно, в 2 раза хуже: при одном и том же угле Δθo для способа-прототипа возможно различить реальный угол направления на цель, только в 2 раза больший.
В присутствии шумов-помех работе пеленгатора со среднеквадратическим напряжением σш, принимая коэффициент А, равным единице, из формулы (7) найдем для 

или

Аналогичное выражение для способа-прототипа

и, следовательно, случайная погрешность для способа-прототипа в 2 раза больше.
Следует также отметить, что большая крутизна  вблизи малых углов α существенно улучшает точность автосопровождения цели (по сравнению со способом-прототипом). Более острые углы и
вблизи малых углов α существенно улучшает точность автосопровождения цели (по сравнению со способом-прототипом). Более острые углы и  , чем разностная и суммарная характеристики направленности способа-прототипа соответствуют меньшей неоднозначности пеленга, чем в способе-прототипе. В предлагаемом способе по формуле (1)
, чем разностная и суммарная характеристики направленности способа-прототипа соответствуют меньшей неоднозначности пеленга, чем в способе-прототипе. В предлагаемом способе по формуле (1)
а в способе-прототипе
то есть пеленгационная чувствительность вдвое меньше.
Для реализации предлагаемого способа требуется меньший объем вычислительных операций, чем для способа-прототипа. Действительно, как показано в работе Г.Э.Дж.Болд, из сравнения времени вычислений быстрого преобразования Хартли (БПХ) и быстрого преобразования Фурье (БПФ) (ТИИЭР, 1984, №12, с.184-185) основой быстрого преобразования Хартли (БПХ) является вещественное преобразование, которое требует в два раза меньше машинного времени, чем комплексное преобразование Фурье. Подробный анализ объемов вычислительных операций на БПХ приведен также в книге Р.Брейсуэлл. Преобразование Хартли. М.: Мир, 1990, с.91-120.
Таким образом, эффективность предложенного способа подтверждена. Следует заметить, что для получения такого же повышения точности пеленгования потребовалось бы использовать приемную антенну с размером не L, а 2L. Это является очень существенным фактором, ставшим возможным в результате хартлиевского преобразования в области только вещественных функций.
Технические преимущества сводятся к повышению точности пеленгования и сокращению вычислительных операций.
Экономические преимущества расчету не поддаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Многоканальный пеленгатор радиосигналов ВЧ диапазона | 2020 |
|
RU2752249C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| Способ пеленгования движущегося источника излучения при воздействии импульсных помех | 2023 |
|
RU2810703C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2003 |
|
RU2253877C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |

Изобретение относится к области технической гидроакустики, а именно к способам шумо- и эхопеленгования. Предлагаемый способ основан на использовании разности фаз звуковых колебаний, поступающих на антенну. После преобразования акустических колебаний в электрические осуществляют преобразование Хартли-колебаний по каждому из N приемных каналов. Далее осуществляют их суммирование по всем каналам на каждой из частот хартлиевской области отдельно в области отрицательных частот и отдельно в области положительных частот. Отклонение пеленга на цель формируют, используя просуммированные сигналы отдельно по отрицательным и отдельно по положительным частотам, а фильтрацию осуществляют путем свертки преобразований Хартли. Технический результат - повышение точности пеленгования и сокращение вычислительных операций при сохранении разрешающей способности, 2 н.п. ф-лы, 6 ил.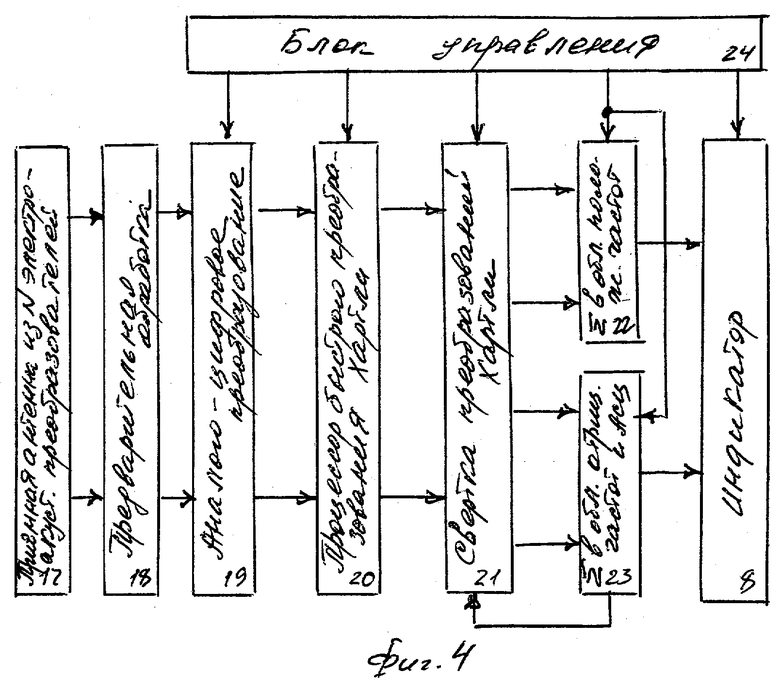
| Тюрин А.М., Сташкевич А.П., Таранов Э.С | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1966, с.184 | |||
| Тюлин В.Н | |||
| Теория акустического пеленгования | |||
| - Л.: ВМАКВ им | |||
| А.Н.Крылова, 1954, с.20. |

